
Giovanni Leucci
Dipartimento di Scienza dei Materiali, Osservatorio di Chimica, Fisica e Geologia Ambientali, Universita di Lecce-via Arnesano, 73100 Leece, Italy
International Journal of Soil Science
Year: 2006 | Volume: 1 | Issue: 2 | Page No.: 146-167







ABSTRACT
The aim of this study is to test seismic refraction tomography, Electrical Resistivity Tomography (ERT) and Ground Penetrating Radar (GPR) on the cliff and assess the quality of information that they can provide when investigating the physical-mechanical characteristics of the rock. To assess the quality of geophysical information, geophysical data were compared with geological and geomorphological data. In the present research the physical conditions of the cliff of Roca (Lecce, Italy) are examined. The area is of particular interest for the presence of a very important archaeological cave (Grotta della Poesia). Three-dimensional geophysical (seismic refraction tomography, ERT and GPR) survey were carried out. Seismic refraction tomography has been conducted along the free surface of the cliff on 836 m2 area. Results show strong velocity gradients, from 600 to 1200 m s 1. Low velocity zones can be correlated with low quality of the rock mass. ERT survey have also been acquired on the same area along 23 parallel profiles 1m spaced. Results show a larger area with high resistivity variations in the first 0.6 m of the subsoil. In the deep subsoil the results shows a fracture system with NNW-SSE alignment. GPR surveys have also been acquired in the same area of ERT and seismic refraction tomography. A 100 MHZ centre frequency antenna was used. The penetration depth is limited to about 2 m, due to the conductive materials present in the first meter of the subsoil. The main reflectors are near-vertical and most of them can be correlated with fractures. The compared interpretation of geophysical and geomorphological data points out the possible existence of a cavity and a microfractures system that divides in two parts the cliff.
PDF Abstract XML References
How to cite this article
Giovanni Leucci, 2006. Integrated Geophysical, Geological and Geomorphological Surveys to
Study the Coastal Erosion. International Journal of Soil Science, 1: 146-167.
DOI: 10.3923/ijss.2006.146.167
URL: https://scialert.net/abstract/?doi=ijss.2006.146.167
DOI: 10.3923/ijss.2006.146.167
URL: https://scialert.net/abstract/?doi=ijss.2006.146.167
INTRODUCTION
The evolution of the coastline between Roca and Torre dell’Orso (Lecce, Italy), is dominated by cliff retreat, that can be schematized as a cyclical process: after a period of linear undercut erosion, which is a function of the mechanical features of the rock and of wave energy, the cliff collapses; only after the removal of landside debris the linear undercut erosion can start again, preparing a new rock fall (Mastronuzzi et al., 1992).
Time and steps of this cycle depend on three principal factors:
| • | Meteomarine (such as wave energy, frequency and intensity of the sea storms, morphology of the submerged cliff foot, etc.); |
| • | Lithostructural conditions of the bedrock (such as physical-mechanic characteristics, joints system properties, position of layers and fractures, etc.); |
| • | Morphological characteristics (such as cliff height, characteristic profile, furrows and structural surfaces, etc.). |
Evaluating rock-fall hazards means estimating the location, size and probability of occurrence of potential events during a give time, as well as the propagation of the unstable mass.
This paper reports the results of geophysical surveys using Electrical Resistivity Tomography (ERT), seismic refraction tomography and Ground-penetrating Radar (GPR), carried out on the cliff of Roca, located 20 kilometres east from Lecce near the Melendugno village (Apulia Region, southern Italy).
The present research focused on the localization and characterization of potential instabilities.
Evaluating the stability state of a rock is a complex problem, mainly due to the number of possible failure mechanisms and to the lack of knowledge of the real present state of the rock mass.
The location and size of potential rock falls are mainly dictated by joints in the massive rock. The stability assessment is generally based on observations of the cliff morphology as well as on a structural study of the rock mass, including measurements and characterization of the discontinuities observed at the surface. However, even with the most accurate structural observations, the continuity of the fracture properties inside the rock mass is not guaranteed. This point is one of the major problems for hazard assessment in sea cliff areas.
To try to obtain useful information about the internal state of the rock mass, geophysical methods appear as suitable tools. However these methods have seldom been applied to the cliff, mainly due to the practical difficulties of performing tests on such sites. A few geophysical studies have been performed on cliffs to detect and define potentitially unstable masses, using mainly three methods: seismic refraction tomography, ERT and GPR.
In literature many investigations employing several geophysical methods together can be found, like seismic and GPR (Benson, 1992; Cardarelli et al., 2003), or electric with seismic (Cardarelli and Bernabini, 1997), or electric seismic and GPR (Leucci, 2004). Generally, these are applied on the study of tunnel stability and therefore, different from those ones described in the present paper. An example of the combined used of electrical, seismic tomography and gravimetric methods to study coastal erosion was gives by Ranieri et al. (2003). Other applications are related to the use of the GPR method (Grandjean and Gourry, 1996; Orlando, 2003).
However, the use of different methods have resulted in a more accurate definition and interpretation of anomalies.
