
M.H. Djavareshkian
Department of Mechanical Engineering, Ferdowsi University of Mashhad, Mashhad, Iran
A. Ghasemi
Department of Mechanical Engineering, University of Tabriz, Tabriz, Iran
Journal of Applied Sciences
Year: 2009 | Volume: 9 | Issue: 11 | Page No.: 2078-2087







ABSTRACT
The objective of this study, is to simulate spray flow with different break-up models and investigate the processes of spray breakup and mixture formation. Effect of these models on the DI diesel engine combustion and performance is also investigated. The 3 Dimensional Naiver-Stokes equation is solved with SIMPLEC algorithm. An eddy break-up combustion model and a diesel auto-ignition model were implemented to simulate the ignition and combustion process in a diesel engine. All the simulations were carried out by the use of FIRE CFD tool. Results were validated via., available experimental data for OM_355 DI diesel engine for mean cylinder pressure. The results show that there have been good agreements between experiments and the CFD calculations. The research demonstrated that practically all the break-up models are capable of simulating the spray processes, as long as model constants are properly chosen and they affect the combustion simulation results.
PDF Abstract XML References Citation
How to cite this article
M.H. Djavareshkian and A. Ghasemi, 2009. Investigation of Jet Break-Up Process in Diesel Engine Spray Modelling. Journal of Applied Sciences, 9: 2078-2087.
DOI: 10.3923/jas.2009.2078.2087
URL: https://scialert.net/abstract/?doi=jas.2009.2078.2087
DOI: 10.3923/jas.2009.2078.2087
URL: https://scialert.net/abstract/?doi=jas.2009.2078.2087
INTRODUCTION
In the last decade 3D-CFD has been successfully established for three dimensional simulations of fluid flow, mixture formation, combustion and pollutant formation in internal combustion engines. In direct injected engines the accuracy of the simulation results and hence their contribution to design analysis and optimization strongly depends on the predictive capabilities of the models adopted for simulation of the injector flow, spray formation and propagation characteristics (Tatschl and Riediger, 1998; Tatschl et al., 1998, 2000).
Since, experiments can be difficult to manage for injection conditions (small-scaled, high-speed flow), a numerical simulation seems to be an appropriate tool to get an interesting model of the flow features inside and at the exit of the injector nozzle. The knowledge of the injector mass flow rate and the flow conditions at the nozzle exit can be a key issue for a successful simulation of all the subsequent processes of mixture formation and eventually combustion and pollutant formation (Ueki et al., 2005). The diesel spray model must perform well for the proper prediction of the entire diesel combustion process. The quality of spray simulation could be judged by comparing global and local spray quantities with those obtained experimentally. Such global quantities comprise spray penetration, spray width and spray angle. Spray simulations involve multi-phase flow phenomena and as such require the numerical solution of conservation equations for the gas and the liquid phase simultaneously. With respect to the liquid phase, practically all spray calculations in the engineering environment today are based on a statistical method referred to as the Discrete Droplet Method (DDM) (Dukowicz, 1980).
Primary/secondary break-up modeling that accounts for the competing effects of turbulence, cavitation and aerodynamic induced break-up processes is based upon the spatially and temporally resolved injector flow data at the nozzle exit. The turbulence induced break-up is accounted for by solving a transport equation for the turbulent kinetic energy and its dissipation rate within the liquid fuel core (Naber and Reitz, 1988). The impact of the collapsing cavitation bubbles on the primary break-up is modeled via., additional source terms in the turbulence model. The turbulence and cavitation induced break-up competes with the aerodynamic one until at a certain distance downstream of the nozzle exit the aerodynamic break-up processes become dominant (Naber and Reitz, 1988). Due to dissipation of the turbulent fluctuations, however, the turbulence induced break-up rate is significantly reduced with increasing distance from the nozzle exit until it becomes negligible at about 2.5 mm downstream of the nozzle tip. The aerodynamic break-up rates show the opposite behavior, i.e., they are very low immediately at the nozzle exit but increase significantly with increasing distance from the nozzle, where the compact liquid core has already been significantly disintegrated due to primary break-up mechanisms. Finally, even at the spray axis high aerodynamic break-up rates can be identified, indicating complete fragmentation of the compact spray core (Naber and Reitz, 1988).
