
O. Asseu
Department of Electrical and Electronic Engineering, Institute National Polythechnique Houphouet Boigny, BP 1093 Yamoussoukro, C�te d�Ivoire
S. Ouattara
Department of Electrical and Electronic Engineering, Institute National Polythechnique Houphouet Boigny, BP 1093 Yamoussoukro, C�te d�Ivoire
K.E. Ali
Department of Electrical and Electronic Engineering, Institute National Polythechnique Houphouet Boigny, BP 1093 Yamoussoukro, C�te d�Ivoire
Z. Yeo
Department of Electrical and Electronic Engineering, Institute National Polythechnique Houphouet Boigny, BP 1093 Yamoussoukro, C�te d�Ivoire
M. Koffi
Department of Electrical and Electronic Engineering, Institute National Polythechnique Houphouet Boigny, BP 1093 Yamoussoukro, C�te d�Ivoire
Trends in Applied Sciences Research
Year: 2010 | Volume: 5 | Issue: 2 | Page No.: 91-106







ABSTRACT
This study uses a robust input-output linearization via feedback control in order to assure a good dynamic performance, stability and a decoupling of the stator currents for an induction motor in a field-oriented (d, q) coordinate. However, this control requires the knowledge of certain variables (rotor flux, torque) that are difficult to access or simply impossible to measure and also the rotor time constant variation can induce a performance degradation of the system. Thus, a fifth-order Discrete-time extended Kalman filter approach is proposed for on-line estimation of rotor flux, currents, rotor time constant and torque in an induction motor. The interesting simulations and experimental results obtained on a testing bench for a 5.5 kW induction motor permit to validate the effectiveness and good performance of the proposed nonlinear control and extended Kalman filter algorithm in the presence of parameter variation, modeling uncertainty and measurement noise.
PDF Abstract XML References Citation
How to cite this article
O. Asseu, S. Ouattara, K.E. Ali, Z. Yeo and M. Koffi, 2010. An Extended Kalman Filter Approach for Flux-Sensorless Control of a Linearized and Decoupled Induction Motor Drive. Trends in Applied Sciences Research, 5: 91-106.
URL: https://scialert.net/abstract/?doi=tasr.2010.91.106
URL: https://scialert.net/abstract/?doi=tasr.2010.91.106
INTRODUCTION
Due to lower cost and greater reliability, the Induction Motors (IM) become more and more popular for motion control applications. However, the control of IM is proved very difficult because the dynamic model of the IM is non linear, multidimensional and complex where some parameters vary with temperature, skin effect or saturation. This nonlinear dynamic behavior induces the use of nonlinear feedback control strategy (Yazdanpanah et al., 2008; Mohanty et al., 2002; Asseu et al., 2008) in order to permit a decoupling of the IM variables in a field-oriented (d, q) coordinate so, that stator currents can be separately controlled and then to control independently the generated torque and the rotor flux. On the other hand, to preserve and improve the reliability under parameters variation and noises injected by the inverter (which can induce a state-space “coupling„ and degradation of the system), a robust control approach has been made on the motor drives. This control algorithm uses H-infinity synthesis of currents correctors in order to insure robust stability and performances of the inner current loop.
To guarantee good performances in presence of parameters variations (more specifically the rotor time constant variation) and whereas, advanced induction machine control strategies require knowledge of the instantaneous flux (which is not usually measurable or difficult to access), the technique based on the state observer allowing an on-line estimation of the fluxes and the rotor time constant is necessary.
Accurate estimation of flux in the presence of measurement and system noise and parameter variations is a challenging task. Kalman Filter (KF) named after Rudolph E. Kalman (Kalman, 1960) is one of the most well known and often used tools for stochastic estimation. The KF is essentially a set of mathematical equations (Mohanty and Patra, 2005; Blanchard et al., 2007) that implement a predictor-corrector type estimator that is optimal in the sense that it minimizes the estimated error covariance when some presumed conditions are met. For the flux estimation problem of IM, where parameter variation and measurement noise is present, KF is the ideal one.
Many literatures on the KF technique and its applications, essentially extended for the estimation of the speed, have been published (Hilairet et al., 2009; Murat et al., 2007; Shi et al., 2002). However, this Extended KF (EKF) technique doesn’t take into account the rotor time constant variation.