The present study, which is part of a project on rock-fall hazard assessment in the coast line from Porto Ligno to Torre dell’Orso, Italy (CUIS, 2002), aims at applying some geophysical methods on cliff to investigate the quality of information they can provide in this particular rock mass. A selection was made among the techniques usable on the cliff and the three methods, previously tested in the same area, were applied in order to assess the internal geometrical and physical properties of the rock cliff.
The results are validated with geological, geomorphological and structural data.
The geophysical survey allowed an integrated interpretation very attractive in the definition of main characteristics of the investigated area.
Geological and Geomorphological Setting
The coastline between Roca and Torre dell’Orso (Lecce, Italy) is constituted by cliffs carved in soft calcarenites referable to the Middle-Upper Pliocene. The coastline is regular and composed by a succession of long straight tracts with constant direction (approximately NNW-SSE) interrupted, in correspondence of the archaeological area of Roca, by the presence of short and narrow creeks. Particularly the zone of Roca is elevated about 10 m above mean sea level. In the northern part of the area (Fig. 1), thick layers of calcarenites and calcirudites with abundant macrofossils crop out; they have been referred to the Calcareniti del Salento Pleistocene unit by Largaioli et al. (1969).
 | |
| Fig. 1: | Surveyed area geological map (from Delle Rose and Parise, 2003) |
 | |
| Fig. 2: | Fracture system of the surveyed area (from Delle Rose and Parise, 2003) |
 | |
| Fig.3: | Some karstic caves (black dots) develop at the base of the cliff along the fractures (from Leucci, 2004) |
 | |
| Fig. 4: | Photo-interpretative geomorphological survey (from Leucci, 2004) |
 | |
| Fig. 5: | Spatial distribution of the density of fracture (from Leucci, 2004) |
This bedrock is covered by recent and present beach and dune sands. Landward, the lansdcape grades down to a number of depression, placed at about 1-2 m above m.s.l. and filled by sandy-clayey deposits.
Numerous karstic caves occur in the area, some of them recorded in the regional inventory of the Federazione Speleologica Pugliese (Giuliani, 2000) (such as Grotta dello Spezzale, Grotta della Poesia Grande and Grotta della Poesia Piccola).
The calcarenitic and calcilutitic layers are affected by four systems of fractures, clustering around the directions N-S and E-W (Fig. 2).
These fractures, to a large extent sealed by carbonatic concretions, show varying spacing from some decimeters to some meters. Fractures constitutes the preferential surface of detachment of numerous rockfalls occurring along the coastline. Some karstic caves develop at the base of the cliff along the fractures (Fig. 3).
The photo-interpretative geomorphological survey (Fig. 4) has underlined that the length of the fractures present on a square meter of the cliff surface ranges from 0 to 0.50 meters. The mean value of fracture density is about 0.39 m m-2 (Fig. 5).
The analysis on the spatial distribution of the density of fracture point out a substantial uniformity of the fractures degree. In some small tracts of the coastline the density of fractures increases to about 0.65 m m-2.
Fractures are generally sealed by calcitic concretions; however, some fractures are widened by karstic dissolution. Fractures of this last type show at present openings of the order of some millimeter to some meters in the case of complete development of galleries. Some fractures are partially or totally filled by colluvial deposits.
Fracture Rock Parameters
The degree of fracturing can be estimated by evaluating the ratio between the seismic velocity in the fractured rock and the not-fractured one.
The number of fractures per unit length defines the linear fracture density (Γ). Its value is obtained by counting the number of fractures intersecting a unit length of the scanline.
The fracture density parameter C is defined as (Boadu, 1997):
| (1) |
Where, θi is the orientation of the ith set of fractures (θ = 0° for vertical fractures assuming vertical flow), <·> denotes average, Γ is the linear fracture density and rmin is the smallest fracture length.
The Rock Quality Designation (RQD) parameter, based on number and spacing between fractures, is simply defined as the sum of lengths of rock pieces (intact lengths) or fracture spacings greater than 10 cm expressed as a percentage of the total length of the scanline. Table 1 show the rock quality classification based on RQD parameter.
For an average fracture length L in a given distribution, the discontinuity index (Id) is defined as (Wei et al., 1995):
| (2) |
| Table 1: | Rock quality classification based on RQD parameter |
 | |
The average fracture spacing is by definition the inverse of the linear fracture density.
The fractured rock parameters above described can be used to characterize the mechanical and hydraulic conditions of the material.
Geophysical Test Survey
A test survey was carried out on the cliff using three different geophysical methods:
Electrical Resistivity Tomography (ERT), seismic refraction tomography and ground penetrating radar (GPR). The test survey was undertaken in order to verify the potentialities of used geophysical methods in the particular geological and geomorphological conditions of the site.
Three overlapped profiles (labelled R1, E1 and S1) were performed along direction parallel to the coastline (Fig. 6).
Two array configurations were chosen for the electrical surveys: the Dipole-dipole array was employed to acquire resistivity imaging of buried objects (such as cavities), while the Wenner configuration was used to obtain stratigraphic information. A 48-channel, Syscal R1, Resistivity-meter from IRIS Instruments in multielectrode configuration using 48, 2 m spaced electrodes, has been used.