The present study provides an overview of the proper boundary conditions and models required for successful simulation of the spray formation/propagation characteristics in direct injected diesel engines. Individual model results are validated against selected experimental data. For all cases presented in this study the CFD code FIRE is used for simulation of the relevant injector flow and spray formation and propagation processes.
MATERIALS AND METHODS
Computational fluid dynamics simulation
Basic equations: The conservation equations are presented for the following dynamic and thermodynamic properties (FIRE v8.5 Manuals, 2006):
| • | Mass →Equation of continuity: |
(1) |
| • | Momentum (Newton’s second law) →Navier-Stokes Equations: |
 | (2) |
| • | Energy (1st Law of Thermodynamics) →Equation of energy: |
 | (3) |
| • | Concentration of species equation: |
 | (4) |
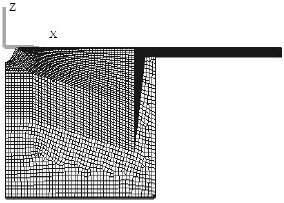 | |
| Fig. 1: | Two-dimensional grid of the modeled engine |
 | |
| Fig. 2: | Multi-block structure of the grid |
Computational grid generation: Based on the geometry description, a set of computational meshes covering 360°CA is created. The mesh generation process is divided into the creation of 2D and 3D mesh. The 2D mesh of the modeled engine is shown in Fig. 1. A 90° sector mesh was used in this study considering that the diesel injector has four nozzle holes. This mesh resolution has been found to provide adequately independent grid results. The multi-block structure of the grid, containing spray and injector blocks, is shown in Fig. 2.
Overview of typical boundary conditions: The wall (surface) temperatures (cylinder liner, cylinder head and piston crown) are based on experimental experiences and depend on the operating point (load and speed). The boundary conditions of the cylinder head are specified as fixed wall, the boundary conditions of the piston bowl as moving wall. In Fig. 3, overview of the selected boundary conditions is shown.
Symmetry boundary conditions are applied to the radius surface along the center axis of the segment mesh. This symmetry boundary conditions might cause problems with calculation results regarding temperature.
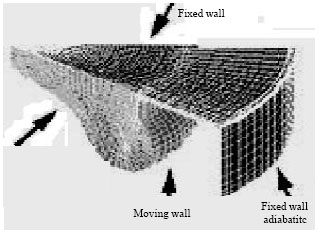 | |
| Fig. 3: | Boundary conditions-overview |
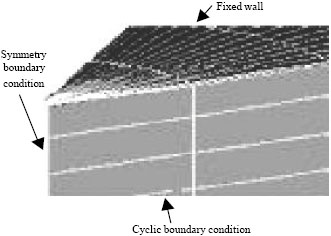 | |
| Fig. 4: | Boundary conditions-details |
In this case adiabatic fixed wall boundary conditions can be specified. In Fig. 4. details of the boundary conditions is shown.
The boundary conditions concerning the additional compensation volume are applied in this way. Faces at the outer, inner and lower side of the volume are specified as moving wall adiabatic (heat flux = 0). Figure 5 shows the moving wall adiabatic boundary conditions.
The faces in polar direction are specified as cyclic boundary conditions. Figure 6 shows selections for cyclic boundary conditions.
Model formulation: The AVL FIREv8.5 CFD tool was implemented to simulate diesel engine combustion. FIRE solves unsteady compressible turbulent reacting flows by using finite volume method. Turbulent flow in the combustion chamber was modeled with k-ε turbulence model. An eddy break-up combustion model was implemented to simulate the combustion process in a diesel engine. The reaction mechanism used for the simulation of the auto-ignition of the diesel fuel is based upon an extended version of the well known SHELL model.
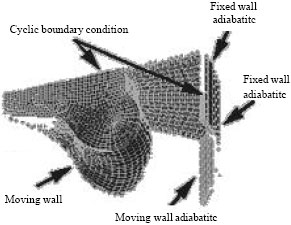 | |
| Fig. 5: | Moving wall adiabatic boundary conditions |
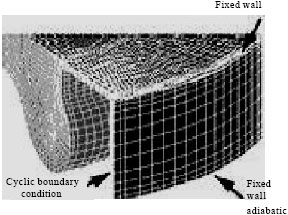 | |
| Fig. 6: | Selections for cyclic boundary conditions |
Auto-ignition model: The SHELL ignition model (Baumgarten, 2006) was implemented as the auto-ignition model in this study. The model uses a simplified reaction mechanism to simulate the auto-ignition of hydrocarbon fuels. The mechanism consists of eight generic reactions and five generic species. The reactions represent four types of elementary reaction steps that occur during ignition, namely, initiation, propagation, branching and termination. The five generic species include fuel, oxygen, radicals, intermediates species and branching agents. These reactions are based on the degenerate branching characteristics of hydrocarbon fuels. The premise is that degenerative branching controls the two-stage ignition and cool flame phenomena seen during hydrocarbon auto-ignition. A chain propagation cycle is formulated to describe the history of the branching agent together with one initiation and two termination reactions.
