
Siti Syahida Mohd. Yasin
Department of Renewable Energy Engineering, Faculty of Petroleum Engineering and Renewable Energy Engineering, Universiti Teknologi Malaysia, Johor, Malaysia
Nik Mohd Asraf Nik Aziz
Department of Renewable Energy Engineering, Faculty of Petroleum Engineering and Renewable Energy Engineering, Universiti Teknologi Malaysia, Johor, Malaysia
Zainal Zakaria
Department of Renewable Energy Engineering, Faculty of Petroleum Engineering and Renewable Energy Engineering, Universiti Teknologi Malaysia, Johor, Malaysia
Ariffin Samsuri
Department of Renewable Energy Engineering, Faculty of Petroleum Engineering and Renewable Energy Engineering, Universiti Teknologi Malaysia, Johor, Malaysia
Journal of Applied Sciences
Year: 2014 | Volume: 14 | Issue: 12 | Page No.: 1265-1270







ABSTRACT
Gas lift optimization has been a point of interest for some decades in order to increase production in oil fields. Despite that there are still lacks of user friendly software in gas lift optimization. The ultimate goal of this study is to develop user friendly program using commercial Computational Fluid Dynamics (CFD) software for optimization of continuous flow gas lift for single well. GAMBIT 2.3.16 was used for modelling the tubing string prior the simulation process. Two-phase CFD calculations using Eulerian–Eulerian model and commercial CFD package FLUENT 6.0 were employed to calculate the gas-liquid flow in the string. The depth and the rate of gas injection were the main parameter tested. The simulation results showed that the highest velocity of flowing fluid was observed when the gas was injected at the lowest point, which is at 5 m from the casing shoe in this study. The velocity of flowing fluid was increased by 1.7% when the gas injection rate increased 20%. This interrelationship was observed with regard of the decrease in liquid column density. CFD is capable in aiding faster continuous flow gas lift optimization process.
PDF Abstract XML References Citation
Received: April 05, 2013;
Accepted: April 09, 2013;
Published: April 10, 2014
How to cite this article
Siti Syahida Mohd. Yasin, Nik Mohd Asraf Nik Aziz, Zainal Zakaria and Ariffin Samsuri, 2014. A Study of Continuous Flow Gas Lift System Using CFD. Journal of Applied Sciences, 14: 1265-1270.
DOI: 10.3923/jas.2014.1265.1270
URL: https://scialert.net/abstract/?doi=jas.2014.1265.1270
DOI: 10.3923/jas.2014.1265.1270
URL: https://scialert.net/abstract/?doi=jas.2014.1265.1270
INTRODUCTION
Global demand on petroleum was never decrease. Since it is finite and scarce natural resources, petroleum industry players are looking forward for more efficient technologies in all aspects of optimum production. During initial stage of production, the bottom-hole pressure (BHP) in the oil reservoir is sufficient to force the flow of oil to the surface naturally. However, as time goes by, the internal pressure of depleted reservoir can force only a fraction of it. Thus, the use of artificial technique becomes essential.
Continuous flow gas lift being one of the most economic artificial lift method employed in offshore operations worldwide since it is flexible in its production rates, very effective in a wide range of operating condition as it is able to handle corrosive fluids, suitable for high gas oil ratio, high temperature wells, high water cut offshore well (Mahmoud Safar et al., 2011) and compatible with sand production. Other than that, continuous flow gas lift technique required less maintenance compared with other alternatives (Ayatollahi et al., 2004; Naguib et al., 2000).
The main idea in continuous flow gas lift system is that by compressing gas at the surface and injecting it as deep as possible into the well to reduce the density of the well fluid and the hydrostatic pressure loss along the liquid flow path. The reduction of pressure drop in the well caused the pressure in the bottom becomes sufficiently low to continue production for low producing and non-producing well (Mahmoud Safar et al., 2011; Aamo et al., 2005; Szucs and Lim, 2005).
From a production technologist’s point of view, if the continuous flow gas lift system has already been installed, the left over question will be focus on the maximum production of oil that could be achieved and the amount of gas required in maintaining the maximum production. In contrast, if the continuous flow gas lift system has not been installed, the problem will be focused on determining the optimal position of the injection point in order to maximize the oil production. Obtaining the optimum gas injection rate is important because although oil production increase as gas injection increased, injection of excessive gas not only will reduce production rate but also increase the operation cost due to high gas prices and compressing costs (Buitrago et al., 1996; De Souza et al., 2010).
