
Deni Saepudin
Program Studi Ilmu Komputasi, Insitut Teknologi Telkom, Jl. Telekomunikasi No. 1, Bandung 40257, Indonesia
Pudjo Sukarno
Drilling and Production Engineering and Oil and Gas Management Research Group, Institut Teknologi Bandung, Jl. Ganeca 10 Bandung 40132, Indonesia
Edy Soewono
Financial and Industrial Mathematics Research Group, Institut Teknologi Bandung, Jl. Ganeca 10 Bandung 40132, Indonesia
Kuntjoro Adji Sidarto
Financial and Industrial Mathematics Research Group, Institut Teknologi Bandung, Jl. Ganeca 10 Bandung 40132, Indonesia
Agus Yodi Gunawan
Financial and Industrial Mathematics Research Group, Institut Teknologi Bandung, Jl. Ganeca 10 Bandung 40132, Indonesia
Journal of Applied Sciences
Year: 2010 | Volume: 10 | Issue: 16 | Page No.: 1705-1713







ABSTRACT
In this study, optimization problems for a cluster of gas lift wells system, which are coupled with a production and gas injection manifold, are discussed. The main goal is to determine the optimum gas injection rate for each well that maximizing the total oil production rate. The total gas for injection is constrained by the maximum availability and the total liquid production rate is constrained by separator capacity. The mathematical model for gas lift problem could be written as a boundary value problem, where the two parameter family non linear differential equation of the boundary value problem represents steady flow equation along the tubing, satisfying wellhead pressure and bottom hole pressure as boundary conditions. Oil production rate is a non-linear function of gas injection rate, which is given implicitly from the gas lift model. A computation scheme based on genetic algorithms is developed to solve the constrained optimization problem with and without considering separator capacity. Our results show quite good estimation for optimum solution. This approach is also flexible to accommodate separator capacity constraints.
PDF Abstract XML References Citation
Received: February 20, 2010;
Accepted: May 20, 2010;
Published: June 26, 2010
How to cite this article
Deni Saepudin, Pudjo Sukarno, Edy Soewono, Kuntjoro Adji Sidarto and Agus Yodi Gunawan, 2010. Oil Production Optimization in a Cluster of Gas Lift Wells System. Journal of Applied Sciences, 10: 1705-1713.
DOI: 10.3923/jas.2010.1705.1713
URL: https://scialert.net/abstract/?doi=jas.2010.1705.1713
DOI: 10.3923/jas.2010.1705.1713
URL: https://scialert.net/abstract/?doi=jas.2010.1705.1713
INTRODUCTION
Oil production rate from a production well decreases gradually with respect to time. After some period of time, the production rate may fall to a level that economically no longer profitable. This condition encourages engineers to apply some artificial lift methods to increase oil production and one of them that commonly used is gas lift.
During the lift process using gas lift, gas is injected at selected point into the tubing to lighten the fluid column along the tubing, in order to enable the fluid to be delivered to the surface. Oil production normally increases as gas injection increases. However, too much gas injection will cause slippage where gas phase moves faster than liquid. This condition leads to reduction in oil production. Identifying optimal gas injection that maximizing oil production is the main interest in gas lift optimization problem.
In an oil field, oil is produced from a cluster of gas lift wells. The schematic flow of a cluster of gas lift wells is shown in Fig. 1. Oil and gas that are produced from each well are delivered to a production manifold and then collected in a separator.
 | |
| Fig. 1: | Schematic flow of a cluster of gas lift wells |
After separation process, oil is distributed to the oil pipe line network. Some gas is reused for injection and the remaining gas is for sale. Gas available for injection is usually very limited and should be allocated in optimal form for each well. Here the optimization problem to solve is: How to share the injected gas to each well in order to yields maximum total oil production rate?
The optimization problem mentioned above is a complicated problem to which researcher have pay attention for long time. For each well, liquid production rate is a nonlinear function of gas injection rate, which is not known explicitly. In existing approaches, the optimization problem has been solved in three steps of procedure. The first step, a set of data that relate gas injection and oil production rate from each well are collected. The data are obtained from empirical or numerical simulation data. The second step, a regression or interpolation method is applied to estimate the nonlinear function which relates gas injection rate to liquid production rate. Some functions commonly used for regression are quadratic (Nishikori et al., 1995), combination between quadratic and logarithmic (Alarcon et al., 2002) and exponential function (Sukarno et al., 2006). Some researchers apply interpolation method to estimate the nonlinear function using piecewise linear function (Ray and dan Sarker, 2007a, b; Camponogara and Nakashima, 2006). The third step, the constrained optimization problem is solved numerically using non linear programming methods or other methods such as genetic algorithm.