This model has been successfully applied in diesel ignition studies. It has been found that the rate-limiting step in the kinetic path is the formation of the intermediate species and the ignition delay predictions are sensitive to the pre-exponential factor Af4 in the rate constant of this reaction. Therefore, the above kinetic constant is adjusted to account for fuel effects.
Combustion model: The EBU model (Brink et al., 2000) has been developed assuming that in most technical applications the reaction rates are fast compared to the mixing. Thus, the reaction rate is determined by the rate of intermixing of fuel and oxygen-containing eddies, i.e., by dissipation rate of the eddies. For such a case, the EBU model can be written:
(5) |
where, Y is the mass fraction and rf the stoichiometric coefficient for the overall reaction written on mass basis. A and B are experimentally determined constants of the model, whereas k is the turbulent kinetic energy and ε its dissipation rate. The product dependence for the reaction rate is a deviation from the pure fast chemistry assumption, since the assumption here is that without products the temperature will be too low for reactions. This model assumes that in premixed turbulent flames, the reactants (fuel and oxygen) are contained in the same eddies and are separated from eddies containing hot combustion products. The chemical reactions usually have time scales that are very short compared to the characteristics of the turbulent transport processes. Thus, it can be assumed that the rate of combustion is determined by the rate of intermixing on a molecular scale of eddies containing reactants and those containing hot products, in other words by the rate of dissipation of these eddies. The attractive feature of this model is that it does not call for predictions of fluctuations of reacting species (FIRE v8.5 Manuals, 2006).
Spray and break-up modeling: Currently the most common spray description is based on the Lagrangian discrete droplet method (Burger et al., 2002). While, the continuous gaseous phase is described by the standard Eulerian conservation equations, the transport of the dispersed phase is calculated by tracking the trajectories of a certain number of representative parcels (particles). A parcel consists of a number of droplets and it is assumed that all the droplets within one parcel have the same physical properties and behave equally when they move, break-up, hit a wall or evaporate. The coupling between the liquid and the gaseous phases is achieved by source term exchange for mass, momentum, energy and turbulence. Various sub-models were used to account for the effects of turbulent dispersion (Barata, 2008), coalescence (Post and Abraham, 2002), evaporation (Baugmarten, 2006), wall interaction (Andreassi et al., 2007) and droplet break up (Liu et al., 2008).
Spray model equations: the differential equations for the trajectory and velocity of a particle parcel are as follows (FIRE v8.5 Manuals, 2006):
Momentum:
(6) |
Where:
| Fidr | = | The drag force, given by: |
Fidr = Dp x uirel | (7) |
| Dp | = | The drag function, defined as: |
(8) |
| CD | = | The drag coefficient which generally is a function of the droplet Reynolds number |
| Red and Ad | = | The cross-sectional area of the particle |
| = | A force including the effects of gravity and buoyancy: |
Fig = Vpx(ρp-ρg)gi | (9) |
| Fip | = | The pressure force, given by: |
(10) |
Fib summarizes other external forces like the so-called virtual mass force, magnetic or electrostatic forces, Magnus force or others.
Therefore, inserting above forces and relations into Eq. 6 and dividing it by the particle mass md the equation for the particle acceleration as used by default is:
(11) |
Which can be integrated to get the particle velocity and from this the instantaneous particle position vector can be determined by integrating:
(12) |
Break-up modelling: The atomization of diesel engine fuel sprays can be divided into two main processes, primary and secondary break-up. The former takes place in the region close to the nozzle at high Weber numbers. It is not only determined by the interaction between the liquid and gaseous phases but also by internal nozzle phenomena like turbulence and cavitation. Atomization that occurs further downstream in the spray due to aerodynamic interaction processes and which is largely independent of the nozzle type is called secondary break-up.