A high-resolution survey technique with overlapping data levels (Loke, 2001) was chosen to improve data quality, especially at great depth. This technique allows the number of data points to be increased.
In order to obtain a seismic tomography imaging, a 94 m long seismic refraction profile, overlapped with the ERT and GPR profiles, was performed.
The acquisition was achieved using a sledgehammer striking a steel plate as an energy source, with 48, 2 m spaced vertical geophones (100 Hz) and a shot-point for each geophone position.
 | |
| Fig. 6: | The test survey area with the location of geophysical profiles |
The measurements were collected using a Geometric Strataview Seismograph (model Ninbus 1220) with 48 active channels. This method involves the reconstruction of the seismic P-wave velocity (Vp) distribution in the subsoil using travel-time measurements of the seismic waves passing within the subsoil. In subsoil analysis, the distribution of Vp is useful to characterize the materials and to reveal possible buried structures (such as cavities or fractures). Data was stacked at least three times for each source. The software Reflexw 3.0 version, developed by Sandmeier (2002), was used to perform the data processing and to interpret the seismic refraction-wave data.
A SIR System2 manufactured by GSSI equipped with 100 MHZ (center frequency) antenna was used for the GPR survey. The data were acquired using 512 samples per scan, 8 bit data word length, recording time window of 120 ns. Furthermore, data was collected by means of a monostatic configuration in continuous mode. With this configuration, it is possible to evaluate the EM velocity using the characteristic hyperbolic shape of reflection from a point source. The data processing and interpretation was performed using the software Reflexw 3.0.
The results of resistivity tomography obtained with the dipole-dipole and Wenner configuration are illustrated in Fig. 7b and c while the results of the test carried out using seismic and radar techniques are illustrated in Fig. 7d and e.
The subsoil resistivity model (Fig. 7b and c) points out several anomalous zones:
The zones (labelled A) with resistivity values of about 50 Ωm could be due to the presence of cavities or burrows. In fact they are placed in correspondence with caves visible on the cliff from the sea (Fig. 7a). The low resistivity values (50 Ωm) could be due to the fact that the cavities can be filled with clayey residual material or salty water;
The zones (labelled B) with low resistivity values (ρ<10 Ωm) could be attributed to material strongly soaked of salty water.
Furthermore the resistivity model obtained with the Wenner array (Fig. 7c) point out most likely the sea level position.
The results of the inversion of seismic refraction tomography data are shown in Fig. 7d. The model generated by seismic refraction tomography shows the variation of the P-wave velocity (Vp ) in the subsoil.
| Two main zones were interpreted: | |
| • | A surface zone (P-wave velocities 600-800 m s-1); |
| • | A basal refractor (average P-wave velocities 1200-1800 m s-1). The refractor depth ranges from 12 to 15 m (slightly tilted toward SSE). |
High velocities and depth variations in the weathered zone characterize the karstic terrain. The lowest seismic velocities in the first layer (600-800 m s-1) point out a very fractured zone.
Furthermore in the first layer the velocity variations point out the presence of three anomalous zone (labelled A). In these zones the Vp is smaller than 450 m s-1.
Comparing both the Vp variations model (Fig. 7d) and the photo of the cliff (Fig. 7a) is possible to note the correspondence between the position of the anomalous zones (A) and the position of the cavities on the photo. Therefore the anomalous zones in the Vp variations model could be interpreted as cavities.
The analysis of the radar profile (Fig. 7e) shows that below the depth of 1.5 m, whose value was determined using an estimated average electromagnetic (EM) wave velocity of 0.06 m ns-1, the signal is highly attenuated. This result seems to be compatible with the ERT whose results highlighted the presence of a more conductive layer at this level (Fig. 7b and c).
