
S. Movaghati
Department of Geomatics Engineering, College of Engineering, University of Tehran, Iran
F. Samadzadegan
Department of Geomatics Engineering,College of Engineering, University of Tehran, Iran
A. Azizi
Centre of Excellence for Disaster Management, Department of Geomatics Engineering, College of Engineering, University of Tehran, Iran
Journal of Applied Sciences
Year: 2009 | Volume: 9 | Issue: 20 | Page No.: 3672-3681







ABSTRACT
In this study, we propose an agent-based approach for adaptive regional forest fire detection using MODIS data. It utilizes the tests used in MODIS version 4 contextual fire detection algorithm to determine agent behavioral responses. To do so, initially, a collection of autonomous agents will be distributed at a number of pixels in the considered image with high potential of being a fire pixel. These pixels are pre-selected based on brightness temperature and NDVI values of a given pixel with respect to those of its surrounding pixels rather than fixed threshold values. Performance of the proposed algorithm was compared with MODIS version 4 contextual fire detection algorithm and ground-based measurements. The results show high potential of the proposed method to be applied for automatic forest fire detection at regional scale.
PDF Abstract XML References Citation
How to cite this article
S. Movaghati, F. Samadzadegan and A. Azizi, 2009. An Agent-Based Approach for Regional Forest Fire Detection using MODIS Data. Journal of Applied Sciences, 9: 3672-3681.
DOI: 10.3923/jas.2009.3672.3681
URL: https://scialert.net/abstract/?doi=jas.2009.3672.3681
DOI: 10.3923/jas.2009.3672.3681
URL: https://scialert.net/abstract/?doi=jas.2009.3672.3681
INTRODUCTION
To date, several algorithms have been proposed for fire detection using remote sensing data. Generally, the presented algorithms based on single-date remote sensing imagery are classified as either fixed threshold or contextual (Li et al., 2001). In comparison, contextual algorithms are more flexible than the former, because they are self-adaptive and automatically detect fires under different conditions (Giglio et al., 1999; Ichoku et al., 2003; Li et al., 2001, 2005). For example, the MODIS contextual fire detection techniques are planned to be fully automated for operational daily, global fire monitoring (Giglio et al., 2003; Justice et al., 2002; Kaufman et al., 1998). However, in contextual algorithms, selection of fixed threshold values for identifying potential fire pixels (a primary classification for elimination of obvious non-fire pixels) is counted as a weakness for regional fire detection in which detection of small fires is important too; inadequate fixed threshold values may produce either commission or omission errors (Csiszar et al., 2003; Cuomo et al., 2001; Giglio et al., 2003; Li et al., 2001, 2003; Wang et al., 2007). To solve this problem some efforts have already been carried out (Wang et al., 2007). In this study, we propose an agent-based approach for regional forest fire detection using MODIS data.
Autonomous agents are systems that inhabit a dynamic, unpredictable environment in which they try to satisfy a set of time dependent goals or motivations (Maes, 1994). Since last decade, some efforts have been done for application of agents in image processing. For example, algorithms represented by Liu and Tang (1998, 1999) are agent-based approaches for image segmentation. In these studies, agents operate directly on the individual pixels of a given image. The behavioral patterns of the agents are pre-defined and will trigger their local stimuli that come from evaluation of some criteria in their neighboring regions. The agents exhibit some of the following reactive behaviors: breed offspring agents, move to adjacent pixels, leave a label, or vanish in the image. Compared with conventional methods, agent-based approaches have some advantages such as being adaptive to locality, reliable in performance, less sensitive to the noise and easy to represent and implement repeated again and again in literatures (Keshtkar and Gueaieb, 2006; Liu and Tang, 1998, 1999). To benefit from abovementioned advantages, we represent an agent-based approach for forest fire detection using diurnal MODIS data at regional scale. It is based on MODIS version 4 contextual algorithm (Giglio et al., 2003) but there is no need to set any fixed threshold value for selection of potential fire pixels.
MATERIALS AND METHODS
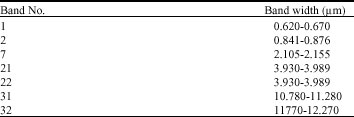
Satellite data set: Remotely sensed data used to detect active fires are MODIS level 1B radiance product (MOD02) and geolocation data set (MOD03). The MODIS data used for this study covers the period from 24 July 2006 to 27 July 2006 (3 days) for our study area, Kermanshah Province (Table 1). The TIR band data were converted into brightness temperature using inverse Planck function. Moreover, the reflectance values are computed from visible and NIR bands. The bands used in our study are shown in Table 2. In addition, the view and solar zenith/and azimuth angle values and land/sea mask were obtained for each image. NDVI values were also calculated for each image.