In the present research, after a brief review of the induction motor model, on the one hand a robust input-output linearization and decoupling scheme is developed and on the other hand, a fifth-order discrete-time EKF, based on KF principle, is proposed to estimate the fluxes, currents and extended for the rotor time constant reconstruction.
Finally, the proposed combination nonlinear feedback control and EKF approach are confirmed by simulations and experimental results carried out on IM drive system in the presence of measurement noise and parameter variations.
MATERIALS AND METHODS
General Test Bench Description
This research project, conducted in the Laboratory of applied Electrical and Electronic (INPHB Yamoussoukro, Côte d’Ivoire) from July 2007 to June 2009 by a theoretical work, has been implemented and validated in real-time on a test bench (Fig. 1). Globally the test bench is composed of electrical fittings, as follows:
| • | A PC-board Pentium 4 which contains the Dspace software (Cockpit, Trace …) and Matlab-Simulink environment |
| • | A 5.5 kW IM coupled with a powder brake completed by current and voltage sensors |
| • | An ASIC card used as communication interface between the PC and a 15 kW three phase static inverter supplied by a voltage source which provides about 0-400V with current limitation of about 6 A (Fig. 2) |
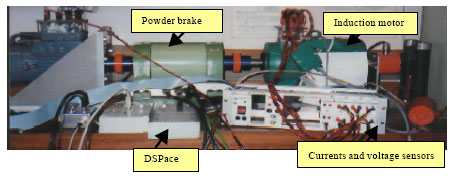 | |
| Fig. 1: | A global view of the test bench |
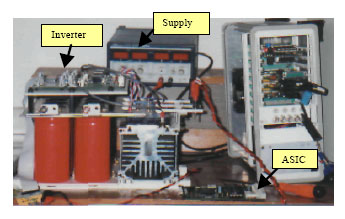 | |
| Fig. 2: | A view of the inverter and ASIC card |
Induction Motor Model
The classical dynamic model of the IM in a (d, q) synchronous reference frame can be represented as a time-varying fourth order system given by De Fornel and Louis (2007), with as state variables the stator currents (Ids, Iqs) and the rotor fluxes (Φdr Φqr):
 | (1) |
 |
The electromagnetic torque defined in terms of x is:
| (2) |
Moreover, by choosing a rotating reference frame (d, q) so that the direction of axe d is always coincident with the direction of the rotor flux representative vector (field orientation), it is well known that this rotor field orientation in a rotating synchronous reference frame realizes:
Φdr = Φr = Constant and Φqr = 0 |
Thus, the dynamic model of the IM, completed with the output equation, can be rewritten as:
 | (3) |
This Eq. 3 shows that the dynamic model of the IM can be represented as a non-linear funct ion of the rotor time constant. A variation of this parameter can induce, for the IM, a lack of field orientation, performance and stability. Thus, to preserve the reliability, robustness performance and stability of the system under parameters variation (in particular the rotor time constant variations) and measurement noise, we can use a robust feedback linearization strategy to regulate the motor states.
Robust Feedback Control
In order to control stator currents and then control independently the generated torque and the rotor flux, an input-output linearization approach is used in this study. We can see that the system Eq. 3 has relative degree r1 = r2 = 1 and can be transformed into a linear and controllable system by chosen the feedback control given by the following form:
 | (4) |
The matrix Δ(x) is nonsingular, so the linearizing control Eq. 4 is effective and leads the system Eq. 3 to two decoupled subsystems, each one is composed of an integrator.
The new inputs of the obtained decoupled systems are v1 and v2. It can be determined by chosen a first order dynamic behaviour with a time constant T = 1/K. Two block diagrams for the control of Ids and Iqs can be summarized as follows:
 |
where, i = 1, 2 corresponding, respectively to Ids and Iqs with P(s) = 1/ (1+ T.s) .
In order to take into account the physical parameter variations and noises, a second loop using robust control approach has been added. The new block diagram structure is given by:
 |
where, the controller C(s), using H∞ synthesis and Doyle method (Doyle et al., 1992) is defined as:
| (5) |
The real t0 is an adjusting positive parameter, chosen adequately small (t0 < 1), in order to satisfy the robustness performance, to have a good regulation and convergence of the currents.
