
Chao-Lin Kuo
Department of Electrical Engineering, Far-East University, No. 49, Jung-Hwa Road, Hsin-Shih Town Tainan 744, Taiwan, Republic of China
Cheng-Chi Wang
Department of Mechanical Engineering, Far-East University, No. 49, Jung-Hwa Road, Hsin-Shih Town Tainan 744, Taiwan, Republic of China
Neng-Sheng Pai
Department of Electrical Engineering, National Chin-Yi University of Technology, Taichung 411, Taiwan, Republic of China
Journal of Applied Sciences
Year: 2009 | Volume: 9 | Issue: 14 | Page No.: 2635-2639







ABSTRACT
This study introduces a variable structure technology for the synchronization of chaos between two different hyperchaotic systems with input nonlinearity. Based on Lyapunov stability theory, a sliding mode controller and some generic sufficient conditions for global asymptotic synchronization are designed such that the error dynamics of the hyperchaotic Rössler and hyperchaotic Chen systems satisfy stability in the Lyapunov sense in spit of the input nonlinearity. The numerical simulation results demonstrate the validity and feasibility of the proposed controller.
PDF Abstract XML References Citation
How to cite this article
Chao-Lin Kuo, Cheng-Chi Wang and Neng-Sheng Pai, 2009. Design of Variable Structure Synchronization Controller for Two Different Hyperchaotic Systems Containing Nonlinear Inputs. Journal of Applied Sciences, 9: 2635-2639.
DOI: 10.3923/jas.2009.2635.2639
URL: https://scialert.net/abstract/?doi=jas.2009.2635.2639
DOI: 10.3923/jas.2009.2635.2639
URL: https://scialert.net/abstract/?doi=jas.2009.2635.2639
INTRODUCTION
Since, the ideal of synchronizing two identical chaotic systems from different initial conditions was first introduced by Carroll and Pecora, Chaos synchronization has gained a lot of attention among scientists from variety of research fields over the last few years (Carroll and Pecora, 1990, 1991; Chen and Dong, 1998). Chaos synchronization can be applied in the vast areas of physics and engineering science, especially in secure communication (Kocarev and Parlitz, 1995; Murali and Lakshmanan, 1998). In order to achieve the synchronization, a nonlinear controller that obtains signals from the master and slave systems and manipulates the slave system should be designed. Recently, many control methods have been developed to achieve Chaos synchronization between two identical chaotic systems with different initial conditions (Yassen, 2003; Liao, 1998; Fang et al., 1999; Yau et al., 2005, 2006; Yau, 2004). However, most of these methods are only applicable to the Chaos synchronization of two systems that are identical in every aspect and which contain only low dimensional attractors. This is in stark contrast to many real-word applications of the technology. In fact, in systems such as laser array, biological systems and cognitive processes, it is hardly the case that every component can be assumed to be identical. In the area of communications security for example, the adoption of higher dimensional chaotic systems as well as systems with more than one positive Lyapunov exponents has been proposed for use to generate more complex dynamics. Methods are therefore needed to synchronize chaotic systems that are both different and are of high dimensions. Moreover, when the controller is realized in practical physical systems, due to physical limitations of actuators, the nonlinearities in control input do exist. The presence of nonlinearities in control input may cause serious influence of system performance and decrease the system response. Besides, the nonlinearity in control input may cause the chaotic system perturbed to unpredictable results because the chaotic system is very sensitive to any system parameters. Therefore, its effect cannot be ignored in analysis of control design and realization for Chaos synchronization. Thus, the derivation of controller with input nonlinearity for Chaos synchronization is an important problem.
In the study, Ho and Hung (2002), Yassen (2005), Zhang et al. (2006) and Agiza and Yassen (2001) used active control techniques to synchronize two different chaotic systems are either only concerns some low dimension chaotic systems or the input nonlinearity is not discussed. In this case of input nonlinearity, the applications of above method are shown by Ho and Hung (2002), Yassen (2005), Zhang et al. (2006) and Agiza and Yassen (2001) are hard to achieve.
In this study, the goal is to force the two different hyperchaotic Rössler system and hyperchaotic Chen system to be synchronized even if they are subjected to input nonlinearity. The method of active sliding mode control law is applied to control the Chaos synchronization system. The technique requires two stages. The first stage is to select stable sliding surfaces for the desired dynamics and the second stage is to design a switching control law to achieve the stable sliding surfaces. Finally, numerical simulation is carried to confirm the validity of the proposed theoretical approach.
