
M. M. Mahmoud
Department of Production Engineering and Mechanical Design, Faculty of Engineering, Minia University, P.O. Box 61111, El-Minia, Egypt
Journal of Applied Sciences
Year: 2016 | Volume: 16 | Issue: 10 | Page No.: 491-495







ABSTRACT
Objective: Robots are involved extensively for materials handling in many industrial applications, where friction is important for the safety of materials handling. This present study aims to discuss the frictional behavior of glove materials sliding against glass sheet at various contact conditions. Methodology: An experimental program is designed for testing different glove materials sliding against glass sheet. Where, eight different glove materials were selected and tested to measure the coefficient of friction at dry, water wetted and oily conditions using test rig that constructed and manufactured for this purpose. Results: It was found that at dry sliding, the glove materials of the highest friction coefficient were latex, synthetic rubber, wool, nylon, cotton, natural rubber I, natural rubber II and polyester. At water wetted sliding, the highest friction values were displayed by natural rubber II, natural rubber I, cotton, synthetic rubber, wool, polyester, latex and nylon. At oily sliding, the ranking of the tested gloves were natural rubber I, natural rubber II, nylon, wool, cotton, synthetic rubber, polyester and latex. The drastic friction decrease observed at oil sliding of latex endangered the materials handling, therefore, it was recommended to avoid such types of gloves at oily applications. The values of friction coefficients under polyester at the three sliding conditions were too low to be safely used in applications. Conclusion: Glove materials were classified and ranked based on the measured coefficient of friction. This highlights the dependency of glove materials selection on the contact conditions to fulfill grip requirements and working conditions for efficient handling and mobility performance.
PDF Abstract XML References Citation
Received: May 30, 2016;
Accepted: July 15, 2016;
Published: September 15, 2016
How to cite this article
M. M. Mahmoud, 2016. Frictional Behavior of Different Glove Materials Sliding Against Glass Sheet. Journal of Applied Sciences, 16: 491-495.
DOI: 10.3923/jas.2016.491.495
URL: https://scialert.net/abstract/?doi=jas.2016.491.495
DOI: 10.3923/jas.2016.491.495
URL: https://scialert.net/abstract/?doi=jas.2016.491.495
INTRODUCTION
Robotic manipulators were used extensively in both research and industrial applications such as CNC machining, material assembly, welding and painting. Touching was one of the critical properties that enhance the safety of materials handling. Sensors that can reveal tactile information were developed in order to equip robot hands with such a sense1,2. Development of the materials used in robots were a critical factor for increased safety and efficiency. Gripping forces may be reduced using high-friction surfaces3. Thus, it was selected foamy polymers as a suitable type of friction-enhancing material for grippers of the climbing robot. Friction coefficient of the contacting surfaces can control the safety of material handling through increasing the gripping force. The friction coefficient of the tactile sensor was tested4. Variety of materials such as foamy polymers and sandwich-like microstructures were tested as shoe soles for potential robot5,6. The friction coefficients under hands sliding against the surface of the steering wheel covers was discussed7. Measurement of friction coefficient was of critical importance in assessing the proper friction properties of steering wheel covers and their suitability to be used in application to enhance the safety and stability of the steering process during car driving. Experiments showed that friction coefficients under the dry sliding of hand against the tested steering wheel covers decreased with increasing normal load. Besides, friction coefficient showed significant increase for covers compared to wheel without cover. In addition to that, friction coefficient drastically decreased due to the presence of the grease film covering the sliding surfaces.
The rate of car accidents throughout the world is increasing and it is necessary to introduce laboratory and simulating studies to ensure the safety of the different friction elements of car parts. Although, a number of studies were related to safety of the driving of the car, no attention was actually taken up that can indicate safety, stability and control of the steering wheel. An acceptable value of friction should be obtained to prevent slip between the hands of the driver and the surface of the steering wheel. Measuring the friction coefficient was off importance between the driver’s hands sliding against dry, water wetted and greasy steering wheel covers. The knowledge of steering-wheel grip force characteristics of the drivers may benefit the automobile designers and manufacturers to improve the quality of their products in terms of comfort and driving performance. The steering-wheel grip force of male and female drivers driving an automobile was studied8,9. Results indicated that the vehicle speed and the road condition did not significantly affect these response variables.
In a recent study, the friction coefficients under clothes sliding against car seat covers was discussed10. The frictional performance of two groups of covers, the first was contained 5 different types of synthetic leather and the second contained 9 different types of synthetic textiles, was measured. It was found that, synthetic leather displayed relatively higher friction coefficient than synthetic textiles when sliding against dry polyester clothes, where the highest friction value exceeded 0.6. At water wetted sliding, significant drop in friction coefficient was observed for synthetic leather specimens. Synthetic textiles showed relatively higher friction than synthetic leather. For the sliding of dry cotton clothes, significant friction increase for synthetic leather was observed.
The aim of the present study was to measure the friction coefficient of the tested materials in order to increase the safety of material handling. Eight different types of gloves were tested by sliding against glass sheet at dry, water wetted and oily conditions.