Due to this situation, many researches as well as oil operators are working hard to develop a procedure to optimize the lift gas in continuous flow gas lift, both in design and operating phase to produce a well or a group of wells with optimal economic point and at the same time, enhancing oil production (Kanu et al., 1981). In 1981, a method of equal slope allocation under both limited and unlimited gas supply was developed to allocate a total amount o f gas at the optimal economic point for a group of wells (Kanu et al., 1981). Fifteen years later, the same results were utilized to establish a new tool to optimize gas distribution for a group of wells without restriction in a well response and the number of wells in the system (Buitrago et al., 1996). As gas lift optimization is an interesting area that can be improved, many researchers explored this problem in determining the optimal operational conditions to yields maximum total oil production rate for single well models (Fang and Lo, 1996) and multiple wells model (Alarcon et al., 2002; Ray and Sarker, 2007; Saepudin et al., 2010), either the gas supply is limited (Saepudin et al., 2010) or unlimited (Khamehchi et al., 2009a) using different formulations such as a linear programming (Fang and Lo, 1996), non-linear programming (Alarcon et al., 2002), mixed integer linear programming (Kosmidis et al., 2005), dynamic programming (Camponogara and Nakashima, 2006), genetic algorithms (Ray and Sarker, 2007; Khamehchi et al., 2009b; Saepudin et al., 2010), Integrated Asset Model (Fernando et al., 2007), Evolutionary Algorithms (Ray and Sarker, 2008), Artificial Neural Networks (Khamehchi et al., 2008) and Ant Colony Approach (Zerafat et al., 2009).
In the recent years, due to progress in computer hardware and software and consequent increased of the calculation speed, Computational Fluid Dynamic (CFD) technique has been powerful and effective tools to understand the complex hydrodynamics of gas liquid two-phase flows and it has been successfully tried and tested in many industries including the oil and gas industry. CFD has been used to model fluid behavior in reservoirs, near wellbores and wells, sand transport, coupled mechanical modeling of failing wellbores and gas well clean-up. Most recently, CFD has mainly been used to model fluid flow in surface pipelines in order to examine the fluid flow through and around tubing and equipment (Alizadehdakhel et al., 2009; Byrne et al., 2011).
Thus, in this study, the CFD modelling was used to propose a framework for the analysis of gas-liquid flow model in continuous flow gas lift system. Variation of injection depth on vertical upward flowing tubing string and the effect of injection gas rate will be considered and discussed.
MATERIALS AND METHODS
Prior to simulation, the tubing string was modelled by GAMBIT 2.3.16 with a few assumptions and boundary condition that will be described detailed in next section. Then, the simulation process was carried out with FLUENT 6.2.16.
Modelling the tubing string: The model of tubing string for artificial gas lifts was modelled by GAMBIT 2.3.16 with all assumptions and boundary condition being made as described in the next section. The study consists of a well tubing string which crude oil and hydrocarbon gas enters at the specific injection port at certain depth in the domain. The primary phase in the system (crude oil) was entered at certain pressure define as BHP while the injected gas was being well specify by determine the specific rate needed to produce certain volume of oil. Table 1 shows the relevant information and properties of the well while the properties of the crude oil and hydrocarbon gas showed in Table 2.
Based on the ability of computer hardware and time constraints, the whole tubing with actual length of 2000 m is impossible to be modelled as infinite iteration process occurs when the length of the tubing specified as the actual length. This factor alone needs a very high numbers of meshes due to very large difference between length of pipe and its diameter.
Only the lowest 30 meters of the well was modelled with proper assumptions being created. It was assumed that the liquid crude oil and injected gas was well mixed before reaching height of 30 meters. Quadrilateral/hexahedron mesh could be used in tubing till reaching the outlets. However, the section at the gas inlet or specifically at the gas injection section is highly unstructured. Hence, Triangle/Tetrahedron was use in this particular section based on the compatibility of this mesh type. Coarse mesh size of 0.01 m was used in order to have 4480 cells (14134 faces). At the walls, slip boundary condition was imposed. The tubing was modelled as an open system, so the pressure in the outflow space above the initial tubing was set equal to the ambient pressure (0.1 MPa). The development of the model was shown in Fig. 1.
