
G. Samara
National Advanced IPv6 Centre, Universiti Sains Malaysia, Malaysia
W. A.H. A. Alsalihy
School of Computer Science, Universiti Sains Malaysia, 11800 Penang, Malaysia
S. Ramadass
National Advanced IPv6 Centre, Universiti Sains Malaysia, Malaysia
Journal of Applied Sciences
Year: 2011 | Volume: 11 | Issue: 14 | Page No.: 2606-2612







ABSTRACT
Vehicular Ad hoc Networks (VANET) is one of the most challenging research areas in the field of Mobile Ad Hoc Networks. In this research, we propose a protocol called Contention Based Broadcasting (CBB) protocol for increasing the emergency message reception and performance, the emergency message will be broadcasted in multi-hop fashion, and the multi-hop forwarders will be selected before the original message is sent. This protocol will enable the emergency information to be propagated for longer distances to warn away vehicles about the danger before reaching it.
PDF Abstract XML References Citation
Received: February 12, 2011;
Accepted: April 27, 2011;
Published: June 07, 2011
How to cite this article
G. Samara, W. A.H. A. Alsalihy and S. Ramadass, 2011. Increase Emergency Message Reception in Vanet. Journal of Applied Sciences, 11: 2606-2612.
DOI: 10.3923/jas.2011.2606.2612
URL: https://scialert.net/abstract/?doi=jas.2011.2606.2612
DOI: 10.3923/jas.2011.2606.2612
URL: https://scialert.net/abstract/?doi=jas.2011.2606.2612
INTRODUCTION
VANET plays an important rule nowadays aiming for safer roads. To increase the road safety VANET allows cars inside the network to exchange warning messages to warn other vehicles about the hazards when it happen. When any danger is detected an emergency message need to be transmitted for a wide range, and for large number of vehicles to let other vehicles aware of the danger before reaching it, this critical information must be sent with high probability, reliability and efficiency.
In order to disseminate the emergency information, vehicle inserts the information into a message and sends this message in broadcast fashion, broadcasting the message to the current network may not guarantee to the message to reach all the vehicle that may get benefit from it due to network considerations or problems like fading or channel jam.
The probability of reception can reach 99% in short distances and can be as low as 20% at half of the communication range (Torrent-Moreno et al., 2004). Vehicles in longer distance seem to be interested in receiving the emergency message as it will reach the danger area after short time due to the high speed of vehicles moving in VANET network, so we need a technique to insure the reception of the message for vehicles in long distances.
In this study we concerned with design a new protocol that will increase the percentage of reception in higher distances which will help the vehicles in the network to avoid the danger.
ANALYSIS OF RELEVANT RESEARCH AREA
Many studies have introduced the idea of how to increase the reception of the emergency message. Mittag et al. (2009) proposed a comparison between sending the information in single-hop transmission at high transmission power and multi-hop transmission at lower transmission power, the comparison aimed to reduce the congestion (load) on the channel caused by periodic safety messages (Beacons). To enable data to reach higher distances authors suggested sending the data in multi-hop at low power, which will decrease the congestion in the network and enable the data to reach higher distances.
Fubler et al. (2003) proposed the Contention-Based Forwarding (CBF) protocol where a node sends a packet as a broadcast message to all of its neighbors. On receiving the packet, neighboring nodes will contend for forwarding the packet by means of waiting for a period of time called contention time. The node having the maximum progress to the destination will have the shortest contention time and will first rebroadcast the packet. If other nodes receive the rebroadcast message, they will stop their contention and delete the previously received message. This protocol mainly proposed for forwarding the periodic safety message (Beacons). The problem of this protocol that there should be a management technique to manage the contention for all the neighboring vehicles, and there is a chance that the nearest vehicle to the sender may not hear the rebroadcast of another vehicle, in this case this vehicle will rebroadcast the message (hidden node problem (Tobagi and Kleinrock, 1975; Khan et al., 2008) causing to broadcast storm problem and making the protocol useless.
Another forwarding scheme proposed by Korkmaz et al. (2004) aiming to maximize the message progress, broadcast storm, hidden node and reliability problems. The protocol assigns the duty of forwarding and acknowledging the broadcast packets to only one vehicle by dividing the road portion inside the transmission range into segments and choosing the vehicle in the furthest non-empty segment without prior topology information. The weakness of this protocol is the high delay as sender and receiver must make request to broadcast (RTB) and clear to broadcast (CTB) handshake to select the forwarder before sending the message and this procedure may occur more than one time to verify the next forwarder.