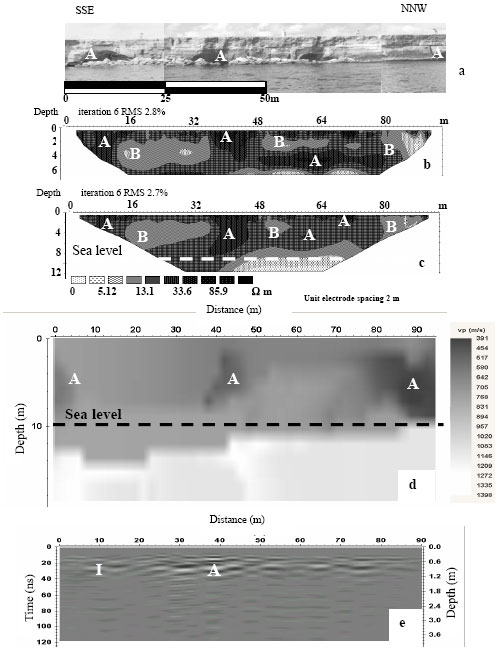 | |
| Fig. 7: | a) Photo of the Roca cliff; b) subsoil resistivity model obtained using the Dipole-Dipole array; c) Subsoil resistivity model obtained using the Wenner array; d) Seismic wave velocity model; e) Processed radar section |
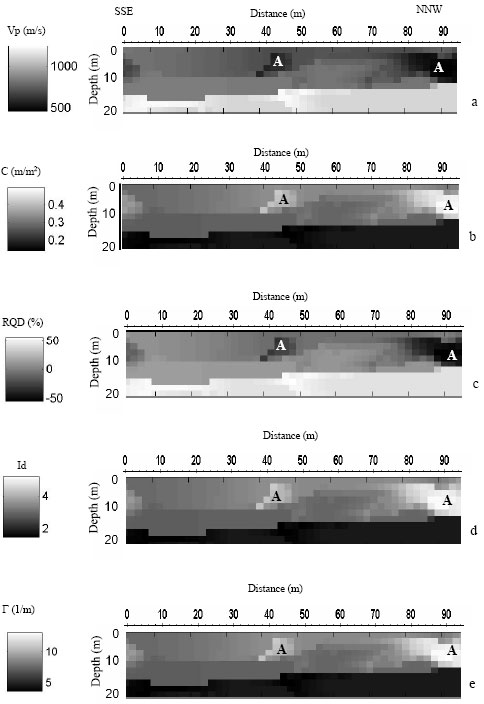 | |
| Fig. 8: | a) Seismic wave velocity (Vp) model; b) Fracture density (C) model; c) Rock Quality Designation factor (RQD) model; d) Discontinuity index (Id) model e) linear fracture density (Γ) model |
Since hyperbolic reflections are present in the data, an accurate velocity analysis was possible. On the other hand the numerous diffractions (I) in the upper portion of the GPR section (Fig. 7e) can be interpreted as possible fractures. The high amplitude anomaly (labelled A) is well correlate with both the resistivity and P-wave velocity anomalies (Fig. 7b, c and d). It could be the ceiling of cavities.
The final step in the interpretation of these three different data sets was to examine the correspondences among them in order to obtain a reliable and consistent model of the subsoil.
ERT and GPR investigations are strongly sensitive to changes in conductive and dielectric properties of the materials involved in the subsoil, which are greatly affected not only by the nature of the materials themselves but also by the presence of moisture in their pores or fractures. In the present case, ERT could distinguish between soil and cavities. On the other hand, the seismic velocity distribution could confirm the presence of some cavities and a fractured zones although its resolution is lower than the other techniques.
Leucci (2004) performed experimental studies in order to investigate the effects of fracture on P and S-wave velocity propagation and therefore the relations between seismic properties and rock mass parameters. The discontinuity index Id, fracture density parameter C, linear fracture parameter Γ and the Rock Quality Designation (RQD) were used to describe the rock mass parameters. These parameters were analyzed and then related to the seismic properties with four empirical relationships:
 | (3) |
Inverting the empirical relationships (3) is possible to obtain the models shown in Fig. 8a-e.
In these models, values assumed by fracture parameters in the zones labelled A don′t have to be considered because they refer to zones with presence of cavities.
The models allow to point out these fracture parameters:
C: 0.26-0.35 m m-2
Γ: 7.7-9.9 1/m
Id: 2.9-3.8
RDQ: <20%
It is important to note the agreement between values of density of fracture (C) (0.17-0.38 m m-2) obtained by the geomorphological data (Fig. 5) and those ones (C) (0.26-0.35 m m-2) obtained by the geophysical data (Fig. 8b).
3D Geophysical Survey
An area 38 by 22 m was selected (Fig. 9) to carry out a series of measures using the seismic refraction tomography, Electrical Resistivity Tomography (ERT) and Ground Penetrating Radar (GPR) methods.
Seismic Refraction Tomography
The 2D seismic wave velocity distribution on a horizontal section located in a determined depth in the subsoil was obtained.
 | |
| Fig. 9: | Surveyed area |
 | |
| Fig. 10: | Geometry of the seismic refraction tomography: a) G is the geophones position; S is the shot position; b) 3d visualization |
The geometry of the survey is shown in Fig. 10-12 vertical geophones (100 Hz), 3 m spaced and 12 shot-points (one for each geophone position) located respectively along two, 24 m spaced parallel lines, were used. Seismic data was collected by means of a Seismograph (model Ninbus 1220) with 12 active channels. This setup allows an area of 33 by 24 m to be covered.
The results obtained in the seismic refraction test profile have pointed out that the first arrival recorded between 20 and 30 m from the source can be related to the seismic ray that have travelling in the first layer located above the sea level. Therefore, the acquisition geometry above described (Fig. 10) allow to investigate the direct arrival travelling within the first layer.
The first step in the refraction tomography survey consists of measuring the traveltimes of seismic wave first arrivals related to source-receiver distances located along the set profile. These traveltimes, Fig. 11a, were picked manually on a PC. To determine the velocity distribution on a two-dimensional section, the traveltimes of each source and each receiver must be combined.
 | |
| Fig. 11: | a) Picked seismogram; b) Travel time curves |
The numerical inversion method used was the Simultaneous Iterative Reconstruction Technique (SIRT) developed by Gilbert (1972). According to this method, presented in detail by Krajewski et al. (1989), a homogeneous starting model is assumed and transformed into a grid to compute the related traveltimes for each ray. The residuals between calculated and observed traveltimes are then used to correct the velocity values along the ray path, giving a new model. This procedure is repeated on the base of a changing model and the iterative process is halted when some stopping criteria are fulfilled, such as when the root mean square of the residual traveltimes is smaller than a prefixed threshold (Sandmeier, 2002).
