
Youming Tang
School of Mechanical and Automotive Engineering, Xiamen University of Technology,Xiamen, Fujian, China
Na Lv
School of Mechanical and Automotive Engineering, Xiamen University of Technology,Xiamen, Fujian, China
Liao Yi
School of Mechanical and Automotive Engineering, Xiamen University of Technology,Xiamen, Fujian, China
Hongwu Huang
School of Mechanical and Automotive Engineering, Xiamen University of Technology,Xiamen, Fujian, China
Journal of Applied Sciences
Year: 2014 | Volume: 14 | Issue: 20 | Page No.: 2608-2614







ABSTRACT
In order to improve the two point seatbelt protection level for Middle-school student in domestic school bus, built a simulation model of occupant restraint system in school bus using multi-rigid body dynamics software MADYMO. Then analyzed the injuries of dummy’s head, thorax and leg while it was given the testing acceleration pulse and compared the results including Head Injury Criteria (HIC), thorax 3 msec acceleration and legs’ force to rules value according to standard GB24406-2012. Based on those, optimized the baseline by altering the fixed point of seat belt and the seat cushion angle. The result indicted that rising the seat angle and backward the fixed point of seat belt could decline the children occupant injury in crash and improve the protection level of school bus restraint system.
PDF Abstract XML References Citation
Received: February 05, 2014;
Accepted: May 16, 2014;
Published: July 11, 2014
How to cite this article
Youming Tang, Na Lv, Liao Yi and Hongwu Huang, 2014. Optimization Design for Seat Restraint System of School Bus in Front Impact. Journal of Applied Sciences, 14: 2608-2614.
DOI: 10.3923/jas.2014.2608.2614
URL: https://scialert.net/abstract/?doi=jas.2014.2608.2614
DOI: 10.3923/jas.2014.2608.2614
URL: https://scialert.net/abstract/?doi=jas.2014.2608.2614
INTRODUCTION
In recent years, the accident of school bus occurred frequently across the country and it has become one of the main reasons for primary and middle school student casualties. According to statistical data, a traffic accident take place per 41 sec in China, nearly 40 students are involved in traffic accidents every day. During the period of 2011-2013, the incidence and the number of casualties of school bus accidents have decreased but still are continuoue without end. In order to improve the school bus safety performance, ensure students’ safety, the State Council promulgated and implemented a regulation “School bus safety management” in April 2012 for the first time and issued “Special school bus safety standards” in May of the same year. In foreign countries, school bus is one of the safest transportation tool, compared to other vehicles, it have better protection performance to occupants because of its size, weight, better bus body joint strength, stronger roof structures and fuel systems (NHTSA, 1999).
After collision, a second collision will occur between occupants and vehicle constructs which is the main cause of occupant injury. In order to reduce occupant injury in the process of collision, people have studied on the seat position (Nukenine et al., 2011), belt webbing characteristics, tensioner, buckle (Thorbole and Renfroe, 2013), airbag explossion time (Potula et al., 2012), volume and other factors (Acar and Esat, 2010). Also, occupant restraint system, such as safety belt and airbag, have been intelligently and widely used in home and abroad counties, occupant protection technology has become mature in vehicle. Studies on the school bus were mainly focused on the structure crashworthiness (Hinch et al., 2002), rollover performance (Jiang et al., 2010) and so on and now Chinese school bus seat usually use two point belts which have less measures to protect occupants. In order to increase the protective effect on occupant with limited conditions in school bus collision, this study present a model based on a school bus seat, built a Multi-rigid Body Collision Simulation Model, carried out a research on the impact of seat belt fixed point and the seat angle on child occupant injury.
CHILD OCCUPANT RESTRAINT SYSTEM MODEL OF SCHOOL BUS
The Multi-rigid Body Dynamics Model is built based on occupant characteristics, environment, restraint systems and collision state, connected by joints which can be used to animate occupants’ kinetic and dynamic response in collision. The MADYMO is a software combines multi-rigid body and dynamic finite element calculations, it contains strictly validated dummy database which have good bio-fidelity and provide reliable injury value in simulation. The MADYMO can be used to study the occupant restraint system integration and optimization design and collision safety performance of automobiles. In the conceptual design period, MB method is used to build a model quickly and effectively, in the product structure design period, FE method is used to build a detailed model. This school bus occupant restraint system model is built by MB+FE method with MADYMO.