However, the control of an IM generally required the knowledge of the instantaneous flux of the rotor that is not measurable. Also, a variation of the rotor resistance can induce a lack of field orientation. In order to achieve better dynamic performance, an on-line estimation of rotor fluxes and resistance is necessary. Thus, an Extended Sliding Mode Observer (ESMO) is widely used (Asseu et al., 2008; Amuliu and Ali, 2007) with success for on-line estimation of rotor fluxes (Φdr, Φqr), rotor time constant (σr =1/Tr = Rr/Lr) and torque (Cem).
In this study, in order to compare with the ESMO and respect to the rotor time constant variations in the presence of measurement and system noise (stochastic estimation), an EKF’s algorithm for flux estimation and extended for the rotor time constant reconstruction is presented and explained.
Model of Extended Kalman Filter
For parameter estimation using a full order EKF, the model structure given by Eq.1 is discretized directly using Euler approximation (1st order) proposed by Lewis (1992). Furthermore, the state vector is extended to rotor time constant. Thus, the new discrete-time and stochastic fifth-order nonlinear model is given by:
 | (6) |
where:
 |
 |
where, x(k) and y(k) are the state vector and output, respectively at the k-th sampling instant, i.e., t = k.Te with Te the adequate sampling period chosen without failing the stability and the accuracy of the discrete-time model. n(k) represents the random disturbance input; it is the sum of modeling uncertainty, the discretization errors and the system noise. r(k) is the measurement noise. Both n(k) and r(k), are assumed to be white Gaussian noise with zero mean and covariance matrix Q and R, respectively. Consider that:
| • | : | The estimate of xe(k) and K(k + 1) = EKF gain | |
| • | : | The linear minimum mean square estimate of xe(k+1) | |
| • | P(k +1| k) | : | State prediction covariance error |
| • | P(k+1|k+1) | : | State estimation covariance error |
| • | Initialization givens | : |
The steps of the proposed fifth-order EKF algorithm are as follows:
 | (7) |
The EKF algorithm consists of repeated use of step (1-8) for each measurement. F(k) is the Jacobian matrix of partial derivatives of f(•) with respect to xe(k). From Eq. 6, we obtain:
 |
RESULTS
In order to verify the feasibility of the proposed EKF, the simulation on SIMULINK from Mathwork has been carried out for a 5.5 kW induction motor controlled with a linearization via feedback algorithm (Fig. 3). The nominal electrical parameters of the IM, estimated by means of the identification techniques proposed by the authors in the references (Leite et al., 2003; De Fornel and Louis, 2007), are shown in the Table 1.
The EKF algorithm is implanted in a S_function using C language. In order to evaluate its performances and effectiveness, the comparisons between the observed state variables and the simulated ones have been realized for several operating conditions with the presence of about 10% noise on the simulated currents.
| Table 1: | Nominal parameters of the induction motor |
 | |
 | |
| Fig. 3: | Simulation scheme |
Thus, the simulations are obtained at first in the nominal case with the nominal parameters of the IM used to realize vector control orientation and then, in the second case, with 50% variation of the nominal rotor time constant (σr = 1.5σrn) in order to verify the rotor time constant tracking and flux estimation.
Initialization and Tuning of the EKF Algorithms
The full order EKF is initialized as follows: P5x5(0) = diag {10¯6} and xe(0) = [ 0 0 0 0 σrn ]T with σrn = Rrn/Lrn.. Furthermore, the measurement noise covariance matrix has been fixed as follows: R2x2 = diag {10-3} and the system covariance matrix can be adjusted by:
Q5x5 = diag {qi} with qi ∈ [0 1] , i = 1, .., 5 |
The real qi must be tuned adequately small (qi < 1) in order to have a good performance, convergence and considerable rapidity of the EKF. Our proposed Feedback control and EKF algorithm operate with a sampling period Te = 1 ms and using Euler approximation.
