
M.R. Feylizadeh
Department of Industrial Engineering, Islamic Azad University, Shiraz Branch, Iran
M. Bagherpour
Department of Industrial Engineering, Iran University of Science and Technology, Tehran, Iran
International Journal of Manufacturing Systems
Year: 2011 | Volume: 1 | Issue: 1 | Page No.: 1-8







ABSTRACT
This study reviews some of the existing works in production planning literature. Then, we propose an extended approach in which a Multi Period-Multi Product (MPMP) problem is converted into a project management network as an extension the MPMP modeling considering both network concepts and multi objective modeling. According to the literature review, there is no research found with two objective functions. However, in this study, two objective functions are proposed. The first one is to minimize the total cost which includes inventory holding, lost sale, network crashing and overhead costs and the second one is to minimize the time completion of the planning period. Then, by use of multi objective programming techniques the problem can be further solved. Also, the proposed approach simultaneously integrates both project management network and mathematical modeling techniques through a production planning context.
PDF Abstract XML References Citation
Received: April 28, 2010;
Accepted: June 02, 2010;
Published: June 07, 2011
How to cite this article
M.R. Feylizadeh and M. Bagherpour, 2011. Application of Optimization Techniques in Production Planning Context: A Review and Extension. International Journal of Manufacturing Systems, 1: 1-8.
DOI: 10.3923/ijmsaj.2011.1.8
URL: https://scialert.net/abstract/?doi=ijmsaj.2011.1.8
DOI: 10.3923/ijmsaj.2011.1.8
URL: https://scialert.net/abstract/?doi=ijmsaj.2011.1.8
INTRODUCTION
Production planning is one of the most important activities in a production factory. Also, it represents the beating heart of any manufacturing process. Its purpose is to minimize production time and costs, efficiently organize the use of resources and maximize efficiency in the workplace.
Production planning in corporate a multiplicity of production elements, ranging from the everyday activities of staff to the ability to realize accurate delivery times for the customer. With an effective production planning operation at its nucleus, any form of manufacturing process has the capability to exploit its full potential.
Multi-Period Multi-Product (MPMP) problems consist of matching production levels of individual products to the fluctuation of demand for a number of periods, subject to capacity constraints. However, the machine centers capacity constraints and predecessor relationship may not correctly represent the actual solution in practical cases and can lead to an infeasible solution. To overcome this issue, an MPMP problem can be transformed into a project network. It is thus possible to determine the sequence of operations considering the dependencies and precedence logics (Feylizadeh et al., 2008).
These models generally can be divided into deterministic and uncertain ones. Deterministic models are analyzed by optimization techniques, usually based on Linear Programming (LP) or other mathematical programming approaches. Uncertain models include normally probabilistic modeling.
In this research, by considering above mentioned considerations, a multi stage mathematical programming is studied in which the objective is to minimize the total costs, including overhead and crashing costs. On the other hand, since the capacity of machine centers is limited and no more than one task can be processed on a single machine, the model determines the sequence of tasks in different machine centers and in different periods as well as the optimal processing time of each task (Feylizadeh et al., 2008).
LITERATURE REVIEW
Many linear programming models had been carried out in several areas of production planning and control such as traditional material requirement planning. These models usually consider single objective function that minimizes total costs including production costs, inventory costs and shortage costs subject to some constraints e.g., Inventory balance, demand quantity and capacity constraints at each period of time during production planning horizon. In traditional Material Requirement Planning (MRP) will starts with Master Production Schedule (MPS) which show the quantity required to deliver to the customer within specific dates. The MPS is then translated into specific planned start and due dates for all subassemblies and components on the basis of the product structure and subsequently a detailed scheduling problem is solved to meet these due dates (Chen and Ji, 2007). However, MRP normally is not considered capacity constraints, assumes that lead times to be fixed and does not consider operation sequences of items (Billington et al., 1983; Taal and Wortmann, 1997). This creates many problems on the shop floor for later production, such as varying workloads, changing bottleneck, etc. Moreover, the main problem is to face with unfeasible production plan which cause that commitment to the customer will not be delivered on time. In this way, Faaland and Schmitt (1987) proposed a two stage heuristic model to generate feasible schedule. Sum and Hill (1993) proposed a framework to plan manufacturing processes and scheduling systems. Agrawal et al. (1996) applied precedence network to consider operation sequence and developed a heuristic algorithm based on critical path concept.