Model assumptions and limitations: In order to proceed with the simulation, several assumptions need to be applied in this study based on the software criteria and limitations as stated below:
| • | The atmospheric pressure was 0.1 MPa while the gravitational acceleration was 9.81 m s-1 |
| • | Negligible of formation gas in volume and pressure |
| • | Injection gas pressure was higher than the BHP as it was low in most low production wells where gas injection was needed |
| • | The crude oil and hydrocarbon gas entered the tubing were assumed uniformly distributed at the inlet cross section while the mixture of oil and hydrocarbon gas was assumed to be homogenous mixture before reaching the model boundary maximum length at 30 meters. This indicates a higher position of gas injection from well bottom was applied where the flowing BHP was high enough to drive the oil to a higher location in the tubing |
| • | Radius of gas inlet was set at 1/3 of radius of tubing size since varying the tubing size without careful calculations will lead to divergence in iteration |
| • | The well was packed off in this study due to packerless wells simulations require set up of a porous zone or oil zone outside the well bottom boundary |
| • | Single string of gas injection was used to avoid the complicated multi phase flow and existence of secondary flow |
| Table 1: | Specification of production well |
 | |
| Table 2: | Properties of component |
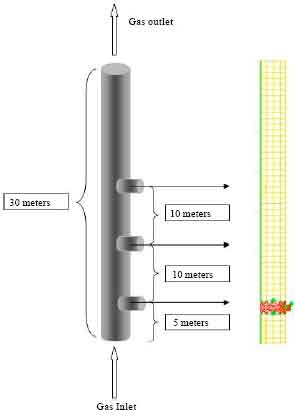 | |
| Fig. 1: | Geometry of tubing string |
Simulation process: The commercial CFD software package, FLUENT 6.2.16, which is based on the 3D segregated 1st order implicit solver approach, was used for solving the set of governing equations for multi phase calculations.
| Table 3: | Various configurations of model used in simulation |
 | |
Using the segregated solver, the flow of multi phase flow of liquid and gas should be accept as in unsteady state. The standard k-ε mixture multi phase model was used to treat turbulence phenomena in both phases. Energy Equation is turned off. Mixture Model was used in this simulation for multi phase flow modelling. The simulation was focus more on the velocity magnitude of the flowing fluids. Both contour and vector of the fluid will be process from the result and the residual plot is turn on during the simulation. The modelling and simulation involves following steps to ensure the result convergence thus valid to be used:
| • | Generation of suitable grid system |
| • | Conversion of governing equation into algebraic equations |
| • | Selection of discretization schemes |
| • | Formulation of the discretized equation at every grid location |
| • | Formulation of pressure equation |
| • | Development of a suitable iteration scheme for obtaining a final solution |
To achieve the objective, the simulation was run with three difference depths of injection rate which were 5 m, 15 and 25 m from casing shoe. After the ideal depth of gas injection was determined, the gas injection rates were then varies at 1.747, 2.184 and 2.621 m sec-1 to monitor the effect of the varying gas injection rates in oil production. The liquid velocity of the flowing fluid in the tubing string for this simulation was constant at 2.568 sec-1. Table 3 summarizes the different geometrical configurations used in the present work.
RESULTS AND DISCUSSION
Effect of the depth of gas injection: The efficiency of a continuous flow gas lift system was highly influenced by the depth of the gas injection. The velocity of the liquid phase increase when gas was injected at particular depth. The flowing fluid velocity of the gas-liquid multi phase when 2.184 m sec-1 of gas was injected at 5, 10 and 25 m from the casing shoe were given in Fig. 2.
From Fig. 2, it shows that the lowest injection point at 5 m has highest velocity of flowing fluids, which were 3.0181 m sec-1 while the higher gas injection point (15 m and 25 m) resulted in 2.9157 m sec-1 and 2.8339 m sec-1 of velocity of flowing fluids.
