
Zhang Guo-quan
College of Electrical Engineering and Information Engineering, Lanzhou University of Technology, Lanzhou 730050, China
Li Zhan-ming
College of Electrical Engineering and Information Engineering, Lanzhou University of Technology, Lanzhou 730050, China
Information Technology Journal
Year: 2011 | Volume: 10 | Issue: 7 | Page No.: 1432-1436







ABSTRACT
Aims at the special requirement in speed, accuracy and robustness in vision based Intelligent Vehicle navigation and the computational complexity and difficulty of image processing automatically existing in color image segmentation, a novel method of multi-threshold segmentation based on Rough Set in HSV (Hue,Saturation,Value) for vision based navigation is proposed. First of all, the image is pre-processed in HSV. Secondly, histogram and Advanced Histon Histogram (AHH) are constructed. According to concept of roughness in the theory of Rough Set, the histogram of roughness (RSH) is constructed. Finally, according to requirement of segmentation accuracy, set a threshold Hn on RSH to determine the number and scope of multi-threshold and the image is segmented with above thresholds. The experimental results show that this method can achieve a good segmentation effect.
PDF Abstract XML References Citation
Received: March 03, 2011;
Accepted: May 04, 2011;
Published: June 10, 2011
How to cite this article
Zhang Guo-quan and Li Zhan-ming, 2011. Research on Color Image Segmentation Based on RS for Intelligent Vehicle Navigation. Information Technology Journal, 10: 1432-1436.
DOI: 10.3923/itj.2011.1432.1436
URL: https://scialert.net/abstract/?doi=itj.2011.1432.1436
DOI: 10.3923/itj.2011.1432.1436
URL: https://scialert.net/abstract/?doi=itj.2011.1432.1436
INTRODUCTION
Image segmentation is a process of partitioning an input image into disjoint sub-regions which individually satisfy the properties of homogeneity and connectivity (Cheng et al., 2001). It is a critical and essential step for vision based navigation and determines the accuracy and validity of the navigation. In vision based Intelligent Vehicle navigation, there are some special requirements in image segmentation, it must be real-timely, accurate and robust against illumination variety (Maohai et al., 2011). Because the threshold segmentation method is simple and effective, therefore, it has become one of the most commonly used segmentation method for navigation (Moshashai et al., 2008). The effect of multi-threshold segmentation method relies on the threshold quantity and the value selection. Color image can provide more information than gray level image, so how to search the best threshold accurately and quickly on color image has become very important in vision based navigation (Ouattara et al., 2011).
There are many papers and several surveys on threshold segmentation and the representfvation method such as histogram threshold, max entropy method and fuzzy threshold method etc. (Lin et al., 2005). However most of these methods stress to the gray level image and single threshold segmentation, the reported method fitting to color image multi-threshold segmentation is relatively few.
Chang and Wang (1997) used the low pass and high pass filter to adjust number of the wave peak and valley to obtain the wished class number, then take the valley value as threshold. This method does not consider the spatial information and quite difficult to divide the image has no obvious peak and valley. Qixiang et al. (2004) defined the color roughness and determines the threshold quantity according to color roughness, calculates the threshold number and segment image combining spatial information and color information. But this method mainly aims at gray level images and the method for threshold quantity calculation is short of mathematical theory.
There are insufficiency exists in above threshold segmentation method. In order to achieve real time and robustness in navigation, the color image is pre-processed in HSV space firstly and projects the color image from the three-dimensional space to the two-dimensional surface. H and V components be quantified and stretched. In order to contain spatial information in the Traditional Statistical Histogram (TSH) and get threshold automatically, an Advanced Histon Histogram (AHH) is proposed according to Histon histogram proposes by Mohabey and Ray (2000), at the same time, roughness histogram (RSH) is constructed using roughness concept in RS theory, then according to the segmentation accuracy requirement, a threshold Hn is chosen in RSH to determine the quantity and value of threshold for globe image. The experimental results show that this method can automatically determine the threshold quantity, segment image efficiently and robust against illumination variation and can achieve a good segmentation effect.
THE PRE-PROCESSING OF SCENE COLOR IMAGE
The scene color image is pre-processed in HSV with the method in study (Quan and Ming, 2011) and project the H and V to S. According to accuracy of segmentation, H and V are quantified equality distance on projected S. the quantification formula as Eq. 1:
| (1) |
Hn and Vn are the number of quantification on H component and V component, H (i) and V (i) are the name of H and V after quantified. The meaning of α and β are as same in study of Quan and Ming (2011).