Deterministic modeling: However, most of researches exist in the literature have been focused on applying optimization techniques or developing efficient heuristic approaches to overcome issues available in MRP context in order to generate a feasible production plan. In this way, Shanthikumar and Sargent (1983) discussed an integrated approach namely hybrid simulation/analytical modeling tempting to use advantages of both simulation and analytical modeling through an unique system. Here, many investigations carried out in the literature incorporating optimization models in MPMP problem. As a good example, initially, Byrne and Bakir (1999) developed a hybrid algorithm by combining mathematical programming and simulation model of a manufacturing system. They pointed out, analytical methods working in co-operation with the simulation model results a better solution in comparison with the individual ones. The obtained production plan can be simultaneously both mathematically optimal and practically feasible. Also in this respect, then, Kim and Kim (2001) proposed an extended linear programming model for hybrid problems. At each simulation run, actual workload of the jobs and utilization of the resources are identified. Information is then passed to the linear programming model for calculating the optimal production plan with the minimal total cost. Byrne and Hossain (2005) proposed an extended linear programming model over (Byrne and Bakir, 1999; Kim and Kim, 2001). In their model, in order to introduce the unit load concept of JIT, work load of jobs was sub-divided. While an optimal plan is sought, due to this unit load concept, the model takes account of the requirement of small lot sizes which is one factor of the JIT approach. Incorporation of the unit load concept and the modification of resource requirements and constraints in the proposed LP formulation are expected to help the improvement of the planning model by reducing the level of WIP (Work in Process) and total flow time (Feylizadeh et al., 2008).
As a related work in considering project and production principles through an analyzing unique system, Noori et al. (2008) proposed a fuzzy control chart application to MPMP problems. However, they considered uncertainty associated with fuzzy control chart and implemented their approach by using earned value analysis.
Although, there are some works regarding crashing, this concept has not been applied in production planning or especially in MPMP problem directly. However, some of related studies are as follows: Goyal (1996) gave a procedure for shortening the duration of a project at low cost. This procedure allows shortening of activities which may have been shortened initially and they happen to be exclusively in the path which has been shortened excessively. Tareghian and Taheri (2006) developed a solution procedure to study the tradeoffs of time, cost and quality in the management of a project. This problem assumes the duration of tasks and quality of project activities to be discrete, non-increasing functions of a single non-renewable resource as normally assumed in the literature. Three inter-related mathematical models are developed such that each model optimizes one of the given entities by assigning desired bounds on the other two. Different forms of quality aggregations and effect of activity mode reductions are also investigated in this study. Deineko and Woeginger (2001) considered the discrete modeling of the well-known time-cost tradeoff problem for project networks which had been extensively studied in the project management literature previously. Bagherpour et al. (2006) presented a new approach to adapt linear programming to solve cost time trade off problems through flow shop scheduling problems. The proposed approach uses two different modeling flowshop scheduling into a leveled project management network. The first model minimizes makespan subject to budget limitation and the second model minimizes total cost to determine optimum makespan over production planning horizon (Feylizadeh et al., 2008).
Probabilistic modeling: There are also some non-deterministic approaches in project crashing problems. Abbasi and Mukattash (2001) introduced and developed a method for investigating the application of mathematical programming to the concept of crashing in Program Evaluation and Review Technique (PERT). The main objective was the minimization of the pessimistic time estimate in PERT networks by investing additional amounts of money in the activities on the critical path. Azaron and Tavakoli-Moghaddam (2007) developed a multi-objective model for the time-cost trade-off problem in a dynamic PERT network using an interactive approach. Feylizadeh et al. (2007) presented an application of Fuzzy Goal Programming (FGP) in a flow shop scheduling problem where two objectives, namely minimizing completion time and minimizing crashing costs are assumed to be considered simultaneously. Laslo (2003) described a stochastic extension of the critical path method time-cost tradeoff model. This extension includes four fundamental formulations of time-cost tradeoff models that represent different assumptions of the effect of the changing performance speed on the frequency distribution parameters of the activity duration, as well as the effect of the random activity duration on the activity cost (Feylizadeh et al., 2008).
