
Yao-Jen Lai
Department of Mechanical Engineering, Tatung University, Taiwan, Republic of China
Long-Jyi Yeh
Department of Mechanical Engineering, Tatung University, Taiwan, Republic of China
Min-Chie Chiu
Department of Automatic Control Engineering, Chungchou Institute of Technology, Taiwan, Republic of China
Information Technology Journal
Year: 2010 | Volume: 9 | Issue: 8 | Page No.: 1665-1670







ABSTRACT
The issue, here, is to develop a SMA-made bending actuator system used in the medical treatment of an injured finger. To acquire the practical swinging angle and the related heating temperature (Ts) at various loading forces, a series of experimental processes in detecting the above data using an image-captured detecting system via the web camera in conjunction with the VB interface are performed. Five wires of the shape memory alloy (SMA-Ti50Ni45Cu5 with 0.6 mm in Φ and 0.06 m in length) are arranged in parallel with a span of 0.0025 m. The SMA-made wires are connected with two spans (0.0025 and 0.002 m) along the wires using three pieces of plastic rod. Experimental work for investigating the characteristics of the SMA-made bending actuator is performed. Results reveal that under the ambient temperature of 26°C, the finger-shaped bending actuator will provide a bending torque of 0.078NM at a swinging angle of 72° when the SMA-made bending actuator is heated within 33-51°C.
PDF Abstract XML References Citation
Received: May 07, 2010;
Accepted: June 19, 2010;
Published: August 21, 2010
How to cite this article
Yao-Jen Lai, Long-Jyi Yeh and Min-Chie Chiu, 2010. A Study of the Ti50Ni45Cu5-made Dynamic Splints in a Medical Finger Joint. Information Technology Journal, 9: 1665-1670.
DOI: 10.3923/itj.2010.1665.1670
URL: https://scialert.net/abstract/?doi=itj.2010.1665.1670
DOI: 10.3923/itj.2010.1665.1670
URL: https://scialert.net/abstract/?doi=itj.2010.1665.1670
INTRODUCTION
A therapy for hand injuries is a major concern for clinical surgeons and physical therapists. Medical treatment for various injuries such as phalanx fracture, injures to both extensor tendons and flexor tendons and broken fingers, are different. Even if the related therapies (surgical operation, in plaster and hot pack) are different, the subsequent rehabilitation course is compulsory. Rehabilitation for a broken finger is divided into four stages. A fixed-type splint and a rubber band are applied to assist the movement of the injured finger in stages 1-2. However, extra manpower is required to manipulate the fix-type splint (Norkin and White, 2003; Ring et al., 1998). Therefore, there is interest in developing a dynamic splint using a Shape Memory Alloy (SMA).
The concept of the Smart Memory Alloy (SMA), having sensing, actuation and message management, was initiated in the middle of the 1980s. It has been noted that a series of the SMAs such as CuAlNi, CuZnAl, Fe3Pt, NiAl, AgCd have been developed. However, only TiNi and Cu, having steady physical properties, have been widely applied in SMAs. Recently, the Cu series is more popularly used in SMA products due to the price, the increase in recovery and the convenience of manufacturing (Kitamasu and Yoshida, 2001). SMA, a special smart material, has a shape memory effect. The shape of the SMA can be recovered by heating the SMA to a specific temperature even if the SMA has been distorted in advance by an external force (Addington and Schodek, 2004; Benke et al., 2009; Wang, 2004). Therefore, the SMA-made bending actuator is suitable to serve as a dynamic splint in facilitating the finger- rehabilitation process.
