
Guangzheng Li
Shandong Jiaotong University Maritime College, Weihai, 264200 People�s Republic of China
Tao Wang
Shandong Jiaotong University Maritime College, Weihai, 264200 People�s Republic of China
Information Technology Journal
Year: 2011 | Volume: 10 | Issue: 1 | Page No.: 189-194







ABSTRACT
Grey theory is one of the research methods of uncertainty, which is superior in the mathematical analysis of systems with uncertain information. This study develops a data processing method with grey theory toward data fusion for ship navigation and collision avoidance system. In view of the information complementarities between Automatic Radar Plotting Aid (ARPA) radar and Automatic Identification System (AIS), we fuse AIS information with ARPA radar and present an information fusion framework based on gray theory to provide more accurate and reliable data for ship navigation and collision avoidance system. Owning to the lack of track association based on fuzzy mathematics and statistics, we propose a novel track association algorithm based on grey theory. The simulation results demonstrate that the identification accuracy is 98-99% in the circumstance of about 40 target ships. It has a high matching rate of track association.
PDF Abstract XML References Citation
Received: July 23, 2010;
Accepted: September 17, 2010;
Published: October 19, 2010
How to cite this article
Guangzheng Li and Tao Wang, 2011. A New Model for Information Fusion based on Grey Theory. Information Technology Journal, 10: 189-194.
DOI: 10.3923/itj.2011.189.194
URL: https://scialert.net/abstract/?doi=itj.2011.189.194
DOI: 10.3923/itj.2011.189.194
URL: https://scialert.net/abstract/?doi=itj.2011.189.194
INTRODUCTION
Information fusion is the merging of information from disparate sources with differing conceptual, contextual and typographical representations. A series of new technology was used, such as ontology, grid, topic map, grey theory, etc. (Lu et al., 2010). Grey theory was proposed and developed by Deng (1982). It is a truly multidisciplinary and generic theory that deals with systems that mainly works on systems analysis with poor, incomplete or uncertain messages. The research fields covered by grey theory include system analysis, data processing, modeling, prediction, decision making and control (Hsu and Chen, 2003). Grey forecasting models have been extensively used in many applications (Chang et al., 2001; Li et al., 2007; Lin and Hsu, 2003). AIS (Automatic Identification System) is a short range coastal tracking system used on ships and by Vessel Traffic Services (VTS) for identifying and locating vessels by electronically exchanging data with other nearby ships and VTS stations. The relevant ship information such as unique identification, position, course and speed can be displayed on a screen (Wikipedia, 2010; Norris, 2007).
ARPA (Automatic Radar Plotting Aid) can calculate the tracked object's course, speed and Closest Point of Approach (CPA), thereby knowing whether there is a danger of collision with the other ship or landmass (Parasuraman and Miller, 2004). In view of the information complementarities between ARPA radar and AIS, we fused AIS information with ARPA radar to provide more accurate and reliable data for ship navigation and collision avoidance system.
In this study, we propose a new model of information fusion based on grey theory for ship navigation and collision avoidance system. First, the system framework and MVC structure are designed. Then, a novel track association algorithm based on grey theory is proposed. Finally, simulation experiment is given to elaborate the information fusion process.
SYSTEM FRAMEWORK
We define a system framework of information fusion between AIS and ARPA. It mainly includes data conversion, data fusion and data output, which is shown in Fig. 1.
Data conversion module analyzes AIS and ARPA data and converts them into a uniform intermediate format. AIS information is fused with ARPA radar by data fusion module. Data output module is responsible for maintaining data. The MVC structure is shown in Fig. 2.
Simulation logic controller: simulation logic controller implements the organization and co-ordination of different modules. It includes the following main functions.
 | |
| Fig. 1: | A system framework of information fusion between AIS and ARPA |
 | |
| Fig. 2: | The MVC structure |
| • | Providing analog clock |
| • | Receiving user’s request |
| • | Calling the module to respond user’s request |
| • | Calling radar simulation view to show the processing results |
Simulation view: Simulation view displays the fusion data according to radar interface. It includes the following main functions:
| • | Displaying the fusion data on simulation radar interface |
| • | Sending user;s input to the controller |
| • | Responding controller’s requests and rendering the view |
| • | Receiving the data update requests of data fusion module |
Data fusion: It includes the following main functions:
| • | Preprocessing input data |
| • | Responding the data query requests of simulation view |
| • | Realizing data fusion |
| • | Updating the simulation view |
Data fusion is the core of the system. In order to fuse the AIS with ARPA information, track association must be implemented. It means that ships detected by radar are associated with the ships information provided by AIS. The same ship’s information can be fused.
