
S. Krishna
Department of Mechanical Engineering, Universiti Teknologi PETRONAS, Bandar Seri Iskandar, 31750 Tronoh, Perak, Malaysia
T. Nagarajan
Department of Mechanical Engineering, Universiti Teknologi PETRONAS, Bandar Seri Iskandar, 31750 Tronoh, Perak, Malaysia
A. M. A. Rani
Department of Mechanical Engineering, Universiti Teknologi PETRONAS, Bandar Seri Iskandar, 31750 Tronoh, Perak, Malaysia
Journal of Applied Sciences
Year: 2011 | Volume: 11 | Issue: 10 | Page No.: 1749-1755







ABSTRACT
The purpose of this study is to review the current application areas of Pneumatics Artificial Muscle (PAM) actuator. This article analyses the result of the ongoing theoretical and experimental research on the operational behavior of pneumatic muscle such as muscle structure, as well as data on the generated forces. The speed of response of PAM actuator mostly depends upon its shape and size, pressure inputs and outputs. All these factors have impact on the overall force which is generated by the PAMs. The force generated by PAM purely depends on the rate of pressure added and removal from the actuator and is contractile in nature upon inflation. PAM actuators find wide applications in various facets of robotic equipments and industrial automation. They are easy to manufacture, low cost and can be integrated with human operations without any large scale safety requirements.
PDF Abstract XML References Citation
Received: October 22, 2010;
Accepted: November 01, 2010;
Published: April 18, 2011
How to cite this article
S. Krishna, T. Nagarajan and A. M. A. Rani, 2011. Review of Current Development of Pneumatic Artificial Muscle. Journal of Applied Sciences, 11: 1749-1755.
DOI: 10.3923/jas.2011.1749.1755
URL: https://scialert.net/abstract/?doi=jas.2011.1749.1755
DOI: 10.3923/jas.2011.1749.1755
URL: https://scialert.net/abstract/?doi=jas.2011.1749.1755
INTRODUCTION
The braided pneumatics actuator was invented by McKibben to help the movement of polio patients in 1950. They are also called McKibben muscles or artificial muscles powered by the compressed air (Laksanacharoen, 2004). It was in 1958 that R.H Gaylord discovered a pneumatics actuator which was used as the original applications such as, a door opening arrangement and an industrial hoist. These muscles were made from pure rubber latex, covered by a double helical braided wire which would contract when expanded radially. A Pneumatic Artificial Muscle (PAM) is a pneumatic actuator for converting pneumatic power to pulling force (Wickramatunge and Leephakpreeda, 2009).
In 1980s, the PAMs were designed and more powerful PAMs were introduced by Bridgestone Company (Wickramatunge and Leephakpreeda, 2009). The PAMs were used for painting applications and for assist disabled individuals and service robotics. Conventional Pneumatics actuators with piston and cylinder were widely used in factory automation. A muscle produces strength ten times greater than the strength of a conventional pneumatics actuator (Wszolek et al., 2007).
Lately robotic systems have started using pneumatics as a main motion power source. The main reasons for using pneumatics are: easy availability, dependability, flexibility, cleanliness, surges of power, linear motions, variable speed and safety. Apart from the above advantages there are a few limitations as mentioned below: low thrust, non-availability servo action. Several types of pneumatics actuators like cylinders, pneumatics engines and even pneumatics stepper motors are commonly used now days. A less well known type is Pneumatics Artificial Muscles (PAMs).
Characteristics of pams: PAMs are operated by pneumatic pressure and are contractible naturally upon inflation. Their construction materials simply consist of flexible inflatable membrane, reinforced with fibrous filament and fitted with gas closure fittings for mechanical load-carrying at its end. As the membrane is pressurized, it bulges outward in radial direction, while contracting in length along is axial direction. It is this axial contraction where PAM exerts a pulling force on its end-effectors. This force generated from contraction and the subsequent motion on the loads is unidirectional (Ramasamy et al., 2005). The most commonly used design to date, the McKibben (Lynn, 2008) muscle, has some drawbacks, mainly with regard to its control but also with regard to service life: the flexible membrane connected to rigid end fittings which introduces stress concentration and there from possible membrane ruptures. Cylinder, being entirely composed of rigid materials, does not suffer from these problems.