The classic break-up models like TAB (Taylor Analogy Break-up), RD (Reitz and Diwakar) and WAVE do not distinguish between the two processes (Dukowicz, 1979). The parameters of these models are usually tuned to match experimental data further downstream in the region of the secondary break-up. Originally, these parameters are supposed to depend only on nozzle geometry, in reality they also account for numerical effects.
Other models like ETAB (Enhanced TAB), FIPA (Fractionnement Induit Par Acceleration) or KH-RT (Kelvin Helmholtz-Rayleigh Taylor) treat the primary break-up region separately (Dukowicz, 1979). Hence, they in principle offer the possibility to simulate both break-up processes independently. The correct values for the additional set of parameters, however, are not easy to determine due to the lack of experimental data for the primary break-up region.
Despite the sometimes tedious tuning of these model parameters the use of break-up models is generally advantageous compared to the initialization of measured droplet distributions at the nozzle orifice. In the first approach the droplets are simply initialized with a diameter equal to the nozzle orifice (blob injection), the droplet spectrum automatically evolves from the subsequent break-up processes. The latter approach gives satisfying results only as long as injection pressure and droplet Weber numbers are low (Tatschl et al., 2002).
In this study we will investigate the WAVE, FIPA and KH_RT break-up models. Here, we give an overview of these models.
WAVE standard: The growth of an initial perturbation on a liquid surface is linked to its wavelength and to other physical and dynamic parameters of the injected fuel and the domain fluid (Liu and Reitz, 1993).
There are two break-up regimes, one for high velocities and one for low velocity Rayleigh type break-up. For the first case the size of the product droplets is set equal to the wavelength of the fastest growing or most probable unstable surface wave. Rayleigh type break-up produces droplets that are larger than the original parent drops. This regime is not important for high pressure injection systems.
As for the Reitz-Diwakar model also for the WAVE model a rate approach for the radius reduction of the parent drops is applied:
(13) |
where, τa is the break-up time of the model, which can be calculated as:
(14) |
The constant C2 corrects the characteristic break-up time and varies from one injector to another. rstable is the droplet radius of the product droplet, which is proportional to the wavelength Λ of the fastest growing wave on the liquid surface:
rstable = C1Λ | (15) |
The recommended default value of C1 taken from the original study of Reitz is 0.61. The wave length Λ and wave growth rate Ω depend on the local flow properties:
(16) |
(17) |
Entering Reynolds Re and Ohnesorge number Oh as well as T = OhxWe0.5.
FIPA: The researchers of this model assume that primary and secondary break-up have to be treated separately (Baritaud, 1997). As the WAVE model was developed from the analysis of perturbations on liquid surfaces it is used for primary break-up. For secondary break-up the experimentally determined equations by Pilch and Erdman (1987) are applied:
 | (18) |
τbu is the non-dimensionalized break-up time for inviscid liquids. The transition from primary to secondary break-up is arbitrarily set at We = 1000. This time the Weber number is calculated with the diameter and not with the radius. To get the break-up time τ for the secondary break-up the following relation is needed:
(19) |
The factor C23 is a constant similar to C2 in the WAVE model. C23 is a function of the void fraction and the constants C2 and C3. The idea is that the break-up process is reduced in cells where the spray is densely packed. C2 is valid for void fractions bigger than 0.99999, C3 for void fractions less than 0.99, values in between are interpolated.
As in the WAVE model, the characteristic break-up time and the stable droplet radius control the gradual break-up process.
(20) |
Contrary to the other models there is an exponential factor C6 and the characteristic break-up time τ is calculated only once at the beginning of the break-up. τs is the elapsed time since the calculation of τ.
KH-RT: In this model Kelvin-Helmholtz (KH) surface waves and Rayleigh-Taylor (RT) disturbances should be in continuous competition of breaking up the droplets (Su et al., 1996; Kunsberg-Sarre and Tatschl, 1998).
The KH mechanism is favored by high relative velocities and high ambient density. The RT mechanism is driven by rapid deceleration of the droplets causing growth of surface waves at the droplet stagnation point. The WAVE model equations (Reitz and Bracco, 1982).
 | (21) |
Simulate the KH break-up. Wec is indicating continuous phase properties and Ohd is indicating droplet properties.
The RT disturbances are described by the fastest growing frequency Ω and the corresponding wave number K.