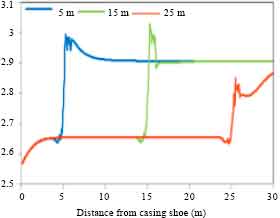 | |
| Fig. 2: | Effect of depth of injection to the oil vertical upward flow |
 | |
| Fig. 3(a-c): | Contour of hydrostatic pressure for different injection points: (a) 5 m (b) 15 m and (c) 25 m |
It was clearly shows that the higher the gas injection point, the lower the velocity of flowing fluid. When the depth of injection of gas increased, more hydrostatic pressure of the heavier fluid (and gas) column was taken off of the formation thus reducing the BHP and increasing production (Blann and Williams, 1984; Lea et al., 2008). Based on the contour of hydrostatic pressure inside each column (Fig. 3), it was clearly shows that for all columns, the hydrostatic pressure at the bottom was higher when compared to the top of the column. This increment was happened as hydrostatic pressure increased proportionally with depth of wellbore due to the increasing weight of column fluid exerting downward force from the above.
In actual oil field, the gas lift system was installed as deep as possible (Takacs, 2005). The BHP needs to lift the lesser oil volume in the tubing. The deeper the gas injection point, the lower the BHP can be forced. The relationship was not linear but apart from in highly deviated wells, deeper gas lift was not inordinately better. This is because at deeper depths, more reservoir gas was in solution and lift gas therefore has a greater effect. The benefit of injecting gas near the bottom of the most wells can be summarized as (1) More pressure drawdown at the reservoir, (2) Greater total fluid production rates, (3) Less gas volume required, (4) Less downhole equipment and (5) When using a gas injection pressure that enables near-maximum depth injection will unload a well deeper as compared to lower pressure (Blann and Williams, 1984).
Effect of gas injection rates: The quantity of injected gas is a critical variable. The function of injection gas in continuous flow gas lift well is two folds. First, it must aerate the fluid sufficiently to unload the well column down to an operating point. Then, it must reduce the density of the fluid column in order to produce fluid to the surface. However, the fluid production will depends on how much the gas was injected into the column as lower value of injected gas can reduce significantly the production and higher value can increase the operational costs. Figure. 4 shows the effect of gas injection rate at when the gas injection rate varies at 1.747, 2.184 and 2.621 m sec-1. All the gas was injected at 5 m of depth and the velocity of the liquid in the column was constant at 2.568 m sec-1. At minimum rate of gas injection, which was 1.747 m sec-1, the velocity of flowing fluid was 2.8567 m sec-1. The velocity of flowing fluid was keep increasing to 2.90577 and 2.9565 m sec-1 when the rate of gas injection was increased to 2.184 and 2.621 m sec-1. Basically, the injected gas will significantly increases the rate of oil production as the gravitational gradient was reduced. The existence of the gas reduced the hydrostatic pressure in the fluid column, in resulted of reduced weight, thus enable the BHP to accelerate the velocities of the flowing liquid vertically upward. This phenomenon should explain the 1.7% increment of the velocity of flowing fluid when the gas injection increased every 20%.
Generally, when a fluid flow through a vertical duct, same as in the wellbore; it will experience pressure losses which can be divided into three different components: 1) Static pressure loss, 2) Dynamic pressure loss and 3) Kinetic pressure loss. For wellbores, the kinetic losses are generally minimal and can be ignored. Thus, the equation that describes the overall pressure losses in the wellbore can be expressed as the sum of two terms:
| (1) |
Eq. 1 is the simplified form of Bernoulli’s equation.
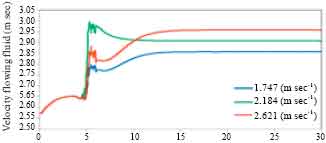 | |
| Fig. 4: | Effect of gas injection rate |
The static pressure losses is a function of the fluid mixture density that exists in the wellbore while the dynamic losses are due to a combination of the particular flow regime that the fluid can be considered to be travel in as well as the composition of the fluid (of gas, liquid and condensate). Thus:
| (2) |
In gas lift system, when the gravity acceleration, g and the height of the domain is fix at a constant values, h the only terms that can be manipulate is the density, ρ. From the literatures, this is the main cause of introducing gas phase to the flow, where gas phase does actually have lesser density compare to the liquid phase. Thus, it reduces the density of the produced fluid in the tubing. This results in a reduction of the elevational component of the pressure gradient above the point of gas injection and lower down the BHP. Lowering the BHP then increases reservoir drawdown and thus production rate (Kanu et al., 1981).