The model generated by the inversion of seismic refraction data shows variations in the seismic wave velocities within the first meters of the subsoil. Figure12 shows the seismic wave velocity variations model. It is possible to note two seismic velocity areas, labelled A and B, respectively.
The slight lateral variation of the velocity is caused by the low resolution of the method.
Since the low resolution of the short side of the grid, considerations about other significant anomalies can not be drawn here.
The Vp values ranging from about 600 m s-1 to about 800 m s-1, (areas labelled A) could be related to fractured or very porous calcarenite (Leucci, 2004).
The Vp values ranging from about 900 m s-1 to about 1200 m s-1, (areas labelled B) could be related to more compact or high volumetric water content calcarenite (Leucci, 2004).
Inverting the empirical relationships (3) it is possible to obtain the models shown in Fig. 13a-b.
The models allow to point out these fracture parameters:
C: 0.20-0.35 m m-2
Γ: 5.0-9.0 1/m
Id: 2.0-3.5
RQD: 0-50 %
It is important to stress the agreement between the values of density of fracture (C) (0.17-0.38 m m-2) obtained by the geomorphological data (Fig. 5) and those ones (C) (0.20-0.35 m m-2) obtained by the geophysical data (Fig. 13a).
In the surveyed area the rock mass parameters obtained from geophysical data pointed out a fractured, highly permeable rock.
3D Electrical Resistivity Tomography
Data were collected using a dipole-dipole array in a rectangular area of 38 m by 22 m, along 1 m spaced parallel profiles oriented SSE-NNW. Employing 38 electrodes at 1 m intervals, 7128 datum points can be collected.
The first step in the data processing consists of obtaining a pseudo-section by plotting the apparent resistivity versus the depth for each midpoint of a given electrode configuration. The inversion of the data is carried out according to an iterative process which aims at minimising the difference between the measured pseudo-section and the calculated pseudo-section based on a starting model. This model is updated after each iteration until it reaches an acceptable agreement between measured and calculated data or until no further improvements are possible. The Res3dinv resistivity inversion software (Loke, 2001) was used to automatically invert the apparent resistivity acquired data and to yield a three-dimensional resistivity. The smoothness-constrained robust inversion method, presented by Loke and Barker (1996), was applied.
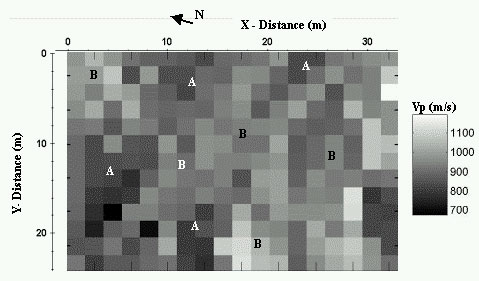 | |
| Fig. 12: | seismic wave velocity variations model |
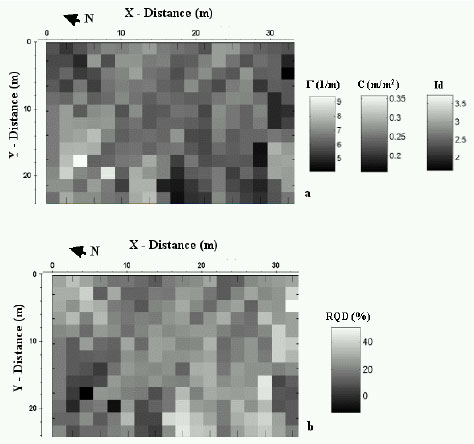 | |
| Fig. 13: | a) Linear fracture density (Γ), fracture density (C) and discontinuity index (Id) models; b) Rock Quality Designation factor (RQD) model |
 | |
| Fig. 14: | 3D resistivity model |
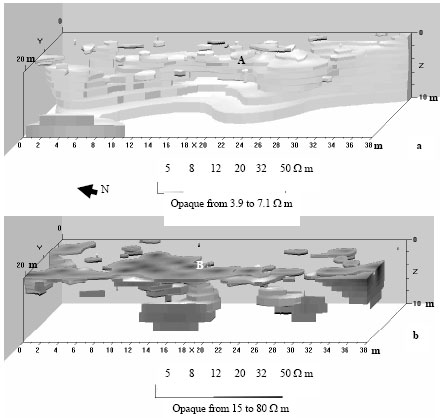 | |
| Fig. 15: | Isoresistivity models: a) 3.9≤ρ≤7.1 ohm m; b) ρ>15 ohm m |
This method, minimising the absolute value of the sum of differences, between measured and calculated resistivity values, produces models with fast transitions across areas of different electrical values, so that even if strong lateral or vertical resistivity variations occur (such as in karstic area) this method can be considered suitable.