(22) |
(23) |
Here, g is the deceleration in the direction of travel. If the wave length Λ is small enough to be growing on the droplet’s surface and the characteristic RT break-up time τ has passed, the droplets atomize and their new sizes are assumed to be proportional to the RT wave length. Droplets within the break-up length L:
(24) |
are considered to undergo only KH break-up, whereas further downstream both mechanisms are present. If desired also child droplets can be created by using model parameters C6 and C7. Parameter C6 determines the fraction of the parcel volume which has to be detached until child parcels are initialized, while C7 determines the fraction of the shed mass which is finally transformed into child parcels. Thus it is possible to adjust frequency by C6 and mass of child parcels by C7 independently. The normal velocity component given to the child parcels is calculated from disturbance wavelength and growth rate modified by model parameter C8.
ENGINE SPECIFICATIONS AND OPERATING CONDITIONS
The OM_355 Mercedes Benz diesel engine is used in this simulation. The specifications of mentioned engine are shown in Table 1.
Equation 25 shows how the equivalence ratio in Table 1 is calculated:
(25) |
| Table 1: | OM-355 engine specifications and operating conditions |
 | |
RESULTS AND DISCUSSION
Figure 7 shows the comparison of mean cylinder pressure for present calculation and experimental data (Pirouzpanah, 2003). As it can be seen, the agreement between two results is very good.
One quantity characterizing the average droplet size of a spray and thus the success of spray break-up is the Sauter Mean Diameter (SMD) wich its variation with crank angle is shown in Fig. 8. If standard WAVE model with blob injection (initial droplets have the diameter of the nozzle orifice) is used for the simulation, it can be seen that the SMD has the greater value.
Figure 9 shows spray penetration for different break-up models. The penetration depth shows the temporal development of the path of the spray tip in the combustion chamber. The time-dependent development of the spray penetration length can be divided into two phases. The first phase starts at the beginning of injection (t = 0, needle begins to open) and ends at the moment the liquid jet emerging from the nozzle hole begins to disintegrate (t = tbreak). Because of the small needle lift and the low mass flow at the beginning of injection, the injection velocity is small and the first jet break-up needs not always occur immediately after the liquid leaves the nozzle. During the second phase ( ![]() ,tbreak), the spray tip consists of droplets and the tip velocity is smaller than during the first phase. The spray tip continues to penetrate into the gas due to new droplets with high kinetic energy that follow in the wake of the slower droplets at the tip (high exchange of momentum with the gas) and replace them. The spray penetration increases with time due to the effect that new droplets with high kinetic energy continuously replace the slow droplets at the spray tip.
,tbreak), the spray tip consists of droplets and the tip velocity is smaller than during the first phase. The spray tip continues to penetrate into the gas due to new droplets with high kinetic energy that follow in the wake of the slower droplets at the tip (high exchange of momentum with the gas) and replace them. The spray penetration increases with time due to the effect that new droplets with high kinetic energy continuously replace the slow droplets at the spray tip.
Figure 10 presents the effect of different break-up models on the amount of liquid mass remaining after injection. The KH-RT model exhibits the most amount of liquid remaining.
Figure 11 represents mean cylinder pressure for different break-up models. Figure 11 shows that the results of the FIPA and WAVE models are close. Comparing with Fig. 8, it can be seen that smaller SMD, more surface per unit volume, more effective evaporation and mixture formation in the KH-RT model lead to higher cylinder peak pressure.
Figure 12 shows combustion rate or heat release rate for different break-up models. Figure 12 shows again the close results between FIPA and WAVE models in predicting the heat release rate.
 | |
| Fig. 7: | Comparison of cylinder pressure for model and experiment (Pirouzpanah, 2003) |
 | |
| Fig. 8: | Sauter mean diameter comparison for different break-up models |
Similar to the case of pressure diagrams it can be seen for KH-RT model, more effective evaporation and mixture formation, caused higher rate of heat release during the premixed phase of combustion.
Figure 13 describes the variation of the Sauter Mean Diameter (SMD) distribution during the injection process for WAVE break-up model. The growth of the simulated drops further away from the nozzle was caused by the collision and coalescence model.