For each well, liquid production as a non linear function of gas injection is obtained implicitly from gas lift model. The mathematical model for gas lift problem could be written as a two parameter family of a non linear differential equation (ODE):
| (1) |
that represents the steady state flow (gas and liquid) equation along the tubing, with wellhead pressure:
| (2) |
and bottom hole pressure:
| (3) |
as the boundary conditions. The real valued function ![]() is non negative:
is non negative:
| (4) |
qg and ql where 0≤qg≤1 and 0≤ql≤1 are gas injection rate and liquid production rate respectively. Here F is pressure gradient function that depends on well geometry (such as depth and tubing diameter) and fluid properties (such as density, viscosity) in each well. The existence and uniqueness of liquid production rate as an implicit function of gas injection rate has been shown by Saepudin et al. (2007). Also, a computation scheme using genetic algorithm to find optimum gas injection rate has been proposed by Saepudin et al. (2007) and also by Sukarno et al. (2009) for dual gas lift well system. The last computation approach mentioned has reduced the collecting data and regression or interpolation procedure as required in the previous approaches.
In this study, development of mathematical model and computation scheme by Saepudin et al. (2007) and Sukarno et al. (2009) are proposed to solve the optimization problem in a cluster of gas lift wells system.
MATHEMATICAL MODEL
In an oil production well, reservoir fluid, which will be assumed consists of oil and water, flow from reservoir through tubing to the surface. When gas lift is applied, the reservoir fluid will mix with the gas injection and a two phase fluid flow (liquid and gas) takes place along the tubing. In the simplest form, a mathematical model for gas lift problem could be expressed as a combination of fluid flow in the reservoir and along the tubing.
Single gas lift well model: Assuming injection point near the bottom hole and reservoir fluid consists of oil and water, the mathematical model for gas lift problem in normalized form could be written as the boundary value problem (1)-(3). The Eq. 1 is derived from the mechanical energy balance equation (Economides et al., 1994):
| (5) |
where, the terms:
correspond to the pressure drop due to gravity, friction and acceleration, respectively. Mixture density ![]() and velocity
and velocity ![]() are function of pressure P, gas injection rate qg and liquid production rate ql. Since the liquid and gas superficial velocities are given by:
are function of pressure P, gas injection rate qg and liquid production rate ql. Since the liquid and gas superficial velocities are given by:
| (6) |
and the cross section area of the tubing is:
then Eq. 5 could be written as:
 | (7) |
In this study, the two phase fluid flow model along the tubing will be given by a simple homogeneous model with slip, known as drift-flux model. Although this model is not as accurate as mechanistic models, it has advantages of being relatively simple, continuous and differentiable (Shi et al., 2005).
The in situ average density ![]() in Eq. 7 can be expressed as:
in Eq. 7 can be expressed as:
| (8) |
where, gas density pg that depends on the pressure P is given by:
| (9) |
The average void fraction yg is given by drift-flux model of Zuber and Findlay (Shi et al., 2005; Guet and Ooms, 2006):
| (10) |
The parameter distribution C0 accounts for the effect of the non uniform distribution of both velocity and concentration profiles. Drift-flux velocity Ud accounts for mean relative velocity between two phases. There are several drift-flux correlations offering procedures to compute C0 and Ud some of them are written by Shi et al. (2005). The friction factor f is a function of Reynold Number and the pipe roughness. In this study, f is assumed constant.
In the reservoir, liquid production rate in steady state can be expressed by the following equation:
| (11) |
where, Pwf and Pr represent bottom hole pressure and reservoir pressure, respectively and J is called productivity index.
Let, L be the injection depth (since the injection point is assumed near the bottom hole), then the injection depth is considered equals to the well depth. The gas lift performance model for single well is given by the differential Eq. 7 with boundary conditions are given by:
| (12) |
and
| (13) |
where, the right hand side of Eq. 13 is given by the right hand side of Eq. 11. By scaling:
| (14) |
the Eq. 7 can be expressed as:
 | (15) |
Therefore, the gas lift model can be written as the boundary value problem (1-3), with the right hand sides are given by the right hand sides of Eq. 15, 12 and 13, respectively. Liquid production as a function of gas injection qg:
| (16) |
could be obtained implicitly from the gas lift model (1-3) and the graph of Eq. 16 is known as Gas Lift Performance Curve (GLPC).
