
A. Ranjit
Department of Electronics and Communication Engineering, School of Electrical and Electronics Engineering, SASTRA University, Thanjavur, 613 401, India
Amit Raj
Department of Electronics and Communication Engineering, School of Electrical and Electronics Engineering, SASTRA University, Thanjavur, 613 401, India
J.B.B. Rayappan
Department of Electronics and Communication Engineering, School of Electrical and Electronics Engineering, SASTRA University, Thanjavur, 613 401, India
Research Journal of Information Technology
Year: 2013 | Volume: 5 | Issue: 3 | Page No.: 411-418







ABSTRACT
This study proposes the usage of humanoid as a sensor node, which uses its inherent locomotion abilities that turns the sensor node dynamics simultaneously on with an installation of a transceiver. The humanoid is capable of wireless transmission of sensor data to a place of desired location and accordingly correction measures can be taken. The system requires the development of three independent modules namely the humanoid, a transmitter/receiver and a sensor node. The humanoid is manually operated through an on-board Atmega kit and an interface (computer) at operator’s side. It is developed to move forward, turn right and left and sitting still when power to its servos is turned off. The transmitter/receiver module operating at 433 MHZ is capable of sending 4 bit parallel data. Transceiver is fed data through an encoder with 4 data lines, likewise at receiver end a decoder with 4 output data lines is used. Sensor module consists of Volatile Organic Compound (VOC) sensor, studied with ethanol in the present paper. Its output is fed to 4 comparators whose outputs in turn are fed to data lines of an encoder which is provided with 4 variable range concentration windows. Finally sensor and transmitter/receiver module is integrated and installed on the humanoid. Hence humanoid can be sent to a remote location and ethanol concentration can be detected.
PDF Abstract XML References Citation
Received: April 29, 2013;
Accepted: May 16, 2013;
Published: August 06, 2013
How to cite this article
A. Ranjit, Amit Raj and J.B.B. Rayappan, 2013. Humanoid as a Sensor Node. Research Journal of Information Technology, 5: 411-418.
URL: https://scialert.net/abstract/?doi=rjit.2013.411.418
URL: https://scialert.net/abstract/?doi=rjit.2013.411.418
INTRODUCTION
The design and implementation of humanoid with various application possibilities have been explored in detail (Tanie and Yokoi, 2003; Tanie, 2003; Sawasaki et al., 2003; Kuroki et al., 2003). Increased progression in the research area of Humanoids shows that it is one platform which is gaining increased attention. Day by day the areas of applying humanoids are discovered and are under research for practical possibilities. It is resourceful to habituate human motion to regulate that of the humanoid but it is worthy to mention here is the fact that it is very much complicated. It is not just mere direct applications of humans, because humanoid acquires its stance with the help of dynamic difference and other parameters. Humanoids do need a posture management structure to control them. Of all prime intriguing tasks to build a human-behaving like-Humanoid are compliance control, actuators and motors control, intelligence, walking pace, control over DOF etc. Doing a research in humanoids needs knowledge in various disciplines of engineering and science; thus making it a further provocative expanse of Mechatronics Engineering.
Humanoid robots are created and used for research purposes to perform operations which can be hazardous to human life (Gupta et al., 2006; Fujun et al., 2009). Since it needs to exhibit bipedalism, maintaining stability in various walking sequences is the major constraint. Every walking sequence should be defined so that all forms of locomotive motions can be achieved and any sort of application can be appended. Desired features may also be added to it by installing sensors and other devices. Volatile Organic Compound (VOCs) includes toluene, ethanol, organic solvents etc. VOC sensor preferably semiconductor type has improved reliability and sensitivity over others. Thus by using VOC sensor, concentration of required gas or quality of air can be measured. As mentioned earlier, combinational studies provide helping hand in case of humanoids for instance neural networks, advance filters are being used to study the postural balance. If entire motion of the body is separated into more than a few fractional actions, the intricacy involved in the planning of full body motion for humanoids that too with higher DOF. As far as stepping stance is concerned, there should be stability and poise which can be obtained through and through control, prototyping, simulation last but not at all the least trialing or experimentation. Right from DOF, feedback controls, bias controls, system dynamics, responsive forces, trajectories etc. all should be taken into consideration while dealing with humanoids (Chen and Yong, 2012).
With the exception of general purpose robots, researchers have proposed various methodologies on humanoids for specific purposes and functions for example games. To name one, there are good numbers of papers discussing about soccer robots. For these walking gait forms the basis of postural balance. The main traits of a soccer humanoid are namely stancing stability, eminent tractability and sensorial acuity. With the appropriately developed walking pace, stability and speed in walking is enhanced (Jingdong et al., 2007).
The broad characteristics of a humanoid robot can be given in terms of whole body motion planning that includes planning of global path, local motion and task. Of these the first planning can be of online and offline. Second planning can be categorized into of three methods. They are modeling methods, non modeling methods and intelligent controls, respectively. Task planning denotes the research direction in the humanoid robot. The research may develop in the fields of modeling based on system dynamics, unstructured environment, intelligent search and control (Bo et al., 2010).