It is obvious that the SMD has greater amounts near the nozzle hole and will become smaller far from the nozzle exit due to breakup process.
 | |
| Fig. 9: | Spray penetration comparison for different break-up models |
 | |
| Fig. 10: | Liquid mass remaining |
 | |
| Fig. 11: | Comparison of cylinder pressure for different breakup models |
 | |
| Fig. 12: | Comparison of heat release rate for different breakup models |
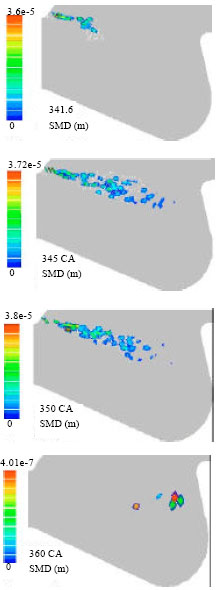 | |
| Fig. 13: | Comparison of SMD in four crank angles |
Although the SMD is a well known quantity in characterizing the spray formation process, it is important to remember that it does not provide any information about the droplet size distribution of the spray. In other words, two sprays with equal SMD can have significantly different droplet size distributions.
CONCLUSIONS
In the present study the spray flow has been simulated with different break-up models and the effect of these models on DI diesel engine combustion and performance was investigated. All the simulations were carried out by the use of FIRE CFD tool. Results were validated with available experimental data for OM_355 DI diesel engine for mean cylinder pressure. There have been good agreements between experiments and the CFD calculations. The following conclusions may be drawn from this study:
It turns out that practically all the break-up models are capable of simulating the processes, as long as model constants are properly chosen.
The KH-RT model exhibits the most amount of liquid remaining.
For all models it can be seen that the SMD has greater amounts near the nozzle hole.
An increase in penetration can be due to reduced break-up.
Reduced penetration, increased spray disintegration and correspondingly faster fuel-air mixing causes more premixed combustion and correspondingly leads to higher cylinder peak pressure.
NOMENCLATURE
| U | : | Velocity (m sec-1) |
| P | : | Pressure (Pa) |
| H | : | Enthalpy (J) |
| T | : | Temperature (K) |
| C | : | Species concentration (mol m-3) |
| k | : | Turbulent kinetic energy (m2 sec-2) |
| : | Mass flow rate (kg sec-1) | |
| Y | : | Mass fraction |
| c | : | Sspecific heat (J kg-1 K-1) |
| rf | : | Stoichiometric coefficient |
Greek symbols | ||
| ρ | : | Density (kg m-3) |
| μ | : | Viscosity (kg m-1 sec-1) |
| φ | : | Equivalence ratio |
| ω | : | Combustion reaction rate (kmol m-2 sec-1) |
| ε | : | Turbulent dissipation rate (m2 sec-3) |
Subscripts | ||
| st | : | Stoichiometric |
| act | : | Actual |
Abbreviations | ||
| DI | : | Direct injection |
| CFD | : | Computational fluid dynamics |
| CA | : | Crank angle |
| EBU | : | Eddy break-up |
| AFR | : | Air/fuel ratio |
| SOI | : | Start of injection |
| SMD | : | Sauter mean diameter |
REFERENCES
- Andreassi, L., S. Ubertini and L. Allocca, 2007. Experimental and numerical analysis of high pressure diesel spray-wall interaction. Int. J. Multiphase Flow, 33: 742-765.
CrossRef - Brink, A., C. Mueller, P. Kilpinen and M. Hupa, 2000. Possibilities and limitations of the eddy break-up model. Combustion Flame, 123: 275-279.
Direct Link - Burger, M., G. Klose, G. Rottenkolber, R. Schmehl and D. Giebert et al., 2002. A combined eulerian and lagrangian method for prediction of evaporating sprays. J. Eng. Gas Turbines Power, 142: 481-488.
CrossRefDirect Link - Dukowicz, J.K., 1980. A particle-fluid numerical model for liquid sprays. J. Comput. Phys., 35: 229-253.
CrossRefDirect Link - Liu, F.S., L. Zhou, B.G. Sun, Z.J. Li and H.J. Schock, 2008. Validation and modification of wave spray model for diesel combustion simulation. Fuel, 87: 3420-3427.
CrossRef - Post, S.L. and J. Abraham, 2002. Modeling the outcome of drop-drop collisions in diesel sprays. Int. J. Multiphase Flow, 28: 997-1019.
Direct Link - Reitz, R.D. and F.V. Bracco, 1982. Mechanism of atomization of a liquid jet. Physics Fluids, 25: 1730-1730.
CrossRef - Barata, J., 2008. Modelling of biofuel droplets dispersion and evaporation. J. Renewable Energy, 33: 769-779.
CrossRef