Multi gas lift wells model: In many cases of gas lift system, oil is produced from an oil field which consists of a group of gas lift wells as illustrated in Fig. 1. Gas for injection is shared for each well through an injection manifold in appropriate proportion. Considering complexity of the problem, we assume here the system consists of N gas lift wells, the amount of injected gas through the injection choke can be controlled as required by each well, the injection point is near the bottom of the well, the separator position is close enough to the production manifold (the pressure difference between separator and manifold can be neglected), flow lines are horizontal and the separator capacity is large enough (unlimited). The multi gas lift wells model then could be written as:
| (17) |
| (18) |
| (19) |
| (20) |
 | (21) |
The terms P1k and P2k represent pressure in the pipe along the flow line and along the tubing of kth well, respectively. The model is a development of the single gas lift well model (1-3). The pressure gradient F1k of the initial value problem (17-18) which represents gas and liquid flow model along the horizontal flow line of kth well, could be obtained from Eq .15 by dropping the gravity terms and is given by:
 | (22) |
Equation 19 represents gas and liquid flow model along the tubing for kth well, where the pressure gradient is given by:
 | (23) |
The term Qgav represents the maximum gas available for injecting the N gas lift wells.
Let Jm and Prm be productivity index and reservoir pressure of mth well satisfying:
| (24) |
Taking:
 | (25) |
and
| (26) |
Equation 17-21 could be written as:
| (27) |
| (28) |
| (29) |
| (30) |
 | (31) |
In the sequels we drop tildes from Eq. 27-31. For each k = 1, 2,..., N, the gas lift performance function of the kth well is given by:
| (32) |
where, Eq. 32 satisfies Eq. 27-31.
OPTIMIZATION PROBLEM
In gas lift well system, optimization problem which commonly studied is: How to maximize total oil production with respect to various constraints such as maximum gas available Qgav to supply injected gas for N gas lift wells and surface facility constraints such as separator capacity. Reservoir liquid is assumed consists of water and oil with proportion given by Water Cut (WC). Therefore oil production rate is expressed as:
| (33) |
Oil production maximization without considering separator capacity: In this case, oil maximization problem could be expressed as a constrained optimization problem:
Determining qg∈D1 that maximizes:
| (34) |
where for each k = 1, 2,..., N, function φk (qgk) satisfies Eq. 27-31, with search space:
 | (35) |
In case, where total gas available for injection Qgav is large enough, then for each k = 1, 2,..., N, the value of qgk could be chosen such that maximizing φk (qgk). However, in most cases, Qgk is limited. This is a complicated optimization problem, since for each k = 1, 2,..., N, the function φk (qgk) is never known explicitly.
For each k = 1, 2..., N, let P2k (z, P; ggk, qlk) be solution of Eq. 27-31 and for any given, the liquid production rate (32) could be obtained implicitly using Eq. 31. Therefore the constrained maximization problem (34-35) could be expressed as:
Determining qg∈D1 that maximizes:
| (36) |
with constraints:
| (37) |
Further, solution of the constrained maximization problem (36-37) is equivalent with solution of the following minimization problem:
Minimize
 | (38) |
in search space:
 | (39) |
Oil production maximization with considering separator capacity: In reality, separator capacity is limited and total liquid production rate possibly exceeds separator capacity. If this condition happened, gas injection rates should be recalculated in order the total liquid production rate equals to separator capacity. Since solutions those satisfy this requirement are not unique, the solution is chosen that maximizes total oil production and minimizes total gas injection required. The optimization problem then could be expressed as follow
Determining qg∈D2 that maximizes Eq. 34 and minimizes:
| (40) |
with search space:
 | (41) |
Using penalty function approach, solution of the optimization problem could be obtained by solving the following minimization problem:
 | (42) |
in the domain:
 | (43) |
for large enough value of λ1. In the following section, a numerical scheme is built to solve the optimization problems Eq. 38-39 and 42-43.