Analysis theory: A rigid body i in space. The position of the origin of the body local coordinate system relative to the origin of the reference space coordinate system is given by the vector ri. The orientation of the body local coordinate system relative to the reference space coordinate system is defined by the direction cosine matrix Ai. Let the vector from the origin of the body local coordinate system to an arbitrary point P on body i be given by xi. The position vector Xi of this point in the reference space is given by the following equation (MADYMO, 2002):
| (1) |
This equation can be written in the matrix form:
| (2) |
or:
 | (3) |
where, Xi and ri are column matrices containing the components relative to the reference space coordinate system of the vectors Xi and ri, respectively. The Xi is a column matrix containing the components of the vector xi relative to the body local coordinate system. The direction cosine matrix Ai relates xi to Xi. The first time derivative of Eq. 3 equals to:
| (4) |
where, ωi is the angular velocity vector of body i.
The second time derivative of Eq. 3 equals to:
| (5) |
Due to external force for any single rigid body can be simplified as a force Fi crossing the center of gravity and a torque Ti, the motion equation of rigid body i relative to its barycenter is:
| (6) |
| (7) |
Where:
| mi | = | Quality |
| Ji | = | Inertia tensor relative to centroid |
| Fi | = | Resultant force vector |
| Ti | = | Resultant torque vector relative to centroid |
| ωi | = | Angular velocity vector |
Calculation of multi-rigid body is an integration of many single rigid body motion equation, virtual work principle can be used to calculate the joint force and torque between rigid bodies. Multiply Eq. 6 and 7 with position variation δri and the range of variation by δπi and then added them together, we get following equation:
| (8) |
If the joint constraint is not destroyed, we can get the second time derivative of joint degrees of freedom according to the virtual work principle:
| (9) |
where, Yij is the column matrix of linear and angular acceleration component in coordinate system of the parent rigid body i, Mij and Qij depend on the rigid body’s inertia and instantaneous geometric position, Qij is also related to the instantaneous velocity and load of the system. Calculations begin with Eq. 9 branched endpoint in open-loop rigid body system, we can solve the whole system.
Different integral methods can be used to solve the motion Eq. 7 with various external force and acceleration field as the initial condition, such as improved Euler method, fixed time step of fourth order Runge-Kutta or variable time step fifth order Runge-Kutta method (Teng et al., 2008).
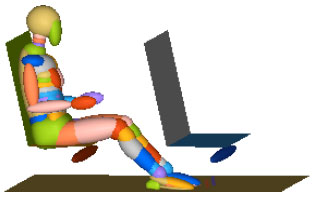
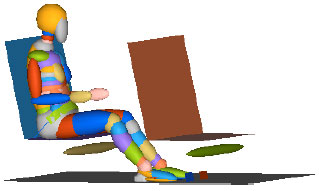
Vehicle model: The model consists of floor, seat cushion, seat back, seat frame and the foot stop. After measuring the geometric position of seat, the floor, seat cushion, seat back and the foot stop were defined as rigid plane, the seat frame was defined as rigid ellipsoid surface. Multiple rigid bodies are connected by joints in vehicle model which can simulate the body deformation in collision. Vehicle model is shown in Fig. 1 and 2.
Dummy model: The MADYMO provides abundant dummy model, hybird III 5 percentile female ellipsoid dummy was chosen to simulate middle student according to special strength for school bus students seat system and vehicle fasteners” (GB24406, 2012).
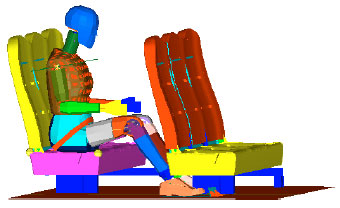 | |
| Fig. 1: | Vehicle finite element model |
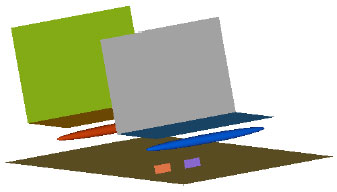 | |
| Fig. 2: | Vehicle rigid model |
Calling the included statement, the dummy model is shown in Fig. 3. There are two methods to locate the dummy (1) Visual observation, adjusting the dummy position by directly inputting dummy positional parameters and (2) Pre-simulation method, initial adjusting dummy position to make sure that there is no contact between seat, floor and dummy, only to achieve a state of static equilibrium under the action of gravity, then input the position of joints into MADYMO model. This model combined these two methods. After pre-simulation, the dummy position is shown in Fig. 4.
Seat belt model: The MADYMO includes three methods to build the seat belt model: Spring damper unit modeling, finite element modeling, spring damping element with finite element modeling (Ruhai et al., 2012). This seat belt model combines the spring damper modeling with finite element modeling. The part of the belt interacting with the dummy was built by finite element modeling, simulating the sliding in the body in all directions; the rest was built as MB seatbelt, to increase some slack into belt.