Auxiliary data: The ground observations were provided by Forest, Range and Watershed Management Organization using GPS (Table 3). Standard forms are used for documentation of when and where fires occurred. These fire reports are based on ground observations and include the fire number, location, size and burning period.
Proposed agent-based approach for regional forest fire detection: The flowchart of this proposed algorithm is shown in Fig. 1. The proposed algorithm is composed of the following steps: cloud and water masking, identification of potential fire pixels, agent initialization and searching and labeling active fire pixels.
| Table 1: | Specifications of MODIS imageries used |
 | |
| Table 2: | MODIS bands used in this study |
 | |
In present approach, agents operate directly on the individual pixels of a given image. Initially, they are inhabited in potential fire pixels selected using brightness temperature values in 4 and 11 μm bands (depicted by T4 and T11, respectively) and NDVI values of a neighboring region. They sense the neighboring pixels and check some criteria based on tests used in MODIS version 4 contextual algorithm (Giglio et al., 2003) to detect forest fire pixels. The agents can self-reproduce, diffuse and vanish during the course of interacting with a given image.
| • | Cloud and water masking: The 1 km land/sea mask contained in MODIS geolocation data set is used to exclude water pixels. Cloud detection is based on the technique used in the MODIS version 4 contextual algorithm (Giglio et al., 2003) |
| • | Identification of potential fire pixels: Using T4, T11 and NDVI values, potential fire pixels are selected from MODIS images in a different manner compared to conventional approaches. The proposed method is based on local variation of T4, ΔT = T4–T11 and NDVI values of pixels in a nxn window (n = 3) for selection of potential fire pixels among all the cloudless and non-water pixels. It does not require any fixed threshold value. Indeed, after cloud and water masking (Giglio et al., 2003), a pixel is identified as a potential fire pixel if it satisfies the following conditions: |
| (1) |
| (2) |
| (3) |
where, subscript w indicates local window centered in the supposed pixel. As a result, NPFP pixels are detected as potential fire pixels.
Test 1 and 2 are based on the fact that if a forest fire happens in an area, it will bring rapid changes in brightness temperature value of the corresponding pixel compared to its surrounding (Byun et al., 2005).
| Table 3: | Specifications of ground based measurements |
 | |
 | |
| Fig. 1: | The flowchart of the proposed algorithm |
The sharp contrast between target, here fire and background helps active fires to be reliably detected even when the fire covers small fractions of a pixel (Byun et al., 2005; Lentile et al., 2006). In addition, owning to Wien's displacement law, the brightness temperature of a fire pixel in MIR bands, e.g., 4 μm band (T4), change significantly compared to that of in TIR bands, e.g., 11 μm (T11), (Byun et al., 2005), whereupon the difference between brightness temperature values of 4 and 11 μm bands (ΔT) is a main parameter to distinguish between fire and non-fire pixels in a given neighborhood. Also, test 3 is based on the fact that at the spatial resolution of most satellite sensors (pixel size>30 m), when vegetation is burned, the surface reflectance in visible to NIR region (i.e., 0.4-1.3 μm) decrease significantly (Lentile et al., 2006). Moreover, Robinson (1991) showed that pixels containing hotspots and their nearest neighbors, tended to be less green than the general background. They interpreted it as fire damage to vegetation. In other words, NDVI value of an active fire pixel is less than those of its neighboring pixels. Using NDVI values in combination with brightness temperature values in tests 1-3, we take into consideration the nature of fires in forest lands, not any hot object.