NUMERICAL SCHEME
For each k = 1, 2,..., N and for given qgk and glk let ![]() (1; qgk, qlk) be pressure function P2k (z; qgk, qlk) satisfying initial value problem Eq. 29-30, which will be computed numerically using Runge-Kutta method. Using penalty function approach (Bazara et al., 1993; Coello, 2002), solution of the following minimization problem:
(1; qgk, qlk) be pressure function P2k (z; qgk, qlk) satisfying initial value problem Eq. 29-30, which will be computed numerically using Runge-Kutta method. Using penalty function approach (Bazara et al., 1993; Coello, 2002), solution of the following minimization problem:
 | (44) |
in domain:
 | (45) |
converges to solution of Eq. 38-39. And solution of minimization problem:
 | (46) |
in domain:
| (47) |
converges to solution of Eq. 42-43, for large enough λ1 and λ2. Solutions of the optimization problems are computed using genetic algorithm (Goldberg, 1989). In practice, one prefers a rectangle search space. Using the following transformation:
| (48) |
| (49) |
| (50) |
the domain Eq. 51 could be expressed as a rectangle domain:
 | (51) |
And using transformation:
| (52) |
| (53) |
| (54) |
| (55) |
| (56) |
| (57) |
the domain Eq. 47 could be expressed as a rectangle domain:
| (58) |
A numerical scheme based on genetic algorithm is constructed. The domain Dθ1 and Dθ2 are chosen as search spaces to keep population in the domain as genetic operators work. Computation procedure could be written as follow:
| Step 1: | Generate initial population v1, v2,..., vr which correspond to {(θ(j), ql(j)), j = 1, 2,..., r}⊂Dθ1 for unbounded separator case and {(θ(j), α(j)), j = 1, 2,..., r}⊂Dθ2 for bounded separator case |
| Step 2: | Using transformation Eq. 48-50 for unbounded separator case and using transformation Eq. 52-57 for bounded separator case, the corresponding {(qg(j), ql(j)), j = 1, 2,..., r} could be obtained |
| Step 3: | Using 4th order Runge Kutta method, |
| Step 4: | The value of |
| Step 5: | Applying genetic operators (crossover, mutation, selection), new population are obtained |
| Step 6: | Return to step 2 until convergence criteria are satisfied |
COMPUTATIONAL RESULTS
Here, some numerical results are shown for hypothetic data which is given in Table 1. Gas lift performance curve for all wells are depicted in Fig. 2a-d.
As we could see from Fig. 2, the GLPC are unimodal curves where their peak points correspond to the maximum liquid or oil production rates obtained by gas lift. Relationship between oil and liquid production rate is given by Eq. 33. Therefore, larger liquid production rate does not correspond to larger oil production rate. One could check these facts by comparing Fig. 2a with 2c or comparing Fig. 2b with 2d, where well No. 2 produces the largest liquid rate, but the oil production rate is less than well No. 1.
| Table 1: | Hypothetic well data |
 | |
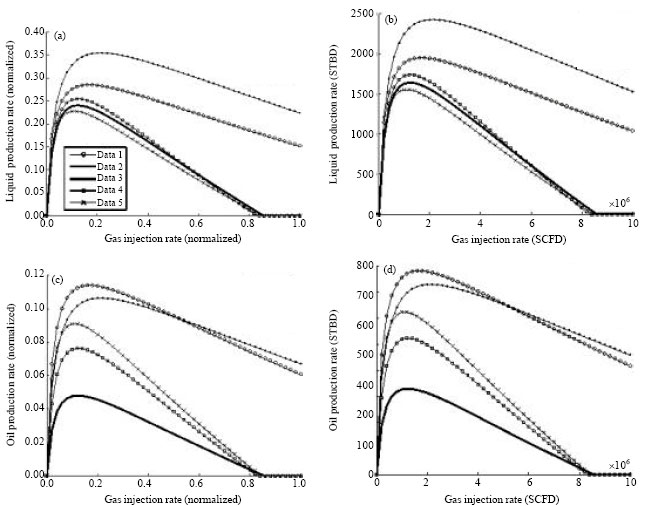 | |
| Fig. 2: | Gas lift performance curves: (a) liquid prod. vs. gas inj. rate (normalized) , (b) liquid prod. vs. gas inj. rate (field units), (c) oil prod. vs. gas inj. rate (normalized) and (d) oil prod. vs. gas inj. rate (field units) |
If large amount of gas available and separator capacity is large enough, the gas injection could be chosen those maximize liquid production rate. In this case, maximum total oil production rate is 2985.013 STBD (which corresponds to 9327.989 STBD of liquid) and total gas injection required is 7.405 MMSCFD.
For unlimited separator capacity case, numerical simulation is conducted for varying total gas available and the results are written in Table 2 and 3.