SMA-MADE FINGER-JOINT TYPE ACTUATOR
To assess the practical swinging angle and the related heating temperature (Ts) at various loading forces, a series of experimental processes in detecting the above data using an image-captured detecting system via the web camera in conjunction with the VB interface has been established under the financial support of Tatung University (B93-M03-042) in Taiwan. Here, Ti50Ni45Cu5 (0.6 mm in Φ and 0.06 m in length), a SMA material, has been adopted as the bending actuator. The characteristics of the SMA are shown in Table 1. Mirroring the mechanism of the forefinger, a prototype of a bending actuator is established and shown in Fig. 1.
| Table 1: | The characteristic of Ti50Ni45Cu5 |
 | |
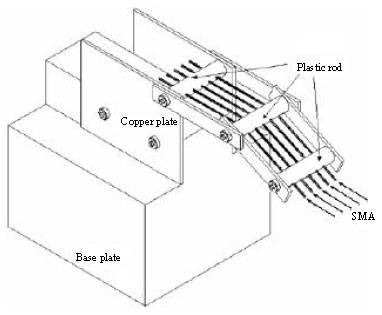 | |
| Fig. 1: | The SMA-made actuator |
 | |
| Fig. 2: | The side view of a finger-joint actuator |
As indicated in Fig. 2, the outline dimension is L100xW50xH65 mm. Here, five wires of the shape memory alloy (SMA-Ti50Ni45Cu5 with 0.6 mm in Φ and 0.06 m in length) are arranged in parallel with a span of 0.0025 m. The SMA-made wires are connected with two spans (0.0025 and 0.002 m) along the wires using three pieces of plastic rod.
Experimental system: In order to detect various angles of the SMA-made actuator, an image-capturing system is constructed and shown in Fig. 3. As shown in Fig. 3, to obtain the related distorted angles of the SMA-made bending actuator, a web camera (Tse and Chan, 2003; Mustafa et al., 2007) is used to capture the image of a loaded bending actuator via the Vguard PCI interface and the Chateau XP/USB protocol. Here, the functions of recording, picturing and viewing are used with the interface of Chateau XP shown in Fig. 4.
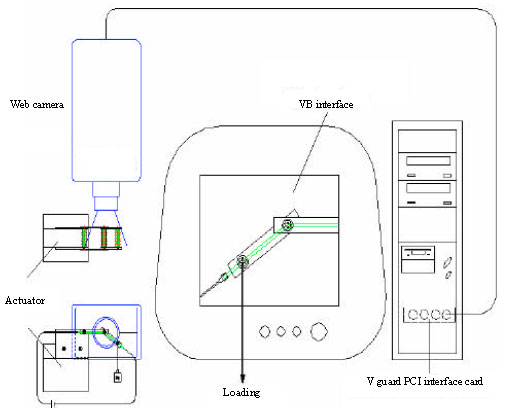 | |
| Fig. 3: | An image-captured system |
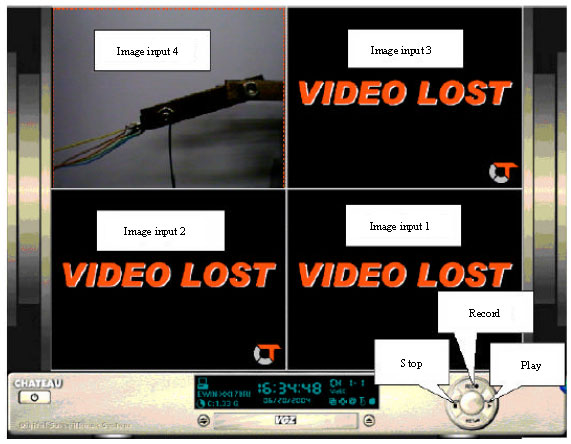 | |
| Fig. 4: | The interface of ChateauXP |
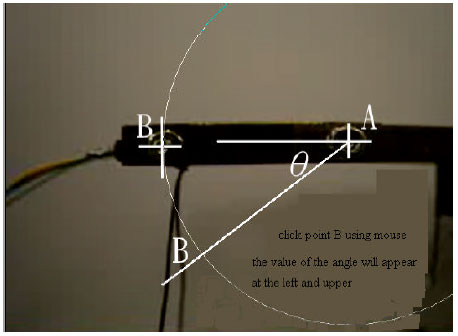 | |
| Fig. 5: | The swinging angle of the bending actuator |
 | |
| Fig. 6: | The nodes of the SMA-made bending actuator heated by the thermocouple |
As indicated in Fig. 5, the angle will be calculated by clicking the point B.