CONSTRUCT OF RSH ON RS THEORY
The rough set theory: RS is a powerful and intellectual tool for data analysis. It can subdivide object and reduce attribute without any prior knowledge (Ma et al., 2009).
Let U≠Ø be a universe of discourse and X be a subset of U. An equivalence relation R, classifies U into a set of subset U/R={X1, X2…, Xn} in which the following conditions are satisfied Xi ⊂U, Xi ∩Xj = Ø and ∪i = 1,2…n Xi = U. Any subset Xi which called a category, class or granule, represents an equivalence class of R. a category in R containing an object xεU is denoted by (x) R. for a family of equivalence relation P⊆R, an indiscernibility relation over P is denoted by IND (P) and is defined as:
| (2) |
The set X can be divided according to the basic sets of R, namely a lower approximation set and upper approximation set. Approximation is used to represent the roughness of the knowledge. Suppose a set x R represents vague concept, then the R-lower and R-upper approximation of X are defined by Eq. 4 and 5:
| (3) |
Equation 4 is the subset of all X, such that X belongs to X in R, is the lower approximation of X:
| (4) |
Equation 5 is the subset of all X that possibly belong to X in R, there by meaning that X may or may not belong to X in R and the upper approximation R contains sets that are possibly included in X. The set BNR (X) = R¯X-R-X is the R-boundary regions of X. the approximate of a set is because of the existing of boundary, In order to express precision of a set, the conception of roughness is defined in RS:
| (5) |
The roughness ρR (X) reflects understanding degree to X by the existing knowledge.
The concept and construction of TSH and AHH: The quantified color set is defined as C, the color progression is L, the image size is M*N, the image which has been pre-processed is S, then the Traditional Statistic Histogram (TSH) defined as Eq. 6:
| (6) |
In Eq. 7, tεC, f (.) is pulse function. h (t) is the histogram in C.
The h (t) in TSH only expresses the times or frequency the pixel that color is t found in the picture. It loses the position information between these pixels, so it does not fit to image division. In order to contain the space relation in histogram, Mohabey and Ray et al. (2000) put forward Histon histogram concept (Mohabey and Ray, 2000), compared with the TSH, Histon consider around pixels which are approximate to the present pixels. Histon histogram is constructed based on TSH, when the sum distance from present pixel to other pixels around it is to surpass a fixed threshold and add 1 upon TSH. This study improve the Histon histogram again, put forward the concept of Advanced Histon Histogram (AHH),the AHH is defined as: when the distance from the present pixels to any pixel around it is to surpass a fixed threshold, then add 1 upon TSH.
Supposes that there are PxQ pixels around present pixels, the distance to around pixel defined as: D (x, y) = d (S (x, y), S (p, q)), pεP, qεQ, d (S (x, y), S (p, q)) is the Euclidean distance between S (x, y) and S (p, q). Defines the partition function k (x, y) as following:
th is the threshold of color approximate degree. Then the AHH is defined as Eq. 7:
| (7) |
The calculation of roughness histogram (RSH): There are some relations between RS theory, TSH and AHH. In TSR, the pixel are divided into different subsets, each pixel definitely belongs to one subset, so it can be regarded as lower approximate in RS but in AHH, each subset also contain the neighboring pixel which color is close to the present pixel therefore, it may be regarded as upper approximate. According to the concept of roughness ρR (X) in RS theory, roughness histogram (RSH) can be constructed on TSH and AHH, as Eq. 8:
| (8) |
In Eq. 9, RS (t) is the roughness of color t, when RS (t) is quite big, it indicates that color t may come into being big joined region, on the contrary, when RS (t) is quite small, it indicates that color t is not come into being big joined region. When some kind of color is noise, it’s roughness is very small. But the proportion of pixels which color is t can not be calculated depends on roughness function alone. In order to divide the image into big joined region, the roughness function is required to revise as Eq. 9:
| (9) |
 | |
| Fig. 1: | Flow chart of navigation color image segmentation based on rough set |
Calculation multi-threshold Based on RSH: Through the above analysis, the information required for image segmentation for navigation can be extracted from RSH, such as threshold quantity and value. The corresponding threshold Hn can be selected according to the requirement of segmentation accuracy, the number of color which value in RSH is to surpass the threshold will be the number of segment threshold, when Hn is big, it may extract big region, on the contrary, the small region can be extract therefore, this method may carry on the segment in the different distinguish degree. And the threshold value is directly the valley value between two peak which RSH value all surpass Hn, this method omits the optimal estimation procedure of threshold value, speeds up the division speed. The flow chart of segmentation as Fig. 1.