We could see from Table 2 and 3, for unlimited gas injection case, the computational results could be compared with exact solutions and they show quite agreement.
| Table 2: | Optimum solutions for unlimited separator capacity case (normalized) |
 | |
| Table 3: | Converted computational results into field units |
 | |
 | |
| Fig. 3: | Maximum total oil production vs. total gas available: (a) normalized and (b) in field units |
| Table 4: | Optimal solutions for limited separator capacity case (normalized) |
 | |
| Table 5: | Optimal solutions for limited separator capacity case (field units) |
 | |
Term exact solutions here mean optimum solutions which are obtained by computing optimal solution for individual well separately.
Relationship between total oil production and total gas injection available is shown in Fig. 3a and b. As we can see from the figure, if the total gas injection is less than 6 MMSCFD, the total oil production rate increases quickly as total gas injection increases and just increases slightly if the total gas injection is larger than 6 MMSCFD. This means that allocating so much gas for injection is not always economically profitable.
For limited separator capacity case, computational results and corresponding conversion into field unit are given in Table 4 and 5. We could see from Table 5 that the largest contribution for oil production comes from well No. 1 which means that the oil production is dominated by well production that produces the largest oil production rate (Fig. 2).
In numerical simulation, population size is 100, crossover probability is 0.9, mutation probability is 0.1 and maximum generation is 500.
DISCUSSION
In future study, optimization problem in gas lift wells system should consider more additional constraints such as gas injection flow from casing annulus into the tubing that leads to the production stability conditions. The flexibility and robustness of the proposed computational method are potential to handle such constraints.
CONCLUSIONS
Some conclusion remarks are obtained through this study.
| • | Oil optimization problem in a cluster of gas lift wells system could be written in mathematical model as a constrained optimization problem in a class of boundary value problems |
| • | Genetic algorithm with penalty function constraint handling approach could overcome complexity of computation in finding optimal solution of gas lift problem |
| • | This approach gives better quality prediction for optimum solution than previous approach since all solutions are obtained from model, not from regression or interpolation |
ACKNOWLEDGMENT
The authors thank the Research Consortium on Gas and Pipeline Network ITB (RC OPPINET) for providing relevant data and field information.
REFERENCES
- Nishikori, N., R.A. Redrer, D.R. Doty and Z. Schmidt, 1995. An improved method for gas lift allocation optimization. J. Energy Resour. Technol., 117: 87-92.
Direct Link - Alarcon, G.A., C.F. Torres and L.E. Gomez, 2002. Global optimization of gas allocation to a group of wells in artificial lifts using nonlinear constrained programming. J. Energy Resour. Technol., 124: 262-268.
CrossRefDirect Link - Ray, T. and R. Sarker, 2007. Optimum oil production planning using an evolutionary approach. Stud. Comput. Intel., 49: 273-292.
CrossRefDirect Link - Ray, T. and R. Sarker, 2007. Genetic algorithm for solving a gas lift optimization problems. J. Pet. Sci. Eng., 59: 84-96.
CrossRef - Camponogara, E. and P.H.R. Nakashima, 2006. Solving a gas lift optimization problem by dynamic programming. Eur. J. Operation Res., 174: 1220-1246.
CrossRef - Saepudin, D., E. Soewono, K.A. Sidarto, A.Y. Gunawan, S. Siregar and P. Sukarno, 2007. An investigation on gas lift performance curve in an oil producing well. Int. J. Mathematics Mathematical Sci., 2007: 1-15.
CrossRefDirect Link - Shi, H., J.A. Holmes, L.J. Durlofsky, K. Aziz, L.R. Diaz, B. Alkaya and G. Oddie, 2005. Drift flux modelling of two phase flow in wellbores. SPE J., 10: 24-33.
Direct Link - Guet, S. and G. Ooms, 2006. Fluid mechanical aspects of the gas lift technique. Annu. Rev. Fluid Mechanics, 38: 225-249.
CrossRefDirect Link - Coello, C.C.A., 2002. Theoritical and numerical constraint-handling techniques used with evolutionary algorithms: A survey of the state of the art. Comput. Methods Applied Mechanics Eng., 191: 1245-1287.
CrossRef - Sukarno, P., D. Saepudin, S. Dewi, E. Soewono, K.A. Sidarto and A.Y. Gunawan, 2009. Optimization of gas injection allocation in a dual gas lift well system. J. Energy Resour. Technol., 131: 7-7.
CrossRefDirect Link