Mobility prediction method presented by Meng et al. (2008) is not suitable in high mobile network like VANET.
Moreno (2007) and Torrent-Moreno et al. (2009) proposed position-based message forwarding strategy in order to disseminate time-critical safety information, the strategy depends on sending the message in broadcast fashion. All the vehicle receivers are a potential forwarder. Before sending the emergency message, the next forwarder will be selected as the furthest vehicle in the dissemination area. The problem of this strategy that the forwarder itself may not receive the message to forward it due to channel fading as it is very far from the source creating a hidden node problem.
The proposed Emergency Message Dissemination for Vehicular (EMDV) (Torrent-Moreno, 2007) protocol tries to maximize the reception of the emergency message by enabling the furthest vehicle within the transmission range to make the rebroadcasting of the emergency message, choosing one forwarder vehicle is not appropriate in high mobile network like VANET as the position is always changing, and the receiver vehicle may become out of the range when sending the message or simply the receiver can’t receive the message because of the channel problems like jam or denial of service.
PROPOSED NETWORK
Basic idea assumptions: In VANET each vehicle sends to all neighbors a beacon message every 100 ms (White Paper, 2005), helping them to detect and avoid potential dangers, these messages considered as life-critical messages and contain ID, position, direction, speed, time stamp and beacon interval (Abuelela and Olariu, 2009; Samara et al., 2010). Beacons should be received by all the neighboring vehicles with high probability and reliability, we also assume that each vehicle equipped with a GPS device to retain the current position (Wang et al., 2008).
We assume that when a vehicle detecting a danger it will issue an emergency message to warn other vehicles about it. When sending a message, vehicles until the back end of the sender transmission range must receive it, i.e., all the vehicles in the opposite direction of the sender movement located in the coverage. It must be noted that covering the whole area does not guarantee that all the vehicles will receive the message due to channel collisions and fading effects, it must be insured that the emergency message percentage of reception for the network vehicles must be as high as possible.
In order to cover a wider area for message reception some neighboring vehicle is a potential forwarder, each forwarder will contend by means of waiting for a period of time called contention time before making the forwarding.
Preparing to send: Every beacon received by a vehicle provides important information about the sender status, these information could be utilized to form a rich and real time image about current network topology which will help network vehicles to communicate with each other on better way, also it helps to know about the hazards quickly when it happen.
When a vehicle has a problem or detect problem it analyze it to know its kind, is it a life critical or not? the life critical (Safety of Life) messages will be given the highest priority to be processed and sent before any other kind of messages, for this purpose we propose to categorize any emergency message before sending it, to make it easier to the receiver vehicle to recognize the received message importance, Table 1 which contains the code for each category, for example when a vehicle receives two messages contains the category 1 and 5 it will process the message that contains category 1 first, as it contains more important and critical information.
After assigning the message code, the sender should add data to the message like coordination of the hazard or what the receiver should do; we will not discuss this point as it is out of the scope of the study.
The proposed structure of the emergency message sent is given in Fig. 1.
Sending the message in single hop will enable it to reach for number of vehicles and for a limited distance up to 1000 m for the best cases (White Paper, 2005) but this number must be increased to more vehicles aware of the danger before reaching it.
| Fig. 1: | Emergency message illustration. Sen ID: Sender id, Code: Message Code, TS: Time Stamp, Msg ID: Message ID, Data: Data sent, CId: Forwarder Candidate ID, MinP: Minimum boundary, MaxP: Maximum boundary, Hop: Number of message hops |
| Table 1: | Emergency message classification |
 | |
Choosing the next candidate forwarder is a process starts by gathering the information gained from beacons received from neighbors, this information is inserted and ordered into Table 2 NT, NT contains information about neighbors as like: ID, Position, Speed, Heading (direction is the same or deferent), Table 2 provides a fresh information about neighbors and helps to make a quick decision to choose the next forwarder, example on NT in Table 2 based on Fig. 2 scenario.
The sender vehicle chooses the furthest vehicle and assigns it to be the candidate forwarder, forwarding the emergency message will be our option to increase the probability of the reception as the forwarder signal will reach more vehicles on the road and arrive for further distances.
As we mentioned before, choosing one forwarder is not appropriate in high mobile network like VANET, as the forwarder may not receive the emergency message, to solve this problem we propose to divide the network to several segments, vehicles inside the last none empty segment (furthest segment from the sender) will contend for a period of time and check if the candidate forwarder rebroadcasted the emergency message or not, if no one made the rebroadcast, vehicles located in the furthest segment will forward the message.