Simulation Results
Figure 4 and 5 show the simulation results for a step variation of the currents reference (IdsRef and IqsRef). One can see that in both nominal (Fig. 4) and non-nominal cases (Fig. 5), the estimated values of currents, fluxes, torque and rotor time constant converge very well to their simulated values. The observed fluxes (Fig. 4b, 5b) indicate the good orientation (Φdr is constant and Φqr converges to zero) due to a favorable rotor time constant estimation (Fig. 4d, 5d). In the case of rotor resistance variation where Rr = 1.5Rrn (Fig. 5), we can see a light perturbation on the flux orientation (Fig. 5b) tied to the starting of the IM (at the instant t =2 sec) when a step variation in Iqs (0 to 6 A) is applied in order to generate the required torque. However, after the IM starting of the motor (at the instant t>3 sec), the flux orientation and currents responses remain acceptable despite a step change in the current Iqs (from 6 to 4 A at the instant t = 5 sec).
These waveforms illustrate the fast convergence and high performance of the robust decoupling control and EKF against rotor time constant variations and noises.
Experimental Results
Finally, the implementation in real-time of the proposed scheme is carried out on the testing bench given by the Fig. 1. Figure 6 shows the experimental set-up.
 | |
| Fig. 4: | Nominal case (Rr = Rrn): Comparison between estimated and simulated values |
 | |
| Fig. 5: | Non Nominal case (Rr = 1.5HRrn) with the presence of noises |
 | |
| Fig. 6: | Experimental configuration diagram |
This Fig. 6 is composed of a 5.5 kW IM, a powder brake with load torque measurements, three LEM current sensors and a 2000 point incremental encoder. A PC-board and a Dspace1102 combined a TMS320C31/40Mhz are used to implement PWM function and control algorithms. The PWM and the position measurement work at 10 kHz.
Two kinds of tests have been performed (without and with load torque) in order to compare the simulation and experimental results and show the robustness of the nonlinear control and EKF algorithm against modeling uncertainty and measurement noise.
The first one (Fig. 7) illustrates the results where the motor speed is regulated at Ωn = 800 rpm without load torque (Cl ≅ 0 N.m ) and with a stator current reference IdsRef = 4 A.
In the second one (Fig. 8), a step change in the stator current reference IqsRef (from 3.5 to 2.5 A) has been made for a motor speed regulated at 1000 rpm with a load torque Cl = 1.5 Nm.
For each test, measured and observed values have been registered and have been compared to simulation values. Better estimation performance yielded by the proposed EKF is obvious from the experimental results. Thus, it can be seen that the experimental waves are quite similar to the simulation ones. The experimental observed fluxes (Fig.7e, 8e) indicate a good orientation (the flux Φqr converges well to zero) which is due to a favourable rotor time constant estimation (Fig. 7f). Here, the rotor time constant effectively drifts with the overheating of the IM because its estimated value is inferior to the nominal one (σrn = 10.16 sec¯1). The experimental estimated torque (Fig. 7g, 8f) is in good agreement with the simulated value. The weak perturbations on the experimented fluxes or torque are probably tied to position noises and the inverter.
Moreover, Fig. 8 proves the effectiveness of the proposed feedback linearization strategy in order to decouple the stator currents and then control independently the generated torque and the rotor flux. The currents Ids and Iqs are controlled at 2 and 3.5 A, respectively. A step variation in Iqs (3.5 to 2.5A) is applied (Fig. 8a, b) in order to generate a torque change (Fig. 8f). The waveforms show the good uncoupling between the currents Ids and Iqs. Thus, the field orientation and the synthesis of robust linearization and decoupling control are well verified. The agreement between the experimental dynamic performance and the simulated ones is demonstrated. The performance of the EKF algorithm has proved to be as good as the one obtained with the ESMO against parameter variation and noise.
 | |
 | |
| Fig. 7: | a-h) Results for regulating the speed motor to 800 rpm without load torque C1 @ 0 N.m |
 | |
 | |
| Fig. 8: | (a-f) Results for regulating the speed motor to 1000 rpm with a load torque C1 @ 1.5 N.m and a step change of current Iqs (from 3.5 to 2.05 A) |
CONCLUSION
The case study that was presented in this research was chosen as a proof of concept and shows that the combination feedback control and EKF approach works well and is quite robust. For this purpose, rotor flux, torque and rotor time constant in the IM are estimated using Extended Kalman filter. Torque and rotor flux are decoupled and the IM model is linearized using a robust feedback linearization approach. Sensorless control of the linearized and decoupled drive using estimated flux and rotor time constant is simulated and carried out on the testing bench. The good simulation and experimental results obtained on the Induction motor show the effectiveness and the stability of this robust decoupling control and EKF algorithm is found to be very good and fast for flux and rotor time constant estimation in the presence of system and measurement noise. Thus, the dynamic response of IM sensorless drive control using an EKF flux estimation technique is as fast as that of drives with physical sensors.