| • | Agent initialization: The given image is considered as a grid for a class of autonomous agents, i.e., fire agents (Fig. 2). As shown in Fig. 2, T4, ΔT, ρ0.65, ρ0.86, ρ2.1, land/sea mask and θg are the image features that will be used in next step. Here, ρ0.65, ρ0.86 and ρ2.1 are top of atmosphere reflectance values derived from MODIS 0.65, 0.86 and 2.1 μm bands; θg is sun glint angle. Initially, a group of NPFP agents is distributed in the image. They are inhibited in potential fire pixels selected in the prior section. These pixels play an important role in fire detection. In fact, most of the fires are placed in these pixels which agents are initialized and the remaining of fire pixels are found by offspring agents generated around them |
 | |
| Fig. 2: | Agent initialization, blue filled circles indicate agents |
| • | Searching and labeling active forest fire pixels: For a given recognition goal, the task is to find an appropriate mathematical relation. In the present experiment, we used a series of tests (contextual tests and an absolute threshold test), designed for MODIS version 4 contextual algorithm (Giglio et al., 2003), as the constraints that select and trigger the behavior of an agent at a pixel location for a neighboring region of radius R = 1 to detect fires. The radius is increased to a maximum of 10, as necessary (Giglio et al., 2003). The contextual tests use dynamic thresholds based on brightness temperature values of a given potential fire pixel and its neighboring. In addition, an absolute threshold test is used on a per-pixel basis. An agent will leave a marker at a daytime candidate fire pixel if the tests are satisfied, otherwise the agent will vanish (life span is set to Δ = 1). Also, three sets of tests are used to eliminate false alarms caused by sun glint, hot desert surfaces and coasts or shorelines as in (Giglio et al., 2003) |
 | |
| Fig. 3: | An agent (indicated by a blue filled circle) and the directions for it to self reproduce within a neighboring region (indicated by pink arrows) when k = 1 |
When a potential fire pixel contains no fire, it is not necessary to check its surrounding pixels. In such a case, an agent will not exhibit the behavior of moving to a new location within the neighboring region of the current location and vanish. If the fire size exceeds a pixel, it will be necessary to check the neighborhood of the considered pixel. To do so, the self-reproduction behavior generates a finite set of new agents near the pixel location labeled as a fire. The number of offspring agents reproduced at an active fire pixel is set to s = 2. The directions for an agent to self-reproduce within a neighboring region of radius k = 1 are determined according to a vector. Each component of the vector expresses the ordering of having successful self-reproduction in an ascending mode if the respective behavior in a certain direction is performed. In fact, the vector (V) can be written as follows:
| (4) |
where, vi ∈ {1,..,n} and n = 8 as shown in Fig. 3. Indeed, i is the ordering of a pixel in vi direction in the sorted set of neighbors based on decreasing of T4 values.
RESULTS
The proposed algorithm was applied to the images shown in Table 1. Figure 4 shows the distribution of (a) T4, (b) ΔT and (c) NDVI values in one row from the image on July 24, 2006. In Fig. 4a-c, red circles indicate local maximum of T4, local maximum of ΔT and local minimum of NDVI values. Figure 4d shows the results after identification of potential fire pixels. According to field data (Table 3), the selected row in the image contains no fire. As can be shown in Fig. 4d, any pixel wasn’t detected as a potential fire pixel. Figure 5a-c show those for one row from the image on July 27, 2006. According to field data (Table 3), there is a sub-pixel fire in the selected row.
| Table 4: | Attribute values for agent behavioral responses |
 | |
As can be shown in Fig. 5d, this pixel was detected as a potential fire pixel. Figure 5a-d show how spatial information surrounding pixels can be used to select potential fire pixels instead of fixed threshold values. To detect forest fire pixels, initially a number of agents are inhabited on previously selected potential fire pixels in the images. The attribute values for agents are shown in Table 4. Since, agent initialization and selection of the direction for agents to self-reproduce are not done randomly, but based on spatial information, after a few directional movements they will find fire events.