Application in robotics: Wickramatunge and Leephakpreeda (2009) reported that the low assembly weight and the high power-to-weight ratio of PAMs are most desirable to be considered for use in mobile robotics. In certain situation, the impotency of the PAMs is higher than the conventional pneumatics cylinder.
The development empirical model gives a concrete and effective description to understand the mechanical behavior of the PAMs for design and usage. The stiffness parameter of the muscle denotes as K and it is considered a function of the operating air pressure, P (Gauge pressure) and stretched length, Ls. The elastic forces adversely generated by the PAMs is denoted by Felastic and the expression given in Eq. 1 shows the proposed model for the force acting on the PAMs as a function of K and Ls:
| (1) |
In this study, the stiffness parameter K is taken as a second order polynomial function of Ls and P and it is expressed in Eq. 2. However, a universal approximation method with fuzzy logic or neural network can be used as alternative choice for accuracy viewpoint (Vanderborght, 2006):
| (2) |
where ao, a1, a2, a3 are constant coefficients, which can be obtained from experiment data. Typical values of coefficients in K for operating on construction mode under low pressure:
a0 = -2.977; a1 = -5.890; a2= 3.203 and a3 = 104.824 |
In the robotic application, one has to find suitable actuators which can satisfy the need for the strong and lightweight actuators. PAMs could very well suit in the near future for such needs. Pleated muscles have been proven to be able to perform very accurate positioning tasks employing PAMs (Vanderborght, 2006).
Ramasamy et al. (2005) reported the properties influencing the PAMs for their load-carrying capacity and low weight capability in assembly. Discussion on their designs and capacity to function as locomotion device in robotics applications have been analyzed by Finite Element (FE) modeling, to represent PAMs overall structural behavior under any potential operational conditions. He also (Ramasamy et al., 2005a) reported the construction of PAMs mainly consisting of flexible, inflatable membranes, having orthotropic materials behavior. In this study, the properties of the PAMs are explained in terms of their load carrying capacity and low weight in assembly.
Vanderborght (2006) is describing the implementation of Pleaded Pneumatic Artificial Muscles (PPAM) into innovative robotic application. This actuator has a very high power to weight ratio. Nowadays legged robots are gaining more and more interest. But most of the robots are using electrical drives, making these machines heavy and power consuming. An actuator, such as the PAM lowers the robot weight and the artificial muscle can be exploited to reduce energy consumption.
Deaconescu 2007 presented some of the result of research carried out in the Fluidtronics Laboratory of the Regional festo training centre. The experiments aimed at determining the variation diagrams of the feed pressure and the flow of consumed air for a complete cycle of the analyzed pneumatic muscle. Further, the response times of the muscle could be determined for various values of the feed pressure and the influence of adding a quick exhaust valve to the circuit on the response time for muscle deflation could be studied. Figure 1 presents the several constructive forms of pneumatic muscles and Fig. 2 presents the evolution in time of constructive solutions for pneumatic automation.
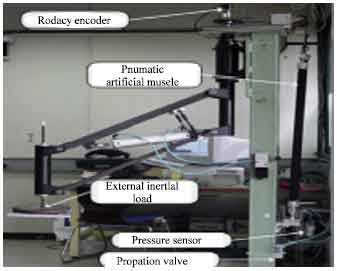
Kawashima et al. (2004) has described the usage of Fiber Knitted Pneumatic Artificial muscle Rubber Muscle (PARM) which was selected as the actuator for the arm. This arm can be designed for easy installation and portability. Experimental results conducted by the setup shown in the Fig. 3, showed that the developed system successfully operated in material handling system by remote operation.