Humanoids’ similarity movement is yet another interesting domain of research catching concentration. Numerous studies in similarity movement give a clear view about the dynamic and kinematic controls, capturing the joint tracks etc. Needless to mention Synchronous control is an indispensable factor in structuring humanoids (Wen-De et al., 2012).
DESIGN METHODOLOGY
Humanoid: A step represents the position of all the servos and collection of steps form a sequence. In addition, stable gait speed and leg lift for a humanoid are the major concerns. A stable home position as shown in Fig. 1, is defined which is the reference step for any sequence made and hence is made the first step in all the sequences. This is very important for stability since we don’t know after which step a new sequence will be played. Simultaneously the stable home position should be such that it can be achieved after any of the step. Following sequences are defined:
| • | Forward walk |
| • | Turning left |
| • | Turning right |
| • | Power off stat |
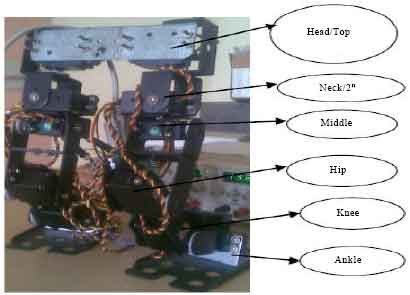 | |
| Fig. 1: | Servos in humanoid |
Following are the various sequences installed in humanoid in addition to stable home position.
| • | Forward walk |
| • | Turning left |
| • | Turning right |
| • | Stable power off position |
Forward walk: This sequence consists of 20 steps with 1st step being the stable home position. This sequence should be repeated as long as forward motion is required. Sequence begins with the humanoid lifting its left leg and stepping forward, this happens till the 11th step when the humanoid is standing again with left leg stretched forward. In the remaining 9 steps it pulls right leg and stretches it forward. So after 20th step humanoid is standing with right leg stretched forward.
Turning left: This sequence consists of 18 steps with 1st step being the stable home position. At the end of sequence humanoid turns 90 degree left. In the following order servo position is modified:
| • | Ankle (left and right) → left top → turn left leg → both legs on ground → left neck and ankle |
| • | Later adjustments were made to bring humanoid to stable position |
Turning right: This sequence consists of 19 steps with 1st step being the stable home position. At the end of sequence humanoid turns 90 degree left. In following order the servo position is modified:
| • | Ankle(left and right) → right hip and left ankle → right ankle and middle → ankle and neck → left top → left hip, middle(left and right) → both legs on ground |
| • | Later adjustments were made to bring humanoid to stable position |
Stable power off position: This is a small sequence comprising only 3 steps. It will lead the humanoid to position. In case the servo power supply needs to be switched off, the humanoid should be brought in this position as it can stand on its own (without external support) when power supply is switched on. Here in 2nd step hip (right and left) was modified and later middle (right and left) was modified.
TRANSCEIVER MODULE
Transmitter module: The transmitter module consists of two components namely encoder,”2^12 Series of Encoders (Holtek Semiconductor Inc, 2000) and transmitter. Transmitter consists of four pins meant for supply, ground, antenna and data. A single wire can also be used as antenna and for a range of 100 m it need not be connected. Transmitter accepts serial data which could be provided using an encoder or a micro-controller. In case microcontroller is used error correcting codes should also be sent. Usage of micro-controller has a disadvantage when integrated with humanoid. It requires peripheral support circuit which unnecessarily increases the weight. On the other hand encoder circuit consists of a single IC with already incorporated parity bits. The encoder has 8 address lines and 4 data lines. So for each address 4 bit data can be sent. The encoder accepts 4 bits parallel data, converts it into serial and feeds it into transmitter data line.
Transmission enable pin is used as gate for data out. It is active low and when enabled data present on data lines of encoder are transmitted.
Receiver module: It consists of receiver and decoder,”2^12 Series of Decoders (Holtek Semiconductor Inc, 2000). The receiver has supply lines, antenna and data line. The decoder IC is similar to encoder with 8 address and 4 data lines. It coverts serial data received from receiver into 4 bit parallel data. The output of decoder is 4 bit data corresponding to each address lines. It retains the previous data till new data is received. Normally data lines will be high till a o is received. The data received could be verified by VT pin, it is high only when there is a valid transmission.
The transmitter and receiver module are shown in Fig. 2. Transmitter module is installed on humanoid while receiver module should be kept wherever control circuit is required.
SENSOR MODULE
The sensor module consists of sensor (CS71-A01) and comparator (LM324) circuit). CS71-A01 is a semiconductor type VOC (Volatile Organic Compound) gas sensor. In the presence of detectable gas, sensor resistance decreases depending on the gas concentration in air. In current project sensor calibration is done for ethanol.