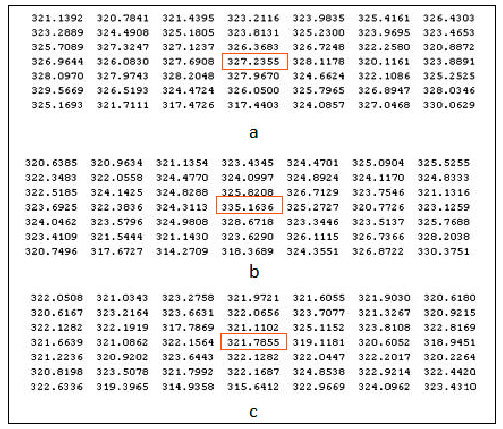
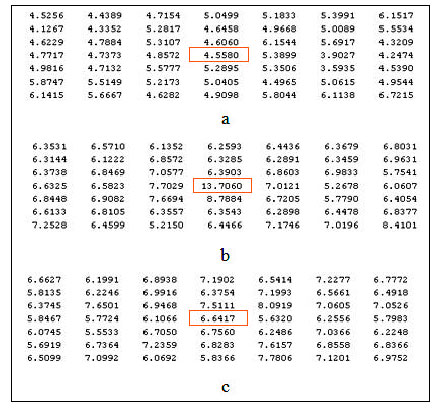
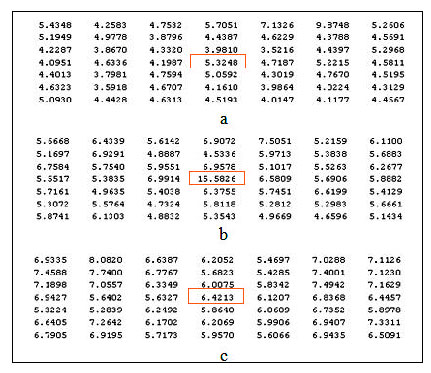
We compared the performance of the proposed algorithm with the MODIS fire product (version 4). Figure 6a and b are results of the image 1 (Table 1) produced by the proposed algorithm and MODIS fire product. The image was taken on July 24, 2006 when there was no fire event to be reported (Fig. 6c, Table 3). As can be seen, both algorithms haven’t detected any fire. This image was selected to test false alarm rate detected by the proposed algorithm. Figure 6d and e are the results of the image on July 26, 2006 when two fire events with 5 and 15 ha extent, respectively were reported by ground truth data (Table 3) shown in Fig. 6f. As mentioned in Table 3, the first one happened from 1:00 to 3:00 pm and the second one from 4:30 to 6:30 pm. According to the image acquisition time (morning), in relation to time of the reported fires, it is likely to miss these events. On the other hand, a single-pixel fire on the top is reported by both algorithms; another one was only detected by the proposed algorithm. For the latter pixel, because the ρ0.86 value is 0.3414, it is omitted in the MODIS contextual algorithm. In other words, selection of the threshold values for potential fire pixels (Giglio et al., 2003), here threshold value of ρ0.86 (0.3) can cause omission errors. Although, we do not found any information about these fires in field data, they are likely to happen in non-forested lands e.g., pasture or farms and not reported. Indeed, according to Fig. 7a-d and 8a-d, these pixels are detected as potential fire pixels by the proposed algorithm. Also, considering images 1 and 3 with respect to image 2 (Table 1), these pixels have potential to be active fires. Referring to the first case, Fig. 9 and 10 show T4 and ΔT values, respectively for a small area around the considering pixel which is indicated in the red rectangular on July 24, 26 and 27, 2006. In Fig. 9b, the T4 value of the given pixel was about 10 K greater than the surrounding pixels, but in Fig. 9a and c, the T4 value of the given pixel doesn’t have major difference with respect to the surrounding.
 | |
| Fig 4: | (a) Local maximum of the T4 profile,(b) local maximum of ΔT profile,(c)local maximum of NDVI profile and (d) potiential of fire pixels selected by the proposed algorithm(indicated by red circle).One row of data on July 24,2006 is used |
 | |
| Fig 5: | (a) Local maximum of the T4 profile,(b) local maximum of ΔT profile,(c)local maximum of NDVI profile and (d) potiential of fire pixels selected by the proposed algorithm(indicated by red circle).One row of data on July 27,2006 is used |
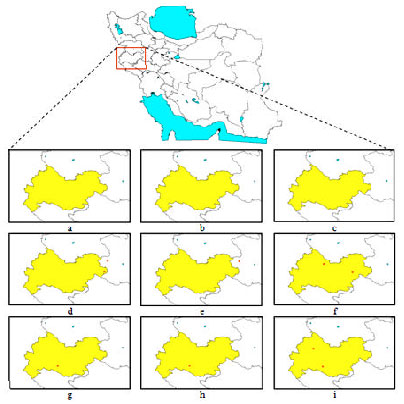 | |
| Fig 6: | Maps showing fire events detected over Karmanshah province (highlighted)by the proposed algorithm MODIS contextual fire detection algorithm(version 4) and ground based measurement on(a-c) July 24,(d-f) July 26,(g-h) July 27,2006,respectively. The red enlarged dots represents the fire detected. |
 | |
| Fig 7: | (a) Local maximum of the T4 profile,(b) local maximum of ΔT profile,(c)local maximum of NDVI profile and (d) potiential of fire pixels selected by the proposed algorithm(indicated by red circle).One row of data on July 27,2006 is used |
 | |
| Fig 8: | (a) Local maximum of the T4 profile,(b) local maximum of ΔT profile,(c)local maximum of NDVI profile and (d) potiential of fire pixels selected by the proposed algorithm(indicated by red circle).One row of data on July 26,2007 is used |
 | |
| Fig 9: | T4 values around the first fire pixel detected by the proposed method indicated by a red rectangular on (a) July 24, (b) July 26 and (c) July 27 2006 |
 | |
| Fig. 10: | ΔT values around the first fire pixel detected by the proposed method indicated by a red rectangular on (a) July 24, (b) July 26 and (c) July 27 2006 |
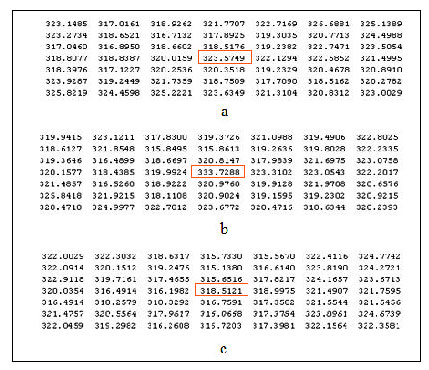 | |