SYSTEM DESCRIPTION AND PROBLEM FORMULATION
In this study, two different hyperchaotic systems included Rössler system and Chen system are described in the follows. In order to observe the synchronization behavior in these two systems, it is assumed that the hyperchaotic Rössler system drives the hyperchaotic Chen system. Therefore, the master and slave systems are shown in the follows:
 | (1) |
Slave system:
 | (2) |
where, φ1(u1), φ2(u2), φ3(u3), φ4(u4) are the nonlinear control inputs attached in the slave system. Let the synchronization error vector state is:
Substitution Eq. 1 and 2 into the error state, the error dynamic equations can be obtained as follows:
 | (3) |
 | |
| Fig. 1: | A scalar nonlinear function φi(ui(t)) inside sector [ςi, ρi], i = 1, 2, 3, 4 |
The ![]() is a continues nonlinear function with φi(0) = 0 and
is a continues nonlinear function with φi(0) = 0 and ![]() is inside sector [ςi, ρi] (i = 1, 2, 3, 4), i.e.,
is inside sector [ςi, ρi] (i = 1, 2, 3, 4), i.e.,
(4) |
where, ςi and ρi are nonzero positive constants. A nonlinear function φi(ui(t)) is shown in Fig. 1.
Now, the sliding surfaces suitable for the application can be defined as:
(5) |
where, Si(t)∈0R and λi is the design parameters which can be determined later. For the existence of the sliding mode (Slotine and Li, 1991), it is necessary and sufficient that:
(6) |
and
(7) |
Therefore, the following sliding mode dynamics can be obtained as:
(8) |
Obviously, if the design parameters λi>0, i = 1, 2, 3, 4, the stability of Eq. 6 are surely guaranteed, that is ![]() . Thus, the slave system will be derived to master system by designing the appropriate signal control inputs ui(t), i = 1, 2, 3, 4. Meanwhile, it is worthy of that the values of parameters λi>0, i = 1, 2, 3, 4, are also relative to the speed of system response.
. Thus, the slave system will be derived to master system by designing the appropriate signal control inputs ui(t), i = 1, 2, 3, 4. Meanwhile, it is worthy of that the values of parameters λi>0, i = 1, 2, 3, 4, are also relative to the speed of system response.
SLIDING MODE CONTROL LAW WITH INPUT NONLINEARITY
We choose a control law of the form:
(9) |
Where:
 |
Based on the control law (Eq. 9), the reaching condition ![]() is guaranteed in the following theorem, that is, the proposed Eq. 9 will derive the Eq. 3 with nonlinear inputs onto the sliding mode s(t) = 0.
is guaranteed in the following theorem, that is, the proposed Eq. 9 will derive the Eq. 3 with nonlinear inputs onto the sliding mode s(t) = 0.
Theorem 1: Consider the error dynamics Eq. 3 with input nonlinearities. The hitting condition of the sliding mode is satisfied, if the control ui(t) is given by Eq. 9 for i = 1, 2, 3, 4.
Proof: Letting the Lyapunov function of the system be:
Then its derivative with respect to time is:
 | (10) |
Where:
 |
Therefore, if:
(11) |
then ![]() , confirming the presence of reaching condition. Thus the proof is achieved completely.
, confirming the presence of reaching condition. Thus the proof is achieved completely.
Remarks: The controller designed in this study is robust. Therefore, we can increase the value of ηi to overcome the effect of disturbances which are bounded. The performance of proposed algorithm is still kept under the disturbance.