The measurement of operating temperature, swinging angle and loading: As indicated in Fig. 6, to realize the operating temperature of the SMA-made bending actuator, four nodes per each SMA-made string are connected with the thermocouple. Under the ambient temperature of 26°C, the operating temperatures at the nodes will be detected per 0.2 sec by heating the SMA for 30 sec and in turn, cooling the SMA within 90 sec.
Moreover, an investigation of the swinging angle of the SMA-made bending actuator with respected to various loadings (2, 1.5, 1 and 0.5 N) and manipulated electrical circuits (6, 7, 8, 9 and 10 A) is performed. The loading is preset in advance. The image of the bending actuator is captured before and after the electrical circuit is run for 30 sec.
RESULTS AND DISCUSSION
Results: The relationship of the SMA’s operating temperature with respect to various electrical circuits for five SMA-made strings (A, B, C, D, E) is obtained and shown in Table 2-6. It has been seen that the operating temperature (Ts) will be lower than 45°C when the manipulated electrical circuit (I) is below 9 A. Moreover, the operating temperature (Ts) on the surface will reach 51°C and above if the manipulated electrical circuit (I) is more than 10 A.
To appreciate the temperature distribution among four nodes, five temperatures at each node have been averaged. The temperature variation with respect to various electrical circuits for four nodes is plotted in Fig. 7. As can be shown in Fig. 7, the largest difference in temperature between nodes 4 and 1 is 5°C when an electrical circuit of 9 A is manipulated. During the experimental process, it has been seen that the actuator can not be manipulated if the added electrical circuit is lower than 6 A. Therefore, a series of the electrical circuits (6, 7, 8, 9 and 10 A) are tuned step by step. The relationship between the electrical circuit, the swinging angle and the loading is plotted in Fig. 8.
| Table 2: | The operating temperature (Ts) with respect to the electrical circuit (string A) |
 | |
| Table 3: | The operating temperature (Ts) with respect to the electrical circuit (string B) |
 | |
| Table 4: | The operating temperature (Ts) with respect to the electrical circuit (string C) |
 | |
| Table 5: | The operating temperature (Ts) with respect to the electrical circuit (string D) |
 | |
| Table 6: | The operating temperature (Ts) with respect to the electrical circuit (string E) |
 | |
 | |
| Fig. 7: | The temperature variation with respect to various electrical circuits for four nodes |
In reviewing the previous research works in the rehabilitation field, Roznowski and Drzewiecki (2004) applied the SMA in the field of artificial finger. They found that the behavior of SMA is closely related to the operating temperature.
 | |
| Fig. 8: | The relationship between the electrical circuit and the swinging angle and the loading |
Worsnopp et al. (2007) used DC motor as a power resource in bending and stretching motion; however, it is heavy and inconvenient in the finger’s rehabilitation. Sun et al. (2009) used pneumatic muscles as a rehabilitation device. The output force can be adjusted using strain gages and position sensor via a PC-based detecting system; however, the force output is heavy. Rosati et al. (2009) adopted DC motor as an actuator used in controlling the push-pull tendons in a rehabilitation device. The output force can be remotely controlled using a microchip controller in conjunction with a PD theory. However, the rehabilitation device is heavy and complicated. Wang et al. (2009) used DC motor (with an encoder) as a rehabilitation device. The driven force will be transmitted to a sector wheel. However, the rehabilitation device is heavy. Fu et al. (2005) used a CPM (continuous passive motion) as a rehabilitation device for a finger. The output force and angle will be controlled using a linear motor in conjunction with a pulley/rope. However, the rehabilitation device is heavy. Ertas et al. (2009) adopted DC motor as an actuator used in bending and stretching motion for fingers. However, the rehabilitation device is heavy and complicated.