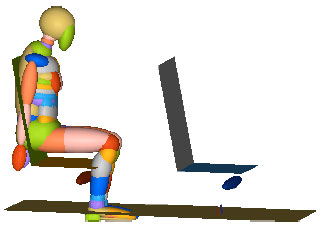 | |
| Fig. 3: | Redeployment of dummy model |
 | |
| Fig. 4: | Dummy position after pre-simulation |
 | |
| Fig. 5: | Before pre-simulation of belt |
A pre-simulation is needed to ensure the belt position (MADYMO 2002), when the safety belt is not in contact with dummy, as shown in Fig. 5, put a small force to the end of the belt and the belt will take a geodesic path across the dummy surface, so as to get the node coordinates of FE safety belt. After pre-simulation, the belt position is shown in Fig. 6.
There are two contact methods in the model, contact MB_MB was used between dummy and vehicle body, contact MB_FE was used between dummy and finite element belt (Meyer et al., 2009). In addition, two acceleration fields were defined in dummy: One is vertical gravity field and the other one is the horizontal acceleration field which is the reverse curve of the body deceleration measured in vehicle collision test, as shown in Fig. 7. Thus, a complete school bus simulation model for front impact was built.
SIMULATION AND OPTIMIZATION
Simulation results: After simulation calculation, we got a series of curves about the head, thorax acceleration and leg pressure, as the reference to GB24406-2012 (GB24406, 2012) to test the model, we chose the head HIC value, chest acceleration and leg axial pressure as the occupant injury criteria. The experimental results are shown in Fig. 8.
 | |
| Fig. 6: | After pre-simulation of belt |
From the Fig. 8a, dummy head acceleration appears two peaks, the first peak appears at 54 msec. Compared with animation, we know that when the feet contact with the foot stop on the ground at 54 msec, dummy lower limbs don’t move forward and the uppers move forward continually, so the head acceleration reaches a smaller peak 25.9 g, thorax acceleration also appear a maximum peak 35.5 g. Seat belt plays an important role in dummy protection during the period of the first and second peak of head acceleration, when the head contact with the frontal seatback, head acceleration reaches the maximum 43.4 g, meanwhile, the leg axial pressure reaches the maximum value 0.746 kN.
 | |
| Fig. 7: | Acceleration curve |
 | |
| Fig. 8(a-c): | Simulation curves. Resultant acceleration of (a) Head, (b) Thorax and (c) Leg X axial pressure |
Based on the simulation curves, we calculated the head HIC value, thorax 3 msec acceleration and the maximum axial pressure of leg according to the occupant injury indexes in GB24406 (2012). The Table 1 shows the comparison between simulation injury values and injury indexes.
Discovered by the above comparison, dummy head HIC and leg axial pressure are in the safety standard range, thorax 3 msec acceleration reached 35.48 g which means that the collision caused a heavy damage to the thorax and we need to optimize the parameters of the restraint system, so as to reduce the damage to the passenger in the process of collision.
Parameters optimization: After simulation analysis, we found thorax to be severely injured, therefore the optimization aim to reduce occupant thorax injury while ensuring occupant head and leg injuries in a reasonable bounds. In the collision process of school bus, seat belt positon and seat play important role in the changing of thorax acceleration, so we considered the safety belt fixing point position (Hu et al., 2013) and the angle between seat cushion and the horizontal plane (Teng et al., 2012) as the optimization parameters of the model and improved the model designation. Thus, we designed 4 optimization schemes shown in Table 2, modified and calculated the model according to the optimization schemes and compared the simulation curve and the calculation results obtained form the optimization schemes with the original solution, as shown in Fig. 9 and Table 3, respectively.
| Table 1: | Comparison of simulation injury values and injury indexes |
 | |
| Table 2: | Optimized design schemes |
 | |
| Table 3: | Comparison results before and after optimization |
 | |
 | |
| Fig. 9(a-d): | Comparison curves before and after optimization. Comparison of the resultant acceleration of (a) Throx and (b) Head. Comparison of axial pressure of (c) Left leg and (d) Right leg |
DISCUSSION AND CONCLUSION
After analysing the before and after optimization results, we found that increasing the seat angle can improve the occupant chest acceleration and head HIC value, it can increase the dynamic friction coefficient between the dummy and seat which limit the movement of dummy hips and lower limbs relative to the seat in the collision process, so in this way dummy’s chest acceleration can be decreased (Teng et al., 2012). But with the increase of the seat angle, although the occupant injury can be improved, head HIC value and leg axial pressure are increased, so the increasing seat angle has an improved influence on occupant thorax and little effect on head and legs. Changing the seat belt fixing point can decrease the thorax acceleration and head HIC value in a certain extent and seat belt further move backward, thorax acceleration, head HIC value and leg axial pressure drop slowly. Therefore in the installation of seat belt on the school bus, the belt fixed point should be installed backward along the x-axis in the reasonable range of installation. Above four kinds of project, the third one is the best improvement scheme.