Vehicles in the last segment, which should be the furthest one, will make the forwarding of the emergency message in case the forwarder fails to receive and forward the message.
Dividing the network to several segments is proposed by Korkmaz et al. (2004), Zhou et al. (2009), Dai et al. (2009) and Fasolo et al. (2006). As in study of Korkmaz et al. (2004) the sender transmission range been divided into 10 segments to make it easier on the sender to discover the last vehicle in none empty segment which will be selected as the next forwarder. For present study, this distance will be the distance between the sender and the forwarder, as the forwarder which is the furthest neighbor maybe away by 900 m not 1000, so the distance area after 900 m must not be considered for better performance, while the distance in study of Korkmaz et al. (2004) is a fixed distance which equals to 1000 m.
| Table 2: | Neighbor Table based on Fig. 2 scenario |
 | |
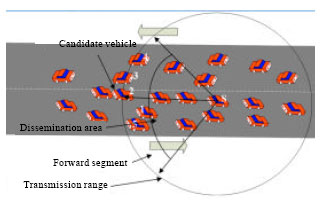 | |
| Fig. 2: | Emergency message sending and transmission range |
To compute the boundaries of the last segment the sender implements the following equations:
| (1) |
| (2) |
| (3) |
| (4) |
Dis is the distance between the sender and the forwarder, SenPos is the sender position, ForPos is the forwarder position, MaxB is the highest boundary (border) for the last segment, MinB is the minimum boundaries (Borders) from where the segment starts, Nmax is the maximum number of the segments, Dif is the length of the segment.
This means that the vehicles located in the area between MinB and MaxB from the sender will be considered as potential forwarders of the emergency message and it will contend to make the rebroadcasting in case that no vehicle made the forwarding.
In some cases the last segment may have insufficient number of vehicles i.e., the number of the potential forwarders must have a threshold; the number could be generated and tested by:
| (5) |
SucPer is the success percentage that the last segment must fulfill before agree on the values of MaxB and MinB, NeiN is the total number of neighbor vehicles in NT.
If SucPer>Nmax% this means that the last segment holds a sufficient number of potential forwarder vehicles, we subtracted 1 vehicle from the result of–as the last segment also holds the preselected potential forwarder.
If the SucPer<Nmax% this means that the area of the last segment should be expanded to include more number of vehicles, this could be done by:
| (6) |
This will double the size of the last segment, and will increase the possibility of increasing the number of the potential forwarders, if the SucPer still < Nmax% we can calculate MinB again by multiplying Dif by 3 and so on, we should know that when the sender decides to broadcasts an emergency message, it should examine the number of neighbors, if the number is more than one neighbor then this protocol could be implemented, if the number of the neighbors is zero, then the sender will broadcast the message without specifying any forwarder, if the number of the neighbors is equal to one then the sender will broadcast the message and specify the forwarder without adding any detail about the boundaries.
Each vehicle inside the last segment computes its contention time and this will be done by the following Eq:
| (7) |
Tc is the contention time that the segment vehicle has to wait before checking the system to see if the emergency message has been rebroadcasted by other vehicle or not, Tslot: Is the system time slot.
Vehicles having largest progress from the sender will have the shortest contention time to wait before testing the channel to make the forwarding, each vehicle will test its progress from the sender by dividing its current position on the maximum distance computed by the sender, the result of this equation will give waiting time for the contending vehicles inside last segment, giving the opportunity for all the vehicles inside the last segment to recover the failure of the chosen forwarder will increase the percentage of sending the emergency message enabling it to reach longer distances.
Enabling just the last segment to contend will eliminate the hidden node problem as all the potential forwarders has a high probability to sense the rebroadcasted message in case any forwarder resent the message as all the potential forwarders located in a small and limited area.
Sending steps:
| • | Sender decides to send an emergency message |
| • | Sender analyzes the danger and decides its code |
| • | Sender creates NT for its neighbors |
| • | Sender decides the next forwarder depending on the furthest vehicle |
| • | Sender computes the last none empty segment boundaries |
| • | Sender creates the message and inserts the values derived from steps 4 and 5 in the message |
| • | Sender broadcasts the message to the network |
Receiving message: Vehicles in VANET receives messages all the time, these messages could be beacon, emergency or service messages. To know the importance of the message received, each message should be analyzed, if the message is holding safety critical information then the message code should be 1 or 2, in this case this message will be given a higher priority to be processed, the receiver vehicle also has to make sure that this message is not received before to eliminate the duplication.