VOC sensor: It has a metal oxide semiconductor layer as sensing material, VOC sensor”, (Sample and Kit Total Solution, 2007) and integrated heater formed on an alumina substrate using thin and thick film technology. When exposed to detectable gas, sensor’s resistance decreases depending upon concentration of gas in air. Hence it can be used along with a simple electronics circuit as shown in Fig. 3 which could convert the resistance change into voltage signal corresponding to change in gas concentration.
Comparator: Comparators are provided with individual potentiometers for fixing different reference voltage in case gas concentration threshold need to be changed.
 | |
| Fig. 2: | Transmitter and receiver circuit |
 | |
| Fig. 3: | Simple electronics circuit |
 | |
| Fig. 4: | Sensor module and encoder |
 | |
| Fig. 5: | Decoder and indicator |
 | |
| Fig. 6: | Functional block diagram 1 |
Sensor o/p is fed into inverting terminal while reference voltage is fixed on non-inverting terminal. This is done because on receiver side decoder data lines will be normally high until a 0 is received. The four op-amps O/Ps are fed to encoder through which they are transmitted.
On receiver side four LEDs are used as indicator indicating various threshold concentration levels. Thus the overall sensor module and transmitter/receiver module is as shown in Fig. 4 and 5.
Thus the whole setup can be summarized into following functional diagram 1 and 2 as shown in Fig. 6 and 7, respectively.
 | |
| Fig. 7: | Functional block diagram 2 |
| Table 1: | Vout for different concentration of ethanol |
 | |
RESULTS AND DISCUSSION
Objectives achieved: The desired four sequences have been added to humanoid with appreciable stability over smooth surface. The sensor module designed gives us the choice to fix 4 concentration windows with variable concentration range of a specific VOC. Whenever VOC’s concentration exceeds a threshold it will enter into a next window and the corresponding comparator output goes low which is sent via transmitter module and a LED glows at receiver. This has been achieved over a range of 100-150 meters.
The concentration window selected were (0-50), (50-100), (100-150), (150-200) ppms. Vout for different concentration of ethanol is listed in Table 1.
CONCLUSION
Though the range of window can be arbitrarily selected but an arrangement for exact concentration is not made. In doing so transmitter module needs to be redesigned for 8 bit transmission. A separate controller board needs to be installed over humanoid which could serve ADC and comparator operation simultaneously. This will increase the weight on humanoid which will obviously disturb its stability. So if any feature or application is required then stable home position and sequences should be redefined.
ACKNOWLEDGMENT
Authors sincerely thank SASTRA University for the financial support (Innovation Project No.4) and for the infrastructural support.
REFERENCES
- Fujun, H., S. Yingfei, L. Xiaolei and D. Zhijiang, 2009. Humanoid detection of indoor dangerous gas source by mobile robot. Proceedings of the International Conference on Automation and Logistics, August 5-7, 2009, Shenyang, pp: 237-242.
CrossRef - Tanie, T. and K. Yokoi, 2003. Humanoid and its potential application. Proceedings of the International Conference on Industrial Technology, Volume 1, December 10-12, 2003, IEEE., pp: 1-6.
CrossRef - Tanie, K., 2003. Humanoid robot and its application possibility. Proceedings of the Conference on Multisensor Fusion and Integration for Intelligent Systems, July 30-August 1, 2003, IEEE., pp: 213-214.
CrossRef - Wen-De, K., H. Bing-Rong, C. Gang, P. Zhi-Ping, Y. Quan-De and H. Liang, 2012. Study of key pose of movement similarity on humanoid robot. Inf. Technol. J., 11: 1612-1628.
CrossRefDirect Link - Sawasaki, N., T. Nakajima, A. Shiraishi, S. Nakamura, K. Wakabayashi and Y. Sugawara, 2003. Application of humanoid robots to building and home management services. Proceedings of the International Conference on Robotics and Automation, Volume 3, September 14-19, 2003, IEEE., pp: 2992-2997.
CrossRef - Gupta, P., V. Tirth and R.K. Srivastava, 2006. Futuristic humanoid robots: An overview. Proceedings of the 1st International Conference on Industrial and Information Systems, August 8-11, 2006, Peradeniya, pp: 247-254.
CrossRef - Jingdong, Y., H. Bingrong, P. Songhao and H. Qingcheng, 2007. An efficient strategy of penalty kick and goal keep based on evolutionary walking gait for biped soccer robot. Inform. Technol. J., 6: 1120-1129.
CrossRefDirect Link - Kuroki, Y., M. Fujita, T. Ishida, T.K. Nagasaka and J. Yamaguchi, 2003. A small biped entertainment robot exploring attractive applications. Proceedings of the International Conference on Robotics and Automation, Volume 1, September 14-19, 2003, IEEE., pp: 471-476.
CrossRef - Chen, Z. and W. Yong, 2012. Postural balance of humanoid step stance via hybrid space formulation. J. Applied Sci., 12: 736-744.
CrossRef - Bo, Z.Q., H.B. Rong, P.S. Hao and P.Q. Shu, 2010. Complex motion planning for humanoid robot: A review. Inform. Technol. J., 9: 1270-1277.
CrossRefDirect Link