Recently robotics field has been a choice for this PAM actuator usage because of its lightweight and high strength. Pneumatics Artificial Muscle seems a better choice than present day electric or other device (Daerden, and Lefeber, 2002). The pleated muscles have been proven to be able to perform very accurate positioning tasks. Using PAMs, the structure of a robot arm can be made a lot lighter and its payload to weight ratio a lot higher compared to electric drives.
 | |
| Fig. 1: | Constructive variants of constructive muscles (Deaconescu, 2007) |
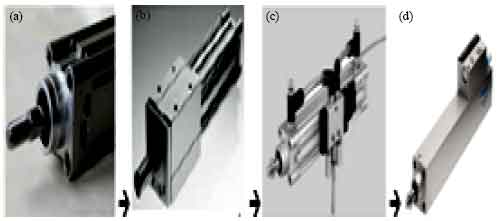 | |
| Fig. 2: | Constructive variants of pneumatic drives (Deaconescu, 2007) |
 | |
| Fig. 3: | Knitted PARM and Experimental Apparatus (Kawashima et al., 2004) |
Especially for mobile robot demanding lightweight actuators will be able to generate high torques at low and moderate speeds, Robotic arms can be connected to the structure without having to use gearing and they have better shock resistance capability and can be employed easily for autonomous operation (Daerden and Lefeber, 2002). In 2002, Daerden and Lefeber (2002) reported although PAMs has been around for quite time, this actuator has not been used. The author attributed the following reasons: the lack of large scale need for this specific type of actuator and the lack of technological effort to improve the existing designs.
Ahn and Nguyen, 2007 presented the solution for position control of a robot arm with a slow motion driven by two pneumatic artificial muscles as depicted in Fig. 4.
 | |
| Fig. 4: | The experimental apparatus (Ahn and Nguyen, 2007) |
In this study, the author explains some limitations such as a deterioration of the performance of transient response due to change in the external load. To overcome this problem, a switching algorithm of the control parameter using a learning vector quantization neural network (LVQNN) is proposed.
Wang et al. (2008) proposed a novel humanoid robot eye, which is driven by six Pneumatic Artificial Muscles (PAMs) and rotates with 3 Degree Of Freedom (DOF) as in Fig. 5. The design of the mechanism and motion type of the robot eye are inspired by that of human eyes. The model of humanoid robot eye is established as a parallel mechanism and the inverse-kinematic problem of this flexible tendons driving parallel system is solved by the analytical geometry method. As an extension, the simulation result for saccadic movement is presented under three conditions.
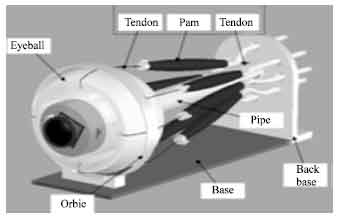 | |
| Fig. 5: | Prototype of humanoid robot eye (Wang et al., 2008) |
The design and kinematic analysis of the prototype could be a significant step towards the goal of building an autonomous humanoid robot eye with the movement and especially the visual functions similar to that of human.
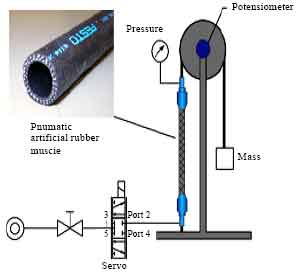
Performance evaluation of pams: In Deaconescu and Deaconescu, (2008) presented results of the ongoing theoretical and experimental research on the operational behavior of pneumatic muscle. Information is presented concerning muscle structure, as well as data on the generated forces, positioning accuracy and the maximum working frequency of these pneumatics actuation elements.