Receiver checks the forwarder id if the current receiver id is the same id of the forwarder, the receiver must start preparing itself to do the forwarding.
If the receiver is not a forwarder, then it must compute the distance between its position and the senders position, to see if the receivers located inside the last none empty segment, if it is located in the last none empty segment it will start contending preparing itself to do the forwarding.
Receiving steps:
| • | Receiver receives a message |
| • | Receiver checks the code if it is 1 or 2 |
| • | Receiver checks if it is not received before |
| • | Receiver checks if its id equals to the forwarder id |
| • | Receiver rebroadcasts the message immediately |
| • | If not a forwarder, Receiver computes the distance between its current position with the sender and see if the distance falls within the minimum and maximum boundary |
| • | Start preparing for forwarding |
Forwarding steps: The forwarding job is done by a limited number of vehicles, we can’t assign this job to all the receiver vehicles to avoid the broadcast storm problem (Tseng et al., 1999) and hidden node problem, the first forwarder should be the first candidate selected by the sender.
The forwarding steps for it will be as follows:
| • | Forwarder waits for a random back off time depending on its Contention Window (CW), the Back off Time used to avoid channel congestion |
| • | Forwarder Senses the channel and sees if this message has been transmitted from others or not |
| • | Forwarder reserves the channel |
| • | Forwarder broadcasts the message |
The contention window for the first candidate forwarder is 15 μs.
Each vehicle inside the last none empty segment is required to contend before trying to send the emergency message and this could be done by the following steps:
| • | Vehicle computes CW depending on |
| • | Vehicle contends for a random Back off time depending on its Contention Window (CW) |
| • | Vehicle Senses the channel and see if this message has been transmitted from others or not |
| • | Vehicle reserves the channel |
| • | Vehicle broadcasts the message |
Simulation results: In order to test correctness of our protocol we made the simulation using the commercial program Matlab®, we have selected the use of Matlab as the version R2010b provides a complete and almost real environment for VANET, http://www.mathworks.com/products/vehicle-network/) that can simulate the VANET channel by using Kvaser and Vector Drivers (http://www.vector.com/vi_canoe_en,,223.html?markierung=canoe), we have created the messages and signals using CANoe Tool (http://www.vector.com/) that is dedicated to manage the DBC (Database) files, we also used AWGN channel to add noise to the signal, the distribution used is Nakagami distribution.
Parameters used in present simulation are summarized in Table 3; all the simulations in this study will adopt these parameters.
In present simulation we have neglected the fair power sharing for beacons factor as we assumed that the power is constant for all the sent messages.
We made our simulation for 10 sec including 200 vehicles in 2 km road consisting of 3 lanes.
The result could be seen in Fig. 3, 4 and 5.
First we have simulated our protocol CBB and tested it in terms of probability of emergency message reception and we compared its performance against EMDV (Moreno, 2007) protocol.
| Table 3: | Simulation configuration parameters |
 | |
 | |
| Fig. 3: | Probability of message reception of emergency message with respect to the distance to the sender |
The results show that both of the protocols can increase the distance and performance of the emergency message, but we have found that CBB can achieve better performance after the first 1000 meter distance which represents the DSRC communication range for the sender, in the last meters of the communication range we can see that the signal is getting to be very weak, but when the forwarder takes the message the signal again getting to be stronger and enabled it to reach higher distances, the difference between CBB and EMDV that after several tries CBB never fails to rebroadcast the emergency message, but EMDV failed in some cases.
We also tested the CBB protocol in terms of the channel collision, we saw that the channel still almost the same during the system performing the simulation, but after a period CBB causes slightly more congestion to the channel as it guarantees to distribute and increase the message reception more than EMDV for longer distances (Fig. 4).
We simulated the delay for sending the whole journey for the message, i.e., the delay for broadcasting the original message and rebroadcasting, the delay results show that the CBB after several broadcasting attempts and during the time has a slightly higher delay as the EMDV just have a delay on the original message broadcasting, but the delay computed for CBB is the delay for broadcast and rebroadcast the emergency message, that’s why the delay for CBB is higher, the delay computed in μs.