The results of the inversion of the electrical data-set are shown in Fig. 14.
It is possible to note a high-resistivity area, labelled C, (about 200 Ω m) in layers 1 and 2. The uppermost layer (layer 1 in Fig. 14) shows a larger area with high resistivity variations over short distances (about from 5 to 200 Ω m). In comparison, layer 2, lying at a depth ranging from 0.60 to 1.20 m, shows more gradual lateral variations in the model resistivity values; here, two zones (labelled A and B respectively) having resistivity values of about 3 Ω m (zone A) and 30 Ω m (zone B) are clearly visible. The two zones are clearly visible also in the layers 3, 4, 5, 6, 7, 8 and 9.
The zone A becomes wider westward as well as depth increases.
The 3D images of resistivity can easily be visualized by 3D contouring of iso-resistivity volumes (Leucci, 2004). In this representation the transparency function is defined by two threshold values of the resistivity, ρ1 and ρ2 (ρ1<ρ2). In the intervals ρ<ρ1 and ρ>ρ2, data is rendered as transparent, therefore only the data in the interval ρ1<ρ<ρ2 is shown. The threshold calibration is a very delicate task. In fact, by lowering the threshold value, not only the visibility of the main anomaly is raised, but also that of the smaller objects and noise increases. In Fig. 15 the resistivity data set is displayed with iso-resistivity volumes using a threshold values:
3.9<ρ<7.1 Ω m (Fig. 15a);
ρ>15 Ω m (Fig. 15b).
The zones (labelled A and B) are more visible.
The ERT survey pointed out an area divided in two parts: the eastern part (toward the sea) (zone Á) and the western part (zone B).
GPR Survey
In the same area surveyed by ERT and seismic refraction tomography methods (Fig. 9), 1m spaced parallel profiles, 39 m long and oriented in an NNW-SSE direction, were acquired using a 100 MHZ antenna and time window 200 ns. Signals were processed with software Reflexw 3.0.
The presence of a conductive materials (as pointed out by ERT survey), causing signal attenuation, reduce electromagnetic (EM) wave depth penetration and therefore reduce the useful time window to about 70 ns.
Fractures can be identified from the properties of their content in terms of nature and size or quantity of air and water or other materials such as clayey detritus. This is possible if fractures are sufficiently open and filled with air or water, or with other materials such as clayey detritus, as in the case of karst, allowing a high amount of radar energy to be back scattered (Grandjean and Gourry, 1996); furthermore, radar wave propagation is influenced by both the relative dielectric permittivity (ε) and the electrical conductivity (σ) of the material through which the radar energy passes (Conyers and Goodman, 1997). Radar signal attenuation is commonly expressed as function of ε and σ parameters. The simplified relationship taken from Davis and Annan (1989) provides a rough estimate of the radar signal attenuation in a particular material:
| (4) |
The Edecember 20, 2005lectromagnetic (EM) wave velocity plays an important role in defining the attenuation. For the frequency band of GPR, the velocity of the EM waves propagating in the ground depends on the relative dielectric permittivity of the material by the simplified equation:
| (5) |
Where, c is the EM wave velocity in empty space (0.3 m ns-1). Hence ε can be determined directly from EM wave velocity. EM wave velocity can be more quickly and easily determined from the reflection profiles acquired in continuous mode, using the characteristic hyperbolic shape of the reflection from a point source (i.e., diffractions; Leucci et al., 2002).
The radar profile obtained in the surveyed area is marked by several hyperbolic reflections (Fig. 16a), which allow an accurate velocity analysis to be carried out. The application of this method points out an average velocity of 0.065 m ns-1. It is possible to note the main EM wave reflection, located at the time depth of about 50 ns (about 1.6 m in depth). This hyperbolic reflection (labelled A) is probably produced by a fractures system.
Radar profile must be processed in order to identify fractures in the calcarenite that constitute the cliff.
| The processing steps were: | |
| • | Gain function removal (Fig. 16b); |
| • | Amplitude compensation (Fig. 16c); in this case the function g(t) is applied on the radar section. The function g(t) consists of a linear and an exponential part (Sandmeier, 2002): |
with
| (6) |
| (7) |
| (8) |
The pulse width is automatically taken from the nominal frequency. The two parameters a′ (linear gain, not dimensional) and α (exponential in dB m-1) are the geometrical spreading and attenuation energy compensation;
| • | Background removal filter (Fig. 16d); the average trace was subtracted to remove the background; |
| • | Kirchhoff migration (Fig. 16d); considering the amount of diffracted signal contained in the data, shown as hyperbolas on the raw data (Fig. 4a), the migration was performed to concentrate the diffracted energy into bright spots; |
| • | Envelopes (Fig. 16e); due to the amount of diffracted arrivals compared to reflected ones, amplitude envelopes were plotted versus time. |
To estimate the average radar energy attenuation in the subsoil the relationships (4) and (5) and the results of the ERT survey, were used. The average attenuation value of about 27.04 dB m-1 was estimated.