TRACK ASSOCIATION ALGORITHM
Many researchers have done a lot of work in this area. Track association algorithm based on grey theory is proposed in this study. The algorithm is described as follows:
Step 1: Defining candidate itemsets. Aiming at a track which radar detected, candidate itemsets are selected in AIS data according to the starting point. All starting points of tracks associated with are within a circle, which center is the starting point of and radius is R. is defined as follows:
| (1) |
where, l(k) represents the points on the track. d (l), l* (l)) represents the distance between. R is defined as follows:
| (2) |
where, v (t) represents speed. Δs represents AIS data cycle. σr is radar ranging error, σα is AIS ranging error.
Step 2: Aligning time. We use GM (1,1) model for time-alignment. The GM (1, 1) is one of the most frequently used grey forecasting models. It is a time series forecasting model, encompassing a group of differential equations adapted for parameter variance, rather than a first order differential equation (Hsu and Chen, 2003). The GM (1, 1) model constructing process is described below:
Denote the point sequence by:
| (3) |
The AGO (Aggregating Generation Operation) formation of is defined as:
| (4) |
defines as follows:
| (5) |
The mean sequence of defines as follows:
| (6) |
Where:
| (7) |
The GM (1, 1) model can be constructed by establishing grey differential equation ,which is shown as follows:
| (8) |
where, x0 represents grey derivative. α is development coefficient,is grey action. z1 (k) represents white background value.
Determinate parameters and with Least Square Method is described below:
| (9) |
Where:
 | (10) |
and
 | (11) |
The differential equation corresponding to Eq. 8 is shown as follows:
 |
Equation 12 is albino module of GM(1,1), which general solution is described below:
 | (12) |
Therefore, the solution of Eq. 13 can be obtained by using initial value condition. That is:
| (13) |
| (14) |
| (15) |
We can predict the value of any point in time period by using Eq. 14 and 15.
Step 3: Calculating grey correlation. The point sequence of is l0 = (x0(1), x0(2),...,x0(k),...,x0(n)). We define grey point correlation as follows:
 | (16) |
where, ρ∈(0, 1), li* ∈ S(l). ρ represents resolution ratio.
The grey correlation between l0 and li*0 is defined as follows:
| (17) |
We can calculate the orientation distance grey correlation (σr), azimuth grey correlation (σθ) and speed grey correlation (σv).
Step 4: Calculating the distance (l, li*). We calculate the distance between l and li* based on grey correlation according to three correlation σr, σθ and σv.d(l, li*) is a function of σr (l, li*0), σθ(l0, li*0) and σv(l0, li*0), which is described below:
| (18) |
is associated with ![]() if and only if it is:
if and only if it is:
| (19) |
In order for l and ![]() are close to the minimum distance, we use the correlation distance is defined as follows:
are close to the minimum distance, we use the correlation distance is defined as follows:
 | (20) |
Therefore, the solution of Eq. 20 can be obtained by using Lagrange multiplier method. That is:
| (21) |
Where:
| (22) |
then, Eq. 19 is equivalent to Eq. 23:
| (23) |
Step 5: calculating grey correlation of whole track L:
 | (24) |
L is associated with ![]() if and only if it is:
if and only if it is:
| (25) |
Track association algorithm is given as follows:
(1)σ(L, L*) = 0 (L* ∈ Γ)
(2)Track_match (L, Γ)
(3)While (L is not NULL)
(4)Calculate track section l
(5)L = L-l
(6)Build GM (1, 1) model of l and calculate parameter a and b
(7)For each L* ∈ Γ
(8)Calculate l* ∈ L* in the same duration with l
(9)If (l* is not null and l* ∈ S(l))
(10)Synchronize time stamp of l according to l*
(11)Calculate σ(l, l*)
(12)![]()
(13)End
(14)End
(15)End
(16)Find the maximum and return;
(17)End
EXPERIMENT
We set up AIS and ARPA radar Fusion System (AARFS), which implements antetype solution of information fusion between AIS and ARPA. The objective is to evaluate the effectiveness of the tracks association algorithm based on grey theory. AARFS includes the following main functions:
| • | Simulating the characteristic of all ships running environment based on the inputted parameters |
| • | Sampling AIS and ARPA radar data in accordance with their respective pre-defined period |
| • | Matching the sampling AIS and ARPA radar data |
| • | Displaying the fusion results on ARPA radar screen |
| • | Function Test |
We evaluate our system via different ships, the experimental results is shown in Table 1.