NUMERICAL SIMULATIONS
In this simulation, the 4th order Runge-Kutta algorithm was used to solve the sets of differential equations related to the master and slave systems with a time grid of 0.0001. We selected the parameters of the hyperchaotic Rössler system as a1 = 0.25, b1 = 3, c1 = 0.5, d1 = 0.05 and the parameters of the hyperchaotic Chen systems as a2 = 35, b2 = 3, c2 = 12, d2 = 7, κ = 0.5. The initial values of hyperchaotic Rössler and Chen systems are x(0) = [x1(0) x2(0) x3(0) x4(0)] = [-15 -10 20 15], y(0) = [y1(0) y2(0) y3(0) y4(0)] = [10 15 10 5]. In the synchronization example, we selected λ1 = λ2 = λ3 = λ4 = 2 to result in stable sliding modes and the nonlinear inputs are defined as:
(12) |
Furthermore, it is assumed that the slope of nonlinear sectors in these three synchronization examples are ς1 = ς2 = ς3 = ς4 and ρ1 = ρ2 = ρ3 = ρ4 = 0.9 and the parameters γ1 = γ2 = γ3 = γ4 = 5 are selected to satisfy the Eq. 11. The time responses of the hyperchaotic Chen system controlled by the hyperchaotic Rössler system is shown in Fig. 2a-d. It can be see that the slave system synchronizes with the master system in spite of input nonlinearity. Obviously, the synchronization errors converge asymptotically to zero after the control is active at time t = 10 sec in Fig. 3.
 | |
| Fig. 2: | The time history of controlled hyperchaotic Rössler (x1, x2, x3, x4) and Chen (y1, y2, y3, y4) chaotic systems: (a) x1, y1 versus time t, (b) x2, y2 versus time t, (c) x3, y3 versus time t and (d) x4, y4 versus time t |
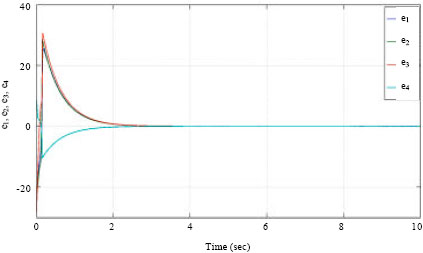 | |
| Fig. 3: | The synchronization time response of error dynamics of controlled hyperchaotic Rössler and Chen systems |
CONCLUSION
In this study, we introduced a sliding mode control technique to synchronize the hyperchaotic Rössler system and hyperchaotic Chen system. Based on Lyapunov stability theorem, an effective control method for synchronizing different chaotic systems has been proposed using variable structure design. The proposed sliding mode control enables stabilization of synchronization error dynamics to zeros asymptotically in spit of input nonlinearity. Numerical simulation results are presented to verify the effectiveness of the proposed synchronization technique. The main feature of this approach is that it gives the flexibility to construct a control law so that the control strategy can be easily extended to any dimensional chaotic systems.
ACKNOWLEDGMENT
The financial support of this research by the National Science Council of the Repulbic of China, under Grant No. NSC 97-2221-E-269 -011 is greatly appreciated.
REFERENCES
- Agiza, H.N. and M.T. Yassen, 2001. Synchronization of rossler and chen chaotic dynamical systems using active control. Phys. Lett. A, 278: 191-197.
CrossRef - Carroll, T.L. and L.M. Pecora, 1991. Synchronizing chaotic circuits. IEEE Trans. Circuits Syst., 38: 453-456.
CrossRefDirect Link - Chen, G. and X. Dong, 1998. From Chaos to Order: Perspectives, Methodologies and Applications. 1st Edn., World Scientific, Singapore, ISBN: 981-02-2569-5.
Direct Link - Ho, M.C. and Y.C. Hung, 2002. Synchronization of two different systems by using generalized active control. Phys. Lett. A, 301: 424-428.
CrossRef - Kocarev, L. and U. Parlitz, 1995. General approach for chaotic synchronization with application to communication. Phys. Rev. Lett., 74: 5028-5031.
CrossRefDirect Link - Liao, T.L., 1998. Adaptive synchronization of two Lorenz systems. Chaos Solitons Fractals, 9: 1555-1561.
CrossRef - Murali, K. and M. Lakshmanan, 1998. Secure communication using a compound signal from generalized synchronizable chaotic systems. Phys. Lett. A, 241: 303-310.
CrossRef - Yassen, M.T., 2003. Adaptive control and synchronization of a modified Chua`s system. Applied Math. Comput., 135: 113-128.
CrossRef - Yassen, M.T., 2005. Chaos synchronization between two different chaotic systems using active control. Chaos Solitons Fractals, 23: 131-140.
CrossRefDirect Link - Yau, H.T., 2004. Design of adaptive sliding mode controller for chaos synchronization with uncertainties. Chaos Solitons Fractals, 22: 341-347.
Direct Link - Zhang, H., W. Huang, Z. Wang and T. Chai, 2006. Adaptive synchronization between two different chaotic systems with unknown parameters. Phys. Lett. A, 350: 363-366.
CrossRef