Figure 16e shows the processed data. Where radar energy is diffracted, the fractures are characterised by the presence of small discontinuities, representing karstic voids or recrystallyzed zones. Therefore the zones with high back-scattered EM energy (labelled F) are related to intense fractured calcarenite.
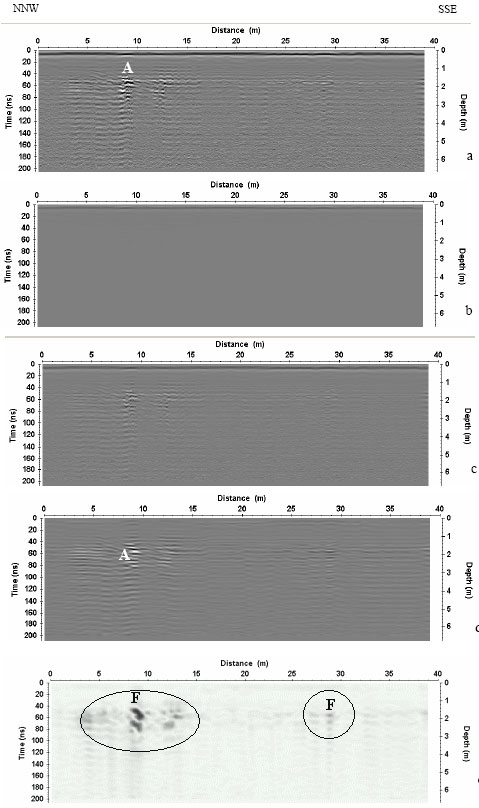 | |
| Fig. 16: | Rocessing steps performed on the radar sections acquired in the surveyed area: a) Raw data; b) Gain function removed; c) Amplitude compensation; d) Background removal and kirchhoff migrated section; e) Enveloped section |
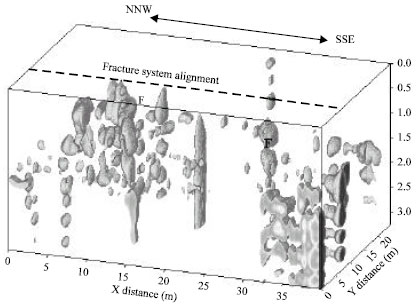 | |
| Fig. 17: | 3D iso-amplitude surfaces using a threshold value of 50% |
An approach for visualizing 3D radar data has been proposed by Zanzi and Valle (1999) for automatic mine detection. In this case, after an appropriate processing of radar data, a 3D image of the sought diffracting or reflecting object could be easily obtained by:
| • | Extraction of the most promising complex signal attributes (trace energy and envelope); |
| • | Thresholding; |
| • | 3D contouring by means of iso-amplitude surface. |
As pointed out by the authors, the threshold calibration is a very delicate task.
In Fig. 17 the GPR data set is displayed with iso-amplitude surfaces using a threshold value of 50% of the maximum complex trace amplitude. Obviously, lowering the threshold value, increases the visibility of the main anomaly and smaller objects, but also heterogeneity noise.
A relatively strong continuous reflection is visible on the 3D volumes (oriented NNW-SSE). In this case the anomaly related to the fracture system is better emphasised.
DISCUSSION
The ERT, GPR and seismic refraction tomography data sets have been compared to integrate the results and to eliminate the intrinsic ambiguity of each method. Plotting the data sets on the same scale the results produce reasonable data correlations and interpretations; combining different data sets minimises the ambiguities in the interpretation and allows the rock quality to be estimated and fracture system close to the ground surface to be located.
To obtain information on rock quality from radar sections, the amplitude of the back scatter signal was analysed. The amount of back scattered energy depends on the quality of the rock (Cardarelli et al., 2003): the greater the degree of fracturing, the greater the energy back scatter and vice versa. With regard to ERT, an estimate of the quality of the investigated rock in terms of resistivity values was carried out. Resistivity values in a good quality calcarenite rock ranges between 500 and 1500 Ω m (Leucci et al., 2003), then a resistivity of about 10 Ω m suggests that the calcarenitic rock is highly fractured and filled with salt water.
The seismic refraction tomography results allowed to estimate the fracture rock parameters in terms of P-wave velocity values. Each of the four properties of the fractured medium bears a quantifiable character that can be used to characterize the mechanical or hydraulic conditions of the medium. The estimate fracture rock parameters values suggests that the calcarenite is highly permeable and the permeability is due to fractures.
It is important to stress the agreement between the values of density of fracture (C) (0.17-0.38 m m-2) obtained by the geomorphological data and those ones (C) (0.20-0.35 m m-2) obtained by the geophysical data.
In the radar section reported in Fig. 16e it is also possible to detect fractures pattern. Fractures are mostly vertical and located one close to each other (zones labeled F).
Comparing ERT, GPR and seismic tomography data it is possible to observe that zones (F), with vertical fractures, corresponds with highly loosened rock and therefore with instability areas of caves.
The proposed 3D visualisation (iso-resistivity and iso-amplitude surfaces) allows a major definition of fracture system confirming the geological and geomorphological results.