The experimental results shown in Table 1 describe the statistics of AARFS running. The experimental results indicate that AARFS has higher accuracy rate. System operation interface shown in Fig. 3.
| Table 1: | The experimental results of AARFS |
 | |
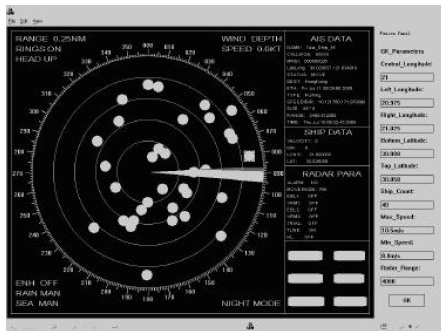 | |
| Fig. 3: | System operation interface |
 | |
| Fig. 4: | The relative error of time alignment interpolation |
 | |
| Fig 5: | The total number of errors |
Performance test: When ship number is 20, the relative errors of time alignment interpolation are shown in Fig. 4.
When ship number is different and fusion step is fixed, the total number of errors is shown in Fig. 5. The experimental results indicate that it has a lower error rate. The recognition accuracy can reach 98-99%. It has a high matching rate of tracks association. With the increase of the number of target ships, information fusion error rate is increased and recognition accuracy rate is decreased.
From the experiment, compared with other relative methods about the tracks association algorithm, such as tracks association based on fuzzy mathematics and statistics, our system is established based on grey theory. The tracks association method based on fuzzy mathematics is more difficult to improve accuracy, because it has great relationship with decision experience. The tracks association method statistics mainly includes weighted method, nearest neighbor method, etc. Statistical methods must filter the data before processing. Filter itself may bring great error, because it is difficult to know the noise statistics of data. Our method based on grey theory is not any special requirements and restrictions for the processed data and its application range is very extensive.
CONCLUSION
In view of the complementarities of the information between ARPA radar and AIS, we establish information fusion architecture between them to provide more accurate and reliable data for navigation and collision avoidance system. Owning to the lack of tracks association based on fuzzy mathematics and statistics. The tracks association algorithm based on grey theory is presented. We implement antetype solution of information fusion between AIS and ARPA radar. Simulation results demonstrate that it has a high matching rate of tracks association and the identification accuracy rate is 98-99% in the circumstances of about 40 target ships. AIS information is fused into ARPA radar to makes up blind area of radar, sea wave clutter interference and radar can not directly identify target ship. It will play a significant role in reducing collisions.
ACKNOWLEDGMENTS
This research is supported by Shandong Jiaotong University Maritime College Scientific Researching Fund Projects under Grant No. Z200726 (July, 2007 to August, 2010); the Key Research Programs of China Institute of Communication Education under Grant No. JJY1001-3 (June, 2010 to August, 2012).
REFERENCES
- Li, G.D., D. Yamaguchi and M. Nagai, 2007. A grey-based decision-making approach to the supplier selection problem. Mathe. Comput. Modell., 46: 573-581.
CrossRefDirect Link - Lin, C.T. and P.F. Hsu, 2003. Forecast of non-alcoholic beverage sales in Taiwan using the grey theory. Asia Pacific J. Market. Logistics, 4: 3-12.
CrossRef - Parasuraman, R. and C.A. Miller, 2004. Trust and etiquette in high-criticality automated systems. Commun. ACM Arch., 47: 51-55.
CrossRef - Hsu, C.C. and C.Y. Chen, 2003. Application of improved grey prediction model for power demand forecasting. Energy Conserv. Manage., 44: 2241-2249.
CrossRef