EXPERIMENTAL RESULT
In order to validate the effectiveness of proposed method, a lot of scene images were captured by Intelligent Vehicle in different environment and illumination. The program is written on MATLAB platform and simulated on the computer which CPU main frequency is 1.8 G, main memory is 2 G. It needs about 0.05 s to process a 160*120 image. In the experiment, Ts = 0.1, Hn = Vn = 5, Hn = 0.02.
In Fig. 2b is original image, (a) is RSH of (a), Hn is threshold set on RSH, the projection of H component is at left RSH (<6), the projection of V component is at right of RSH (>6). There are four color surpass to Hn, such as red number 2, 3, 4 and 9 on RSH, so the image is divided into four parts, the threshold is the valley value between two color which value surpass to Hn.
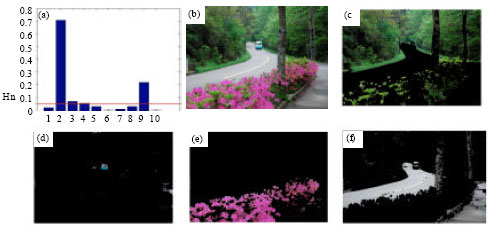 | |
| Fig. 2: | (a-f) The procedure of threshold get from RSH and the segment effect |
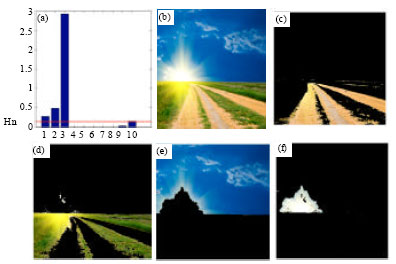 | |
| Fig. 3: | (a-f) The segmentation effect on scenery image |
(c), (d), (e) and (f) are the four parts segmented from (b) using above threshold, the trees, bus, flowers and road is divided perfectly.
Figure 3b is original image, (a) is RSH of (a), (c) (d), (e) and (f) are the road, grassland, sky and sun segmented from (a). The threshold number and values from RSH of (b) are very reasonable, and the sunlight does not affect the effect of segmentation.
CONCLUSION
A multi-threshold color image segmentation method in HSV based on RS theory for Intelligent Vehicle Navigation is presented in this study. Firstly, the image is pre-processed in HSV through color projection and changed the image from three dimensions to two-dimensions. Secondly, the image’s RS histogram (RSH) is constructed on the RS theory. Finally, a threshold Hn is chose on RSH to determine the quantity and value of threshold for globe image. The experimental results shows that this method can determine the threshold quantity automatically, segment image efficiently, robust against illumination variation and can achieve a good segmentation effect.
REFERENCES
- Cheng, H.D., X.H. Jiang, Y. Sun and J. Wang, 2001. Color image segmentation: Advances and prospects. Pattern Recognition, 34: 2259-2281.
CrossRef - Maohai, L., S. Lining, H. Qingcheng, C. Zesu and P. Songhao, 2011. Robust omnidirectional vision based mobile robot hierarchical localization and autonomous navigation. Inform. Technol. J., 10: 29-39.
CrossRefDirect Link - Moshashai, K., M. Almasi, S. Minaei and A.M. Borghei, 2008. Identification of sugarcane nodes using image processing and machine vision technology. Int. J. Agric. Res., 3: 357-364.
CrossRefDirect Link - Ouattara, S., A. Clement and B. Vigouroux, 2011. Full 3D compact histogram segmentation of color images. Asian J. Sci. Res., 4: 42-52.
CrossRef - Chang, C.C. and L.L.Wang, 1997. A fast multilevel thresholding method based on lowpass and highpass filtering. Pattern Recognition Lett., 18: 1469-1478.
CrossRef - Mohabey, A. and A.K. Ray, 2000. Fusion of rough set theoretic approximations and FCM for color image segmentation. Int. Conf. Syst. Man Cybernetics, 2: 1529-1534.
CrossRef - Quan, Z.G. and L.Z. Ming, 2011. Research on preprocessing of color image for vision based mobile robot navigation. Inform. Technol. J., 10: 597-601.
CrossRefDirect Link - Ma, T., J. Leng, M. Cui and W. Tian, 2009. Inducing positive and negative rules based on rough set. Inform. Technol. J., 8: 1039-1043.
CrossRefDirect Link