PROBLEM STATEMENT
In this study, we study a Multi Period-Multi Product (MPMP) production planning system, which consists of some machine centers (Feylizadeh et al., 2008). Every product has several tasks.
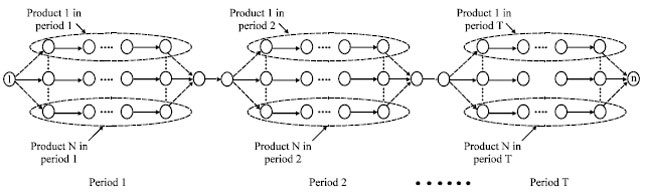 | |
| Fig. 1: | General feature of an MPMP network (Feylizadeh et al., 2008) |
Each task has to be processed in a specific machine center and during a given period. Obviously, in a machine center no more than one task can be carried out simultaneously. The tasks of each product must be processed in a given order, which is specific for that product, although different products have different tasks.
Since, the machine centers facing limited capacities constraints, it is required to match the production level of products to the variation of demands for a number of future periods, while the constraints such as machine centers capacity limits or the precedence relationships between the tasks of each product are considered. General feature of an MPMP network with T periods, N products and n nodes can be shown as Fig. 1.
It is also assumed the processing length of some tasks can be reduced according to system constraints. Although, it causes the corresponding processing cost to be increased. On the other hand, shortening the completion time of a project results in saving overhead (and possibly penalty) costs. Therefore, in this research the optimal processing time of each task in each period (as well as the value of the other decision variables) are determined to minimize the total production cost including producing, holding, shortage, overhead and crushing costs (Feylizadeh et al., 2008).
To obtain an optimal solution for this problem, the problem is converted into a leveled project network. Here, dependencies and precedence relationships between the tasks are considered easily by network structure. However, in order to consider the constraints, such as capacity limitations; avoiding simultaneous processing in machine centers, the network can be then formulated as a binary, nonlinear programming problem efficiently (Feylizadeh et al., 2008).
EXTENDED MATHEMATICAL MODEL
As mentioned earlier, the processing time of a task (or the duration of the network activity which represents that task) can be monitored by the allocation of appropriate amount of resources to the activity. In other words, the duration of an activity can be shortened by consuming more resources. Thus, here, the duration of activities are also considered as decision variables (Feylizadeh et al., 2008).
The proposed multi objective mathematical model: Multi Objective Decision Making (MODM) is a Multiple Criteria Decision Making (MCDM) approach valid for the analysis of decisions in environments surrounded by multi objectives subjected to a set of constraints. Many real world applications involve several objective functions simultaneously. Consider for example the planner whose long-range objectives are: (1) to minimize all cost components of the planning period and (2) to minimize time completion of the planning period. These objectives are not commensurate, which means that they cannot be directly combined or compared. It is extremely rare to have one feasible solution which simultaneously optimizes all of the objective functions. So, optimizing one of the objective functions has the effect of moving another objective function away from its most desirable value. These are the usual conflicts among the objective functions in multi-objective models. Under such conflicts, a multi-objective problem is not really a well-posed problem unless information on how much value of one objective functions can be sacrificed for unit gain in the value of another. Such tradeoff information is usually not available, but when it is available, it makes the problem easier to analyze.
Here, the proposed mathematical model is described. Also, the objective function (1) minimizes the total cost which includes inventory holding, lost sale, network crashing and overhead costs and the objective function (2) minimize time completion of the planning period. Equation (3) controls the inventory balance and it also indicates that backlogging is not allowed. Inequality (4) expresses the capacity constraints of machine centers. Constraint (5) expresses the relationships among the nodes network, that is, it ensures the precedence relations between project activities hold. Constraints (6) and (7) are also used to prevent processing more than one task in a machine center. Following, detail of proposed approach is given which the results maybe found using commercial software such as LINDO®, LINGO® or GAMS® (Feylizadeh et al., 2008). Also, the notations used in this multi objective model are given in appendix.
 | (1) |
| (2) |
| (3) |
| (4) |
| (5) |
| (6) |
| (7) |
| (8) |
| (9) |
| (10) |
Solving procedure: Since, the model is a nonlinear binary programming model, we develop an algorithm solving the MPMP cases. In this proposed algorithm, the crashing of activities is performed iteratively.