MATERIALS AND METHODS
Experiments were carried out using a test rig to measure the friction coefficient between glove materials sliding against glass sheet. The frictional performance was evaluated using a test rig designed and manufactured to measure the friction coefficient through measuring the friction force and applied normal force (Fig. 1).
The glass sheet was assembled to the base of the test rig. Load was applied by finger acting on the sheet in the normal direction. Friction force generated from moving the finger on the glass sheet in the horizontal direction as shown in Fig. 2.
The different types of glove materials as illustrated in Fig. 3. Corn oil was used to lubricate the sliding surfaces to simulate the condition of the oily sliding.
 | |
| Fig. 1: | Experimental arrangement of the test rig |
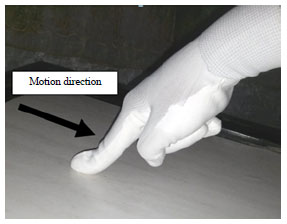 | |
| Fig. 2: | Motion direction of friction force measurements |
 | |
| Fig. 3(a-f): | Tested glove materials, (a) Cotton, (b) Latex, (c) Polyester, (d) Nylon, (e) Natural leather I and (f) Natural leather II |
RESULTS AND DISCUSSION
Figure 4 shows results for the load-dependence of the measured friction coefficients for the 8 tested glove materials sliding dry against glass sheet. It can be noticed that latex shows the higher friction values followed by synthetic rubber, wool, cotton, natural leather I and polyester. Also it is clear that the coefficient of friction increases with increasing the applied load except the gloves made of natural leather II. The contact area may be played the dominant role to increase or decrease the value of the measured friction coefficient. This leads to the textured surface of the natural leather II could by have more protrusions than other glove materials.
 | |
| Fig. 4: | Friction coefficient of glove materials sliding on dry, against glass sheet as a function of normal load |
 | |
| Fig. 5: | Friction coefficient of glove materials sliding in presence of water, against glass sheet as a function of normal load |
Generally, rough surfaces wear more quickly and have higher friction coefficients than smooth surfaces and these agree with the trends reported11-13. Therefore, based on the obtained previous results, it can be suggested use the latex and synthetic rubber gloves when dry handling applications, respectively.
Figure 5 shows a plot of the measured coefficient of friction for the tested gloves, which were water wetted slid against glass sheet. The gloves made of natural leather I and II displayed a steady ascending frictional manner comparing to the other glove materials with increasing the applied normal load. It can be attributed to the ability of the natural leather to absorb water more than other tested materials and also to its ability to keep it for a long time.
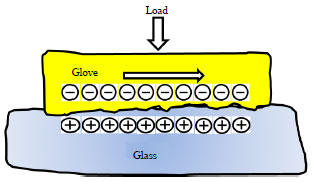 | |
| Fig. 6: | Generation of the double layer of electric static charge on the sliding surfaces |
 | |
| Fig. 7: | Friction coefficient of glove materials sliding in presence of oil, against glass sheet as a function of normal load |
In fact, the presence of water on the interfacial surfaces influences friction properties14. Moreover, this behavior can be explained on the basis of triboelectrification, where generation of equal electric static charge on the sliding surfaces of different signs would increase the attractive force between the two surfaces and consequently the adhesion increased leading to friction increase. In the presence of water film trapped by the sliding surfaces, the electric static charge would be homogeneously distributed so that the adhesion increased. When two materials contact each other, the upper one in the triboelectric series will get positively charged and the other one will be negatively charged. As the difference in the rank of the two materials increases the generated voltage increases. It is known that glass is ranked as positive charged material, while the glove materials are lower than glass so they are positive charged (Fig. 6). It is therefore, necessary to select the materials based on their triboelectric charging15-19. Oil film covering the sliding surfaces insulated the two surfaces and prevented the distribution of the electric static charge. Based on these observations, it can be recommended that the natural leather gloves can be chosen to use in case of water wetted gripping.
Figure 7 illustrates the friction values for various glove materials sliding against glass in presence of oil at the contact surface. It can be seen the same trend that obtained in presence of water at the contact surface. But the values are much lower than the friction values reached nearly to the half of those in case of water wetted sliding. Both gloves made of natural leather I and II show the higher friction values in comparison with the other glove materials. The gloves made of natural leather I exhibited the higher values of coefficient of friction than that obtained from natural leather II. It seems that the tested natural leather gloves stored the oil in its ridges and protrusions which existed in the surface of the natural leathers and then fed it back to form a film of lubricant on the sliding surface. In this location there is no triboelectrification effect because the oil film that covering the sliding surfaces, insulated the two surfaces and prevented the distribution of the electric static charge. Moreover, the amount of oil penetrating gloves can considered as a factor influenced the values of friction20. Due to this, the gloves lost their protective properties to resist tangential forces reducing the displayed friction coefficients. Based on the previous results, it can be nominated that the gloves made of natural leather can be used in case oily applications.