To overcome the drawbacks mentioned above, a study of the SMA-made dynamic splints in a medical finger joint is developed. As has been shown in Table 1-6, the surface temperature (Ts) of the SMA-made bending actuator is proportional to the electrical circuit. Because of the worsening convective effect at the middle allocation, the temperature (Ts) of the string C has been proved to be the highest. Therefore, the span of five strings will influence the heating efficiency when the electrical circuit is added in the SMA-made bending actuator. Moreover, as can be shown in Fig. 7, the temperatures of the heated nodes along the SMA-made string will increase due to the heat accumulation effect. As mentioned above, the minimum electrical circuit to trigger the actuator is 6 A. Figure 8 indicates that, for a specified loading, the swinging angle will be larger if the manipulated electrical circuit increases. It also can be seen that with the same temperature (i.e., with the same electrical circuit) the influence of loading with respect to the swinging angle will increase if the manipulated loading is decreased. Moreover, with the same electrical circuit of 10 A, the related swinging angles for the loading of 1 N and 4 N are 72 and 61°C. Similarly, with the same loading of 1 N, the related swinging angles for various electrical circuits of 6 A and 10 A are 65 and 72°C.
CONCLUSIONS
It has been shown that to develop a dynamic splint for improving the medical treatment of a finger injury, a SMA-made (Ti50Ni45Cu5) bending actuator is suitable. To acquire the practical swinging angle and the related heating temperature (Ts) at various loading forces, a series of experimental processes in detecting the above data using an image-captured detecting system via the web camera in conjunction with the VB interface are performed. The experimental studies indicate that to trigger the actuator, the minimum electrical circuit is 6 A and the related minimum heating time is 30 sec. Moreover, for a specified loading, the swinging angle will be larger if the manipulated electrical circuit increases. It also can be seen that in the circumstance of same temperature for a SMA-made actuator the influence of loading with respect to the swinging angle will increase if the manipulated loading decreases. Also, the range of the SMA’s temperature (Ts) can be controlled within 30-51°C when the manipulated electrical circuits are between 6-10 A and the heating time is 30 sec. With the electrical circuit of 10 A, the related swinging angle at loadings of 1 and 4 N is 72 and 61°C. In addition, under the same electrical circuit of 6 A, the swinging angle will reach 65 and 57°C if the loadings are 1 and 4 N. Under the ambient temperature of 26°C, the swinging angle will reach 72°C and the bending torque will be 0.078 Nm when the loading is 4 N and the SMA’s temperature is within 33-51°C.
ACKNOWLEDGMENT
The authors acknowledge the financial support of the Tatung University (B93-M03-042).
REFERENCES
- Benke, M., V. Mertinger and L. Daroczi, 2009. Investigations of solid phase processes in CuAlNi base shape memory alloys. ESOMAT, 06003: 8-8.
CrossRefDirect Link - Fu, Y., F. Zhang, Z. Ma and Q. Meng, 2005. Development of a CPM machine for injured fingers. Conf. Proc. IEEE. Eng. Med. Biol. Soc., 5: 5017-5020.
PubMed - Kitamasu, M. and M. Yoshida, 2001. Basic study for new type actuator using shape memory alloy. Proceedings of the 23 Annual EMBS International Conference, Oct. 25-27, Istanbul, Turkey, pp: 3135-3137.
Direct Link - Mustafa, G., A.A. Shah, K.H. Asif and A. Ali, 2007. A strategy for testing of web based software. Inform. Technol. J., 6: 74-81.
CrossRefDirect Link - Ring, D., B.P. Simmons and M. Hayes, 1998. Continuous passive motion following metacarpophalangeal joint arthroplasty. J. Hand Surgery, 23: 505-511.
CrossRef - Tse, W.L. and W.L. Chan, 2003. A low cost web-based supply voltage quality monitoring system. Inform. Technol. J., 2: 256-264.
CrossRefDirect Link - Wang, J., J. Li, Y. Zhang and S. Wang, 2009. Design of an exoskeleton for index finger rehabilitation. Conf. Proc. IEEE. Eng. Med. Biol. Soc., 2009: 5957-5960.
PubMed