To sum up, optimizing the safety belt fixed point and seat angle can not only reduces the dummy thorax 3 msec acceleration in the frontal collision process but also reduce the head maximum acceleration and leg maximum axial pressure, compared to the original model and improve the protective effect of the child restraint system in school bus.
This study built a multi-rigid body structure model of school bus seat with software MADYMO with reference to a domestic school bus, carried out a simulation experiment according to the GB24406, (2012). In the simulation result, the occupant’s head and leg injuries were in reasonable range but thorax injury was too serious. In order to improve the thorax injury, we analyzed two factors that influenced the dummy chest acceleration and presented four improvement solutions, the following conclusions were drawn from the optimization schemes:
| • | Increasing the seat cushion angle can reduce the thorax 3 msec acceleration, head HIC value and leg axial pressure to a certain degree |
| • | The seat angle should be increased in a reasonable range, the excessive seat angle will not only hurt the children occupant badly but also affect the seating comfort |
| • | Moving the seatbelt fixed point backward along the X axial can better improve the occupant head, thorax and leg injury |
| • | Along with the distance of seatbelt moving backward increasing, the optimal degree of occupant injury decreases slowly and then we can improve the protective effect of restraint system by changing of other parameters in school bus |
ACKNOWLEDGMENTS
This study was supported by State Key Laboratory of Advanced Design and Manufacture for Vehicle Body of Hunan University and sponsored by National Natural Science Foundation of China, Grant No. 51305374 and 51355001. Open Foundation of State Key Laboratory of Advanced Design and Manufacture for Vehicle Body of Hunan University, Grant No. 31215004. Fujian Natural Science Foundation of China, Grant No. 2012J05103.
REFERENCES
- Acar, B.S. and V. Esat, 2010. A computational investigation on seat belt use for pregnant drivers in airbag equipped automobiles. Proceedings of the ASME 10th Biennial Conference on Engineering Systems Design and Analysis, Volume 3, July 12-14, 2010, Istanbul, Turkey, pp: 157-161.
CrossRefDirect Link - Meyer, A., J.M. Fritz and G.F. Harris, 2009. TRID cranial analysis during rear impact simulation with MADYMO. Proceedings of the 11th ASME Summer Bioengineering Conference, June 17-21, 2009, Lake Tahoe, California, USA., pp: 595-596.
CrossRef - Jiang, C., C.E. Neal-Sturgess and Y. Hu, 2010. Kinematics simulation and head injury analysis for rollovers using MADYMO. Int. J. Crashworthiness, 15: 505-515.
CrossRefDirect Link - Nukenine, S.K.L. and J. Daniel, 2011. Impact of belt use by rear-seat occupants on injury severity of belted drivers in new jersey. Transp. Res. Rec.: J. Transp. Res. Board, 2265: 91-99.
CrossRefDirect Link - Potula, S.R., K.N. Solanki, D.L. Oglesby, M.A. Tschopp and M.A. Bhatia, 2012. Investigating occupant safety through simulating the interaction between side curtain airbag deployment and an out-of-position occupant. Accident Anal. Prevent., 49: 392-403.
CrossRef - Ruhai, G., M. Hu and D. Xu, 2012. Simulation study of bus occupant restraint system in emergency brake. Proceedings of the 5th International Conference of Intelligent Computation Technology and Automation, Volume 2, November 11-12, 2012, Haiko, pp: 392-395.
CrossRef - Thorbole, C.K. and D.A. Renfroe, 2013. An investigation of inertial unlatching of side-release seat belt buckles using computational modelling. Int. J. Crashworthiness, 18: 306-316.
CrossRefDirect Link - Teng, T.L., C.C. Liang, H.Y. Huang and Y.L. Chen, 2012. Effect of vehicle seat on neck injury in rear impact. Adv. Mat. Res., 538-541: 2995-2998.
Direct Link - Teng, T.L., F.A. Chang, Y.S. Liu and C.P. Peng, 2008. Analysis of dynamic response of vehicle occupant in frontal crash using multibody dynamics method. Math. Comput. Model., 48: 1724-1736.
CrossRefDirect Link