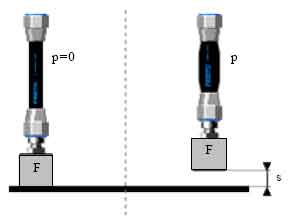
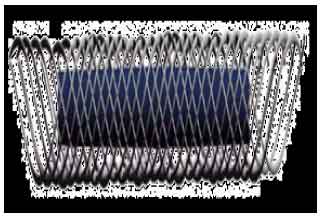
Figure 6 elaborate the stroke carried out by a pneumatic muscle depending on the level of the feed pressure. Pneumatic muscles are actuating elements that transform pneumatic energy into mechanical energy. A characterization of the behavior and the performances of these actuating elements entail both analytical calculations and thorough experimental research. In order to determine the functional characteristics of a pneumatic muscle, first its structure needs to be explored. A pneumatic muscle includes an interior tube of various length made from an elastic material, typically neoprene. This tube is wrapped in a multi-layer nylon tissue ensuring its strength and protection from the influences of the working environment. Figure 7 shows the geometry of the wrapping envelope Deaconescu and Deaconescu (2008).
In Lynn (2008) described the use of biomechanical phenomenological model to a commercially available pneumatic muscle actuator. Experiment has been conducted that defines boundaries of operation where linear approximations can be used to describe the dynamics of PAM. The dissertation shows that nonlinearities exist more prevalently at higher loads in the PAMs.
 | |
| Fig. 6: | The stroke carried out by a pneumatic muscle (Deaconescu and Deaconescu 2008) |
 | |
| Fig. 7: | The structure of pneumatic muscle (Deaconescu and Deaconescu 2008) |
In Toman et al. (2009) designed an apparatus which would enable experimental investigation of PAMs. The stand described in this study is a didactic laboratory stand, which can investigate and gather knowledge of construction of working elements such as: a fluidic muscle, a PLC controller, DSP system as well as proportional pressure control technique. The stand was designed and visualized by utilization of professional CAD software-Autodesk
In Kuriyama et al. (2009) proposed a method of estimating the length from the circumferential displacement, which can be measured by a sensor made of electro conductive, flexible rubber. Higher accuracy is obtained by measuring the circumferential displacement than by measuring the axial displacement using the sensor. The flexibility of the sensor enables us to accurately control the actuator without any loss of flexibility or increase in weight. Furthermore, the sensor does not require the attachment of any rigid fixtures. The accuracy of the estimate is successfully evaluated and the usefulness of the proposed method is verified through its application to a multi-link arm.
In Shen (2010) proposed a control methodology of the pneumatic artificial muscle (PAM) which actuated two servo systems. The four major processes including the flow dynamics, pressure dynamics, force dynamics and a load dynamics are studied to develop a full non linear model taking the valve command as the input and calculating the third order derivative of the load position as the output. Based on this model, the standard sliding mode control approach was applied to obtain robust control in the existence.
Chang (2010) developed an adaptive self-organizing fuzzy sliding mode control (ASOFSMC). Its fuzzy sliding surface can help reduce the number of fuzzy rule. The self-organizing mechanism is employed to modify fuzzy rules online. The model matching technique is then adopted to adjust the scaling factors. In Wickramatunge and Leephakpreeda, 2010 proposed models that are experimentally derived to describe mechanical behaviors of the PAMs. The experimental results show a non-linear relationship between contraction as well as air pressure within the PAMs and a pulling force of the PAMs. Three different sizes of PAMs available in industry are studied for empirical modeling and simulation. The case studies are presented to verify close agreement on the simulated results to the experimental results when the PAMs perform under various loads.
In Zhu et al. (2008) described a discontinuous projection-based adaptive robust control strategy is being adopted to compensate for both the parametric uncertainties and uncertain nonlinearities of a three-pneumatic-muscles-driven parallel manipulator to achieve precise posture trajectory tracking control. The resulting controller effectively handles the effects of various parameter variations and the hard-to-model nonlinearities such as the friction forces of the pneumatic muscles. Simulation and experimental results are obtained to illustrate the effectiveness of the proposed adaptive robust controller.