CONCLUSION AND FUTURE RECOMMENDATION
Experimental results conducted in this study showed the dependency of glove materials selection on the contact conditions to fulfill grip requirements and working conditions for efficient handling and mobility performance. The conclusion could be summarized as follow:
| • | Latex and synesthetic rubber gloves can be recommended to handle dry glasses because both materials displayed the higher values of friction. The reason could be attributed to the contact area and its role to increase or decrease the friction coefficient |
| • | Gloves made of natural leathers can be advised to grip water wetted glasses due to displaying a steady ascending frictional manner. This manner could be explained based on the water absorbability of natural leathers interconnected with the triboelectrification concepts |
| • | Natural leather gloves can be nominated to hold oily glasses due to the existed ridges and protrusions on the leather surfaces. These ridges and protrusions work as oil store which it can feed oil back to the sliding surface. Moreover, the absence of the electrostatic charges due to existing oil film had a role too |
REFERENCES
- Voigt, D., A. Karguth and S. Gorb, 2012. Shoe soles for the gripping robot: Searching for polymer-based materials maximising friction. Robot. Autonomous Syst., 60: 1046-1055.
CrossRefDirect Link - Moisio, S., B. Len, P. Korkealaakso and A. Morales, 2013. Model of tactile sensors using soft contacts and its application in robot grasping simulation. Robot. Autonomous Syst., 61: 1-12.
CrossRefDirect Link - Maempel, J., E. Andrada, C. Trommer, A. Karguth, M. Fischer, D. Voigt and S.N. Gorb, 2008. Inspirat-towards a biologially inspired climbing robot for the inspection of linear structures. Proceedings of the 11th International Conference on Climbing and Walking Robots, September 8-10, 2008, Coimbra, Portugal, pp: 207-213.
- Drumwright, E and D.A. Shell, 2011. An evaluation of methods for modeling contact in multibody simulation. Proceedings of the IEEE International Conference on Robotics and Automation, May 9-13, 2011, Shanghai, China, pp: 1695-1701.
CrossRefDirect Link - Varenberg, M. and S.N. Gorb, 2009. Hexagonal surface micropattern for dry and wet friction. Adv. Mater., 21: 483-486.
CrossRefDirect Link - Murarash, B., Y. Itovich and M. Varenberg, 2011. Tuning elastomer friction by hexagonal surface patterning. Soft Matter, 7: 5553-5557.
CrossRefDirect Link - Eksioglu, M. and K. Kizilaslan, 2008. Steering-wheel grip force characteristics of drivers as a function of gender, speed and road condition. Int. J. Ind. Ergon., 38: 354-361.
CrossRefDirect Link - Edgren, C.S., R.G. Radwin and C.B. Irwin, 2004. Grip force vectors for varying handle diameters and hand sizes. Hum. Factors, 46: 244-251.
CrossRefDirect Link - Shih, R.H., E.M. Vasarhelyi, A. Dubrowski and H. Carnahan, 2001. The effects of latex gloves on the kinetics of grasping. Int. J. Ind. Ergon., 28: 265-273.
CrossRefDirect Link - Wimer, B., T.W. McDowell, X.S. Xu, D.E. Welcome, C. Warren and R.G. Dong, 2010. Effects of gloves on the total grip strength applied to cylindrical handles. Int. J. Ind. Ergon., 40: 574-583.
CrossRefDirect Link - Chowdhury, M.A., D.M. Nuruzzaman, A. Kowser, M. Rahman and B.K. Roy et al., 2014. Frictional behavior of polymers sliding against smooth and rough mild steel counter faces. Middle-East J. Scient. Res., 21: 477-486.
Direct Link - Diaz, A.F. and R.M. Felix-Navarro, 2004. A semi-quantitative tribo-electric series for polymeric materials: The influence of chemical structure and properties. J. Electrostatics, 62: 277-290.
CrossRefDirect Link - Shoush, K.A., O.A. Elhabib, M.K. Mohamed and W.Y. Ali, 2014. Influence of iron nanoparticles on the triboelectrification of epoxy floorings. Int. J. Scient. Eng. Res., 5: 1306-1312.
Direct Link - Zaini, H., A. Alahmadi, A.S. Ali and W.Y. Ali, 2015. Electric static charge generated from contact of surgical gloves and covers of the cloths in hospitals. Int. J. Mater. Chem. Phys., 1: 323-329.
Direct Link - Mahmoud, M.M., W.Y. Ali and G.T. Abdel-Jaber, 2015. Triboelectrification of polypropylene shoe sliding against polyethylene cover. J. Multidisciplin. Eng. Sci. Technol., 2: 2987-2993.
Direct Link - Mai, K.M., M.I. Khashaba, M.O. Mousa and W.Y. Ali, 2015. Effect of hardness and thickness of recycled rubber tiles on electric static charge generated from their contact and separation with rubber sole. Int. J. Mater. Chem. Phys., 1: 352-358.
Direct Link - Irzmanska, E. and A. Stefko, 2015. Simulation method for assessing the end of service life of gloves used by workers exposed to mineral oils and mechanical factors. Int. J. Ind. Ergon., 47: 61-71.
CrossRefDirect Link
Ivan morato leite Azzari Reply
Hi, I want know the coefficient of static and dynamic friction between nylon and latex.