The delay computed in this simulation is accumulated for more than one message.
 | |
| Fig. 4: | Collision measured after sending the emergency message during time |
 | |
| Fig. 5: | Delay measured after sending the emergency message during time |
CONCLUSION AND FUTURE WORK
We presented in this study an emergency message broadcasting protocol called Contention Based Broadcasting (CBB) protocol which enables the emergency message to be propagated for higher distances to warn the away vehicles about the danger, in the simulation we compared the CBB with the EMDV and the results show that CBB makes better performance for longer distances in terms of emergency message reception, we also found CBB scores a little bit higher collision as the message reception for it is higher during the time, the simulation also showed that for some times the EMDV is low in delay as it is not making the forwarding all the time. In our future work we will test and enable automatic adjustment for the signal power and see its effect on the channel performance.
ACKNOWLEDGMENT
This paper is financially supported by Institute of Postgraduate Studies (IPS) Fellowship Scheme, Universiti Sains Malaysia (USM). We also would like to thank Mr. Mostafa Taha from Electrical Engineering Dept. Assiut University, Egypt for his valuable assist in the simulation.
REFERENCES
- Fasolo, E., A. Zanella and M. Zorzi, 2006. An effective broadcast scheme for alert message propagation in vehicular ad hoc networks. Proceedings of IEEE International Conference on Communications, Volume 9, June 11-15, 2006, Istanbul, Turkey, pp: 3960-3965.
CrossRef - Korkmaz, G., E. Ekici, F. Ozguner and U. Ozguner, 2004. Urban multi-hop broadcast protocol for inter-vehicle communication systems. Proceedings of 1st ACM International Workshop on Vehicular ad Hoc Networks, October 1, 2004, Philadelphia, PA., USA., pp: 76-85.
CrossRef - Samara, G., S. Ramadas and W.A.H. Al-Salihy, 2010. Safety message power transmission control for vehicular ad hoc networks. J. Comput. Sci., 6: 1056-1061.
CrossRefDirect Link - Fubler, H., J. Widmer, M. Kasemann, M. Mauve and H. Hartenstein, 2003. Contention-based forwarding for mobile ad-hoc networks. Ad Hoc Networks, 1: 351-369.
Direct Link - Tobagi, F. and L. Kleinrock, 1975. Packet switching in radio channels: Part II�the hidden terminal problem in carrier sense multiple-access and the busy-tone solution. IEEE Trans. Commun., 23: 1417-1433.
CrossRef - Torrent-Moreno, M., D. Jiang and H. Hartenstien, 2004. Broadcast reception rates and effects of priority access in 802.11-base vehicular ad hoc networks. Proceedings of the 1st ACM International Workshop on Vehicular Ad Hoc Networks, Oct. 1, ACM Press, Philadelphia, PA., USA., pp: 10-18.
CrossRef - Tseng, Y.C., S.Y. Ni, Y.S. Chen and J.P. Sheu, 1999. The broadcast storm problem in mobile ad hoc network. Wireless Networks, 8: 153-167.
CrossRef - Torrent-Moreno, M., 2007. Inter-vehicle communications: Assessing information dissemination under safety constraints. Proceedings of the 4th Annual Conference on Wireless on Demand Network Systems and Services, January 24-26, 2007, IEEE, Oberguyrgl, pp: 59-64.
CrossRef - Torrent-Moreno, M., J. Mittag, P. Santi and H. Hartenstein, 2009. Vehicle-to-vehicle communication: Fair transmit power control for safety critical information. IEEE Trans. Vehicular Technol., 58: 3684-3703.
CrossRef - Meng, L., W. Fu, Z. Xu, J. Zhang and J. Hua, 2008. A novel Ad hoc routing protocol based on mobility prediction. Inform. Technol. J., 7: 537-540.
CrossRefDirect Link - Dai, Z., Z. Li, B. Wang and Q. Tang, 2009. An energy-aware cluster-based routing protocol for wireless sensor and actor network. Inform. Technol. J., 8: 1044-1048.
CrossRefDirect Link - Wang, Y., T. Liang, X. Yang and D. Zhang, 2008. Scalable and effective cluster based routing algorithm using nodes location for mobile Ad Hoc networks. Inform. Technol. J., 7: 958-971.
CrossRefDirect Link - Khan, I.A., E.Y. Peng, N. Javaid and H.L. Qian, 2008. Angle-aware broadcasting techniques for wireless mobile Ad hoc networks. Inform. Technol. J., 7: 972-982.
CrossRefDirect Link - Zhou, L., G. Cui, H. Liu, D. Luo and Z. Wu, 2010. NPPB: A broadcast scheme in dense VANETs. Inform. Technol. J., 9: 247-256.
CrossRefDirect Link