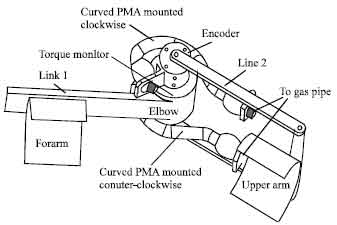
Zhang et al. (2008) proposed a novel curved pneumatic muscle based rotary actuator for the wearable elbow exoskeleton with joint torque control.
Compared to the general utilization of the Pneumatic Muscle Actuator (PMA) in a rotary joint, this novel structure weakens coupling relationship between the output torque/force and contacting displacement of the PMA so that it can be easily utilized in the tele-robotics with torque/force-feedback or the exciting application in rehabilitation for a wide range. By referred to two physical models, namely beam model and membrane model, the mechanics properties of this mechanical structure is analyzed.
 | |
| Fig. 8: | Scheme of the novel curved PMA rotary actuator in the wearable elbow exoskeleton (Zhang et al., 2008) |
In addition a hybrid fuzzy controller composed of bang-bang controller and fuzzy controller is employed for output torque control with high accuracy as well as fast response. In a series of experiments, the actuator exhibits both good static and dynamic performances that well validated the models and control strategy. Figure 8 shows scheme of the novel Curved PMA rotary actuator in the wearable elbow exoskeleton.
In Zhang et al. (2005) reviews the working principles of pneumatic muscle actuators, on the application in parachute systems for soft-landing and steering control. A new finite element model for pneumatic muscle actuators is presented. Geometrically nonlinear anisotropic membrane elements are used in this model to simulate the nonlinear structural dynamic behavior of pneumatic muscle actuators, which is different from previous approaches. A quasi-static pneumatic muscle actuator model is analyzed for validation and two dynamic applications of pneumatic muscle actuators in parachute systems are also presented.
Zhou et al. (2004) stated a special cable element which is developed to model the mechanical behavior of PMAs. The new element provides relationships between the PMA internal pressure, fiber bias angle, PMA radius and length, and resultant axial force, based on the kinematic assumption of inextensible PMA fibers. The principle of virtual work and total Lagrange formulation are used to derive the element internal force vector and tangent stiffness matrix. The PMA element is implemented in a geometrically nonlinear, transient finite element program m for simulating the structural dynamics of airdrop systems. Several numerical examples are given to validate the mechanical behavior of the new element. Two large-scale application problems are also presented to demonstrate the capabilities of the new element for simulating PMAs used in airdrop systems.
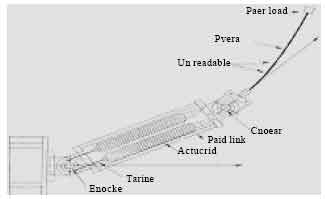 | |
| Fig. 9: | Schematic diagram of the manipulator (Park et al., 2002) |
In Zhou et al. (2004) has described, position control problem of a two-degree-of-freedom arm system having a flexible second link with artificial pneumatic muscle-type actuators. In Fig. 9, a composite controller design method is proposed in the framework of the singular perturbation method. Various robust control schemes are designed in order to meet with payload variation, parameter uncertainty, unmodeled vibration mode, actuator dynamics both in the slow and the fast subsystems.
CONCLUSION
The PAMs has a wide choice for application in automation, robotics and material handling device. The construction and the capabilities of PAMs have been analyzed by various authors by adopting experimental and numerical methods. Apart from finding the characteristic of the PAMs, authors have indicated different strategies for analyzing the behaviors under different applications. Various techniques of modeling like Artificial Neural Networks (ARNN) and Fuzzy modeling system have been adopted for analyzing the rigidity and non-linear behavior of PAMs for getting good performance in controlling the PAM actuator for the real time industrial and human friendly applications.
ACKNOWLEDGMENT
The author’s wish to thank the Universiti Teknologi PETRONAS (UTP) for the facilities to conduct the research.