Such increments have previously been detected for various wells (Fernando et al., 2007; Kanu et al., 1981). However, this effect is eventually offset by increasing frictional losses with increasing injection gas. This is due to in term of the overall pressure gradient, the trade-off to the increased presence of gas is an increased frictional pressure gradient. When the rate of injection gas keeps increasing, it will reach a point, where the benefits of reducing the elevation gradient equal to the drawback of increasing the frictional gradient. In other words, the gas injection has an optimum limit because too much gas injection will cause slippage, where gas phase moves faster than liquid, so that it reduces oil production. Further increase of injection gas will not only has a detrimental effect on the overall production rate, but would not be economically beneficial as it can increase the operational cost with compression and gas usage (De Souza et al., 2010; Fernando et al., 2007). Thus, an economic analysis must be performed to determine the optimum gas injection rate.
CONCLUSION
It can be concluded that CFD is capable in aiding faster continuous flow gas lift optimization process as it can be used to determine the correct gas injection depth and the optimum flow rate in gas lift system. Gas lift system is able to increase oil production when the required gas volume is injected through the single valve at the deepest possible depth. The oil production rate was increased by 1.3% when the gas injected into the tubing. The simulation results showed that the highest oil production rate was observed when the gas injected at the lowest point, which is at 5 m from the casing shoe in this study. The oil production rate was increased by 1.7% when the gas injection rate varies from 1.747 m sec-1 to 2.621 m sec-1. This interrelationship was observed with regard of the decrease in liquid column density.
ACKNOWLEDGMENT
Researches would like to thank Ministry of Higher Education Malaysia and Universiti Teknologi Malaysia for the Research University Grant (GUP Project No. Q. J130000.7142.01H93) for their support of this research.
REFERENCES
- Ayatollahi, S., M. Narimani and M. Moshfeghian, 2004. Intermittent gas lift in Aghajari oil field, a mathematical study. J. Petroleum Sci. Eng., 42: 245-255.
CrossRef - Aamo, O.M., G.O. Eikrem, H.B. Siahaan and B.A. Foss, 2005. Observer design for multiphase flow in vertical pipes with gas-lift-theory and experiments. J. Process Control, 15: 247-257.
CrossRef - Alarcon, G.A., C.F. Torres and L.E. Gomez, 2002. Global optimization of gas allocation to a group of wells in artificial lifts using nonlinear constrained programming. J. Energy Resour. Technol., 124: 262-268.
CrossRefDirect Link - Saepudin, D., P. Sukarno, E. Soewono, K.A. Sidarto and A.Y. Gunawan, 2010. Oil production optimization in a cluster of gas lift wells system. J. Applied Sci., 10: 1705-1713.
CrossRefDirect Link - Kanu, E., J. Mach and K. Brown, 1981. Economic approach to oil production and gas allocation in continuous gas lift. J. Petroleum Technol., 33: 1887-1892.
CrossRef - Khamehchi, E., F. Rashidi, H. Rasouli, Rasouli and A. Ebrahimian, 2008. A new approach to continuous gas lift optimization using artificial neural networks. J. Eng. Comput.
Direct Link - Khamehchi, E., F. Rashidi, B. Karimi, P. Pourafshary and M. Amiry, 2009. Continuous gas lift optimization using genetic algorithm. Aust. J. Basic Applied Sci., 3: 3919-3929.
Direct Link - Khamehchi, E., F. Rashidi, H. Omranpour, S. Shiry Ghidary, A. Ebrahimian and H. Rasouli, 2009. Intelligent system for continuous gas lift operation and design with unlimited gas supply. J. Applied Sci., 10: 1889-1897.
CrossRef - Kosmidis, V.D., J.D. Perkins and E.N. Pistikopoulos, 2005. A mixed integer optimization formulation for the well scheduling problem on petroleum fields. Comp. Chem. Eng., 29: 1523-1541.
CrossRef - Ray, T. and R. Sarker, 2007. Genetic algorithm for solving a gas lift optimization problems. J. Pet. Sci. Eng., 59: 84-96.
CrossRef - De Souza, J.N.M., J.L. De Medeiros, A.L.H. Costa and G.C. Nunes, 2010. Modeling, simulation and optimization of continuous gas lift systems for deepwater offshore petroleum production. J. Petroleum Sci. Eng., 72: 277-289.
CrossRef - Blann, J.R. and J.D. Williams, 1984. Determining the most profitable gas injection pressure for a gas lift installation. J. Petroleum Technol., 36: 1305-1311.
CrossRef
saad alaa eldeen faiq Reply
thank you