NOMENCLATURES
| Cem, Cl | : | Electromagnetic and load torques (N.m) |
| Ids, Iqs | : | Stationary frame (d, q)-axis stator currents (A) |
| Idr, Iqr, Imr | : | Stationary frame (d, q)-axis rotor currents and rotor magnetizing current (A) |
| p, J, f: p | : | Pole pair No.; J : Inertia (kg m¯2); f : friction coefficient (Nm.s rad¯1) |
| Lr, Ls, Lm, Lf | : | Rotor, stator, mutual and leakage inductances (H) |
| Rs, Rr | : | Stator and rotor referred resistance (Ω) |
| Te , Tr , Ts | : | Sampling period, rotor and stator time constant: Tr = Lr /Rr ; Ts = Ls/Rs (s) |
| Vds, Vqs | : | Stationary frame d- and q-axis stator voltage (V) |
| Φdr, Φqr, Φds, Φqs | : | d-q components of rotor fluxes (Φdr, Φqr) and stator fluxes (Φds, Φqs), (Wb) |
| ωs, ωr, ωsl | : | Stator, rotor and slip pulsation (or speed), (rad s¯1) |
REFERENCES
- Amuliu, B.P. and K. Ali, 2007. Sliding-mode flux observer with online rotor parameter estimation for induction motors. IEEE Trans. Ind. Elect., 54: 716-723.
CrossRefDirect Link - Asseu, O., M. Koffi, Z. Yeo, X. Lin-Shi, M.A. Kouacou and T.J. Zoueu, 2008. Robust feedback linearization and observation approach for control of an induction motor. Asian J. Applied Sci., 1: 59-69.
CrossRefDirect Link - Blanchard, E., S. Adrian and C. Sandu, 2007. Parameter estimation method using an extended kalman filter. Proeedings of the Joint North America, Asia-Pacific ISTVS Conference and Annual Meeting of Japanese Society for Terramechanics, June 23-26, Fairbanks, Alaska, USA., pp: 1-14.
Direct Link - Hilairet, M., F. Auger and E. Berthelot, 2009. Speed and rotor flux estimation of induction machines using a two-stage extended Kalman filter. Automatica, 45: 1819-1827.
CrossRefDirect Link - Kalman, R.E., 1960. A new approach to linear filtering and prediction problems. Trans. ASME. J. Basic Eng., 82: 35-45.
Direct Link - Leite, V.T., R.M. Araujo and D.R. Freitas, 2003. A new online identification methodology for flux and parameters estimation of vector controlled induction motors. Electric Machines Drives Conf. IEEE Int., 1: 449-455.
CrossRef - Mohanty, K.B., N.K. De and A. Routray, 2002. Sensorless control of a linearized and decoupled induction motor drive. Proceedings of the National Power System Conference, December 27-29, 2002, Kharagpur, India, pp: 46-49.
Direct Link - Mohanty, K.B. and A. Patra, 2005. Flux and speed estimation in decoupled induction motor drive using Kalman Filter. Proceedings of 29th National System Conference, December 2005, IIT, Mumbai, pp: 1-9.
Direct Link - Murat, B., S. Bogosyan and M. Gokasan, 2007. Speed-sensorless estimation for induction motors using extended kalman filters. Ind. Electronics IEEE Trans., 54: 272-280.
CrossRef - Shi, K.L., T.F. Chan, Y.K. Wong and S.L. Ho, 2002. Speed estimation of an induction motor drive using an optimized extended Kalman filter. Ind. Electronics IEEE Trans., 49: 124-133.
CrossRefDirect Link - Yazdanpanah, R., J. Soltani and G.R. Arab Markadeh, 2008. Nonlinear torque and stator flux controller for induction motor drive based on adaptive input-output feedback linearization and sliding mode control. Energy Convers. Manage., 49: 541-550.
CrossRef
Alm Reply
thank you very much its a wonderfull site easy to use and usefull papers