| Fig. 11: | T4 values around the second fire pixel detected by the proposed method indicated by a red rectangular on (a) July 24, (b) July 26 and (c) July 27 2006 |
The ΔT value of the given pixel in Fig. 10b can also be distinguished from the surrounding pixels, but not evidently in Fig. 10 a and c. For the second case, as can be shown in Fig. 11b, the contrast between T4 value of the considered pixel and the neighbors is about 13 K on July 26 2006 but it is not noticeable in Fig. 11a and c. For ΔT, it is about 10 K on July 26 2006 (Fig. 12b) but in Fig. 12a and c ΔT values are comparable. Figure 6g and h show the results of the image taken on July 27, 2006 when three fire events were recorded by ground reconnaissance (Table 3, Fig. 6i).
 | |
| Fig. 12: | ΔT values around the second fire pixel detected by the proposed method indicated by a red rectangular on (a) July 24, (b) July 26 and (c) July 27 2006 |
The reported fires happened in the evening. Notwithstanding the image was observed in the morning, both algorithms have detected one of the reported fires which based on field data, took place from 2:00 to 8:00 pm with 10 ha extent.
DISCUSSION
In this study, we have tested an agent-based approach for regional forest fire detection with a series of MODIS images. As mentioned in lots of literatures (Ichoku et al., 2003) by adapting fire detection algorithms to specific regional contexts, much accuracy improvement could be achieved regionally. Herein, agents encapsulate local and intelligent processing based upon tests used in the MODIS version 4 contextual algorithm (Giglio et al., 2003). They sense and react to a small neighboring region of a number of pre-selected pixels. These pixels are identified based on brightness temperature and NDVI values of a given pixel with respect to those of its surrounding pixels rather than fixed threshold values as opposed to contextual fire detection algorithms (Giglio et al., 2003). During the course of processing, if fire size exceeds a pixel, the considered agent will self-reproduce a number of off-springs to detect remaining fire-contaminated pixels. Indeed, the proposed algorithm was designed to be self-adaptive enough to be applied to any given image at regional scale. For the evaluation purpose the proposed algorithm was compared with the MODIS version 4 contextual algorithm (Giglio et al., 2003). Overall, the visual analysis of the results shows the potential of the proposed approach for fire detection using MODIS data. However, a pixel was detected as a fire event only by the proposed algorithm; it was excluded from computation using specified fixed threshold values for selection of potential fire pixels in the algorithm of Giglio et al. (2003). On the other hand, specification of optimum fixed threshold values is difficult especially in regional scale applications (Csiszar et al., 2003; Giglio et al., 2003; Li et al., 2001, 2003; Wang et al., 2007) and it is necessary to incorporate additional information to achieve more reliable results.
CONCLUSION
This study proposed an agent-based approach for forest fire detection with MODIS imagery at regional scale. The algorithm is based on MODIS contextual fire detection algorithm (version 4). However, it uses spatial information surrounding image pixels for selection of potential fire pixels as well as detection of fire pixels. The results were compared with ground-based measurements and MODIS fire product (version 4). It shows high potential of the proposed algorithm for automatic forest fire detection at regional scale. In fact, it implies that without need to set any fixed threshold value for selection of potential fire pixels, it is possible to achieve good results. Additional algorithm enhancements may be made in future. As an improvement based on our present study, we would investigate an agent-based approach to monitor forest fire events using multi-temporal images, in which one idea is introducing supplementary spatial and temporal tests to obtain more reliable results.