REFERENCES
- Ramasamy, R., R. Ramasamy, M.R. Juhari, S. Yaacob and N.F.M. Nasir et al., 2005. An application of finite elements modeling to pneumatic artificial muscle. Am. J. Applied Sci., 2: 1504-1508.
Direct Link - Wszolek, G., G. Stawarz and P. Zub, 2007. The laboratory stand for didactic and research of a fluidic muscle. J. Achievements Mater. Manuf. Eng., 25: 77-80.
Direct Link - Deaconescu, A. and T. Deaconescu, 2008. Contribution to the behavior study of pneumatically actuated artificial muscles. Proceedings of the 6th International DAAAM Baltic Conference, April 24-26, Industrial Engineering, Tallinn, Estonia, pp: 1-5.
Direct Link - Kawashima, K., T. Sasaki, T. Miyata, N. Nakamura, M. Sekiguchi and T. Kagawa, 2004. Development of robot using pneumatics artificial rubber muscle to operate construction machinery. J. Robotics Mechatronics, 16: 8-16.
Direct Link - Toman, P., J. Gyeviki, T. Endrody, J. Sarosi and A. Veha, 2009. Design and fabrication of a test-bed aimed for experiment with pneumatic artificial muscle. J. Eng., 7: 91-94.
Direct Link - Kuriyama, S., Y.M.D. Kurita, T. Ogasawara and J. Ueda, 2009. Flexible sensor for mckibben pneumatic muscle actuator. Proceedings of IEEE Sensors, Oct. 25-28, Christchurch, pp: 520-525.
CrossRef - Daerden, F. and D. Lefeber, 2002. Pneumatics artificial muscle: Actuators for robotics and automation. Eur. J. Mechanical Environ. Eng., 47: 11-22.
Direct Link - Shen, X., 2010. Nonlinear model-based control of pneumatic artificial muscle servo system. Control Eng. Practice, 18: 311-317.
CrossRef - Chang, M.K., 2010. An adaptive self-organizing fuzzy sliding mode controller for a 2-DOF rehabilititation robot actuated by pneumatic muscle actuators. Control Eng. Practice, 18: 13-22.
CrossRef - Ahn, K.K. and H.T.C. Nguyen, 2007. Intelligent switching control of a pneumatic muscle robot arm using learning vector quantization neural network. Mechatronics, 17: 255-262.
CrossRef - Wickramatunge, K.C. and T. Leephakpreeda, 2010. Study on mechanical behaviors of pneumatic artificial muscle. Int. J. Eng. Sci., 48: 188-198.
Direct Link - Zhu, X., G. Tao, B. Yao and J. Cao, 2008. Adaptive robust posture control of a parallel manipulator driven by pneumatic muscle. Automatica, 44: 2248-2257.
CrossRef - Zhang, J.F., C.J. Yanga, Y. Chena, Y. Zhanga and Y.M. Donga, 2008. Modeling and control of a curved pneumatic muscle actuator for wearable elbow exoskeleton. Mechatronics, 18: 448-457.
CrossRef - Wang, X.Y., Y. Zhang, X.J. Fua and G.S. Xiang, 2008. Design and kinematic analysis of a novel humanoid robot eye using pneumatic artificial muscles. J. Bionic Eng., 5: 264-270.
CrossRef - Zhang, W., M.L. Accorsi and J.W. Leonard, 2005. Analysis of geometrically nonlinear anisotropic membranes: Application to pneumatic muscle actuators. Finite Elements Anal. Design, 41: 944-962.
CrossRef - Zhou, B., M.L. Accorsi and J.W. Leonard, 2004. A new finite element for modeling pneumatic muscle actuators. Comput. Struct., 82: 845-856.
CrossRef - Park, N.C., H.S. Yang, H.W. Park and Y.P. Park, 2002. Position/vibration control of two-degree-of-freedom arms having one flexible link with artificial pneumatic muscle actuators. Robotics Autonomous Syst., 40: 239-253.
CrossRef