In fact 3D visualisation points out that the investigated area is divided in two parts by a probable fracture system with NNW-SSE alignment. Interestingly, ERT survey results puts also in evidence the state of advancement of the erosive wave action. In fact ERT highlights an overall spatial distribution of the resistivity values ranging from 3.9 to 7.1Ω m.
These results show the advantage of combining different methods based on different physical parameters and marked by different sensitivity and resolution.
The integration of ERT, GPR and seismic refraction tomography data eliminates ambiguity in the data interpretation.
From the ERT data the conductivity values allow to estimate the EM energy attenuation in the shallow subsoil, while the GPR suggest the existence of fractured zones.
Seismic refraction tomography data confirm the ERT and GPR results and point out the low qualities of the local calcarenitic bedrock.
In the situations where direct methods such as drilling can not be applied, the ERT and seismic refraction tomography methods are a valid support of the GPR method. In fact the GPR method has a grater resolution than other two methods and therefore allows us to detect isolated fractures and reconstruct their geometry as shown in Fig. 17. The basic disadvantage of the GPR method is that many other heterogeneities appear in the sections that also could be erroneously interpreted as fractures.
CONCLUSIONS
The determination of rock properties is of fundamental importance for the stabilization of a cliff. In this research it was used an integrated interpretation of the results obtained from ERT, GPR and seismic refraction tomography data sets to identify fractures in a calcareous sandstone and therefore to assess its quality in order to perform a preliminary evaluation of the stability of the cliff.
Plotting the data sets on the same scale produces reasonable data correlation and interpretation.
The ERT method provided estimates of the resistivity distribution in the shallow subsoil and, therefore, the mean conductivity distribution that is a very important parameter in the EM energy attenuation calculation. By combining resistivity and P-wave velocity distributions in the subsoil, with the reflection geometry determined from GPR, ambiguities in the interpretation were minimised.
The integration of the three geophysical methods is a useful tool in carrying out geognostic investigations at restricted sites, where invasive techniques such as drillings cannot be performed. The integrated geophysical analyses outlined, in the studied area, a highly unstable region in the zones labeled F. The radar profile indicates very intense anomalies, most likely referable to open fractures.
The 3D map of the condition of the cliff could make possible more effective suggestions in order to obtain suitable conditions for its conservation.
Furthermore is important to underlain that the seismic tomography was used below its potential. In fact, due to the budget problems, was not possible to make a more dense data acquisitions.
ACKNOWLEDGMENTS
The author would like to thank Mrs. Lara De Giorgi, Dr. Letizia Congedi, Dr. Valentino De Santis, Dr. Luca Mazzotta, the technicians, Massimo Luggeri and Giandomenico Fortuzzi, for their precious collaboration during data acquisition.
The author are also grateful to Prof. Paolo Sansò for geomorphological data and Dr. Marco Delle Rose for geological data.
The author is grateful to the reviewers for their valuable comments and remarks.
REFERENCES
- Benson, A.K., 1992. A case study of integrating and modelling seismic, gravity, radar and geotechnical data to identify and characterize shallow geology especially concealed faulting. Proceedings of the 28th Symposium on Engineering Geology and Geotechnical Engineering, 1992, Idaho State University, Rena, NV, pp: 1-17.
- Boadu, F.K., 1997. Fractured rock mass characterization parameters and seismic properties: Analytical studies. J. Applied Geophy., 36: 1-19.
Direct Link - Cardarelli, E. and M. Bernabini, 1997. Determination of parameters of urban waste dumps, two case histories. J. Applied Geophy., 36: 167-174.
Direct Link - Cardarelli, E., C. Marrone and L. Orlando, 2003. Evaluation of tunnel stability using integrated geophysical methods. J. Applied Geophy, 52: 93-102.
CrossRefDirect Link - Davis, J.L. and A.P. Annan, 1989. Ground-Penetrating Radar for high-resolution mapping of soil and rock stratigraphy. Geophys. Prospect., 37: 531-551.
CrossRef - Gilbert, P., 1972. Iterative methods for three-dimensional reconstruction of an object from projections. J. Theor. Biol., 36: 105-117.
PubMedDirect Link - Grandjean, G. and J.C. Gourry, 1996. GPR data processing for 3D fracture mapping in a marble quarry (Thassos, Greece). J. Applied Geophy., 36: 19-30.
CrossRefDirect Link - Leucci, G., S. Negri, M.T. Carrozzo and L. Nuzzo, 2002. Use of ground penetrating radar to map subsurface moisture variations in an urban area. J. Environ. Eng. Geophy., 7: 69-77.
Direct Link - Leucci, G., S. Margiotta and S. Negri, 2003. Geophysical and geological investigations in a karstic environment (salice salentino, lecce, italy). J. Environ. Eng. Geophy., 9: 25-34.
Direct Link - Loke, M.H. and R.D. Barker, 1996. Rapid least-squares inversion of apparent resistivity pseudosections using a quasi-Newton method. Geophys. Prospect., 44: 131-152.
Direct Link - Orlando, L., 2003. Semiquantitative evaluation of massive rock quality using ground penetrating radar. J. Applied Geophy., 52: 1-9.
CrossRefDirect Link