ACKNOWLEDGMENTS
We thank Forest, Range and Watershed Management Organization for providing ground-based measurements and Iranian Space Agency for providing MODIS data.
REFERENCES
- Byun, Y.G., Y. Huh, K. Yu and Y. Kim, 2005. Evaluation of graph-based analysis for forest fire detections. World Acad. Sci. Eng. Technol., 10: 24-29.
Direct Link - Csiszar, I., A. Abuelgasim, Z. Li, J.Z. Jin, R. Fraser and W.M. Hao, 2003. Interannual changes of active fire detectability in North America from long term records of the advanced very high resolution radiometer. J. Geophys. Res., 108: ACL19.1-ACL19.10.
CrossRefDirect Link - Cuomo, V., R. Lasaponara and V. Tramutoli, 2001. Evaluation of a new satellite-based method for forest fire detection. Int. J. Remote Sens., 22: 1799-1826.
CrossRefDirect Link - Giglio, L., J.D. Kendall and C.O. Justice, 1999. Evaluation of global fire detection algorithms using simulated AVHRR infrared data. Int. J. Remote Sens., 20: 1947-1985.
CrossRefDirect Link - Giglio, L., J. Descloitres, C.O. Justice and Y. Kaufman, 2003. An enhanced contextual fire detection algorithm for MODIS. Remote Sens. Environ., 87: 273-282.
CrossRefDirect Link - Ichoku, C., Y.J. Kaufman, L. Giglio, Z. Li, R.H. Fraser, J.Z. Jin and W.M. Park, 2003. Comparative analysis of daytime fire detection algorithms using AVHRR data for the 1995 fire season in Canada: perspective for MODIS. Int. J. Remote Sens., 24: 1669-1690.
CrossRefDirect Link - Kaufman, Y.J., C.O. Justice, L.P. Flynn, J.D. Kendall, E.M. Prins, L. Giglio, D.E. Ward et al., 1998. Potential global fire monitoring from EOS-MODIS. J. Geophys. Res., 103: 32215-32238.
CrossRefDirect Link - Lentile, L.B., Z.A. Holden, A.M.S. Smith, M.J. Falkowski and A.T. Hudak et al., 2006. Remote sensing techniques to assess active fire characteristics and post-fire effects. Int. J. Wildland Fire, 15: 319-345.
CrossRefDirect Link - Li, Y., A. Vodacek, R.L. Kremens, A. Ononye and C. Tang, 2005. A hybrid contextual approach to wildland fire detection using multispectral imagery. IEEE Trans. Geosci. Remote Sens., 43: 2115-2126.
CrossRefDirect Link - Li, Z., Y. Kaufman, C. Ichoku, R. Fraser, A. Trishchenko, L. Giglio, J.Z. Jin and X. Yu, 2001. A Review of Avhrr-Based Active Fire Detection Algorithms: Principles, Limitations and Recommendations. In: Regional Vegetation Fire Monitoring from Space: Planning a Coordinated International Effort, Ahern, F., Goldamer, J. G. and Justice, C. Global (Eds.). SPB Academic Publishing, Hague/Netherlands, pp: 199-225.
- Li, Z., R. Fraser, J. Jin, A.A. Abuelgasim, I. Csiszar, P. Geng, R. Pu and W. Hao, 2003. Evaluation of algorithms for fire detection and mapping across North America from satellite. J. Geophys. Res., 108: ACL20.1-ACL20.14.
CrossRefDirect Link - Liu, J. and Y.Y. Tang, 1999. Adaptive image segmentation with distributed behavior-based agents. IEEE Trans. Pattern Anal. Mach. Intell., 21: 544-551.
CrossRefDirect Link - Robinson, J.M., 1991. Fire from space: Global fire evaluation using infrared remote sensing. Int. J. Remote Sens., 12: 3-24.
CrossRefDirect Link - Wang, W., J.J. Qu, Y. Liu, X. Hao and W. Sommers, 2007. An improved algorithm for small and cool fire detection using MODIS data: A preliminary study in the southern United States. Remote Sens. Environ., 108: 163-170.
CrossRef