Step 0: Set
Step 1: Set
(Then solve the model as developed by Byrne and Bakir, 1999).
| Step 2: | Set Xit equal to the value obtained in step 1 and solve the model again. Obtain the optimal value of Pij. Go to step 1 |
Stopping rule: If the difference between two successive values of objective function is less than an arbitrary value of ε, then stop (Feylizadeh et al., 2008).
In the proposed mathematical model, Eq. 2 has been newly added which is original contribution of the model which has been embedded with multi objective optimization technique which is much more realistic than previous models.
FURTHER POTENTIAL DIRECTIONS
Further potential directions, can be given as follows:
| • | Applying fuzzy multi objective mathematical modeling through MPMP cases. This can be conducted using both symmetric and asymmetric modeling |
| • | Applying stochastic modeling through MPMP cases as an extension to probabilistic modeling |
| • | Since, the model can be embedded with zero-one mixed integer programming models, the MPMP problems, in large scale cases, can be therefore solved using meta-heuristic modeling such as genetic algorithm, simulated annealing, ant colony optimization and so on |
| • | As a continuation of the above mentioned items, the hybrid meta-heuristic modeling by including both constructive and improvement algorithms can be further developed |
| • | Running a comparative analysis for finding the best known solution among all candidate approaches seems to be interesting after conducting several modeling procedures |
| • | Extension of MPMP problems under risky situation is one the main concerns of the manufacturers can be further elaborated by the other researchers |
CONCLUSIONS
This study provides an insight to MPMP problems in different cases. Firstly, an overview of both deterministic and probabilistic models through MPMP environment had been reviewed and then the models and techniques in modeling of the problem were surveyed. Finally, a multi objective linear programming model developed in order to consider the MPMP problem as a project management network. The proposed Multi objective model in this study allows the manufacturer to close the MPMP system to just in time concept. Finally, future potential research had been given for the other researchers.
APPENDIX
Notations
Indexes and parameters:
| t | = | Period index |
| i, j | = | Product index |
| k | = | Machine centers index |
| e | = | Network events index |
| T | = | The number of periods |
| N | = | The number of products |
| K | = | The number of machine centers |
| E | = | Set of network events |
| (r-s) | = | Activity from node r to node s |
| G | = | The set of activities of the network |
| hit | = | Unit holding cost of inventory for product i in period t |
| πit | = | Unit cost of sales lost for product i in period t |
| Mkt | = | Capacity of machine centre k in period t |
| Dit | = | Demand for product i in period t |
| fit | = | Unit variable cost of producing product i in period j |
| H | = | Overhead cost per period of time |
| crs | = | Crash cost per unit time for activity (r-s) |
| = | Normal processing time of activity (r-s) | |
| = | Minimal processing time (crash time) of activity (r-s) | |
| M | = | A big number |
| Ukt | = | The set of the activities which do not have precedence relation, but are processed in machine center k in period t Nkt = {r: (r, s)∈Ukt} |
| Lkt | = | The number of possible permutations of set Nkt A(s) ={r: (r, s) is a product activity of node s} |
Variables:
| Xit | = | Amount of product i to be produced in period t |
| Prs | = | Processing time to produce a unit of activity (r-s) |
| Te | = | Planning date for event e ∈ E |
| Iit | = | End of period inventory of product i in period t |
| Jit | = | End of period deficit of product i in period t |
REFERENCES
- Abbasi, G.Y. and A.M. Mukattash, 2001. Crashing PERT networks using mathematical programming. Int. J. Project Manage., 19: 181-188.
CrossRef - Azaron, A. and R. Tavakkoli-Moghaddam, 2007. Multi-objective time-cost trade-off in dynamic PERT, networks using an interactive approach. Eur. J. Operat. Res., 180: 1186-1200.
CrossRef - Bagherpour, M., S. Noori and S.J. Sadjadi, 2006. Cost-time trade off models application to crashing flow shop scheduling problems. LNCS., 3982: 546-553.
CrossRef - Billington, P.J., J.D. McClain and L.J. Thomas, 1983. Mathematical programming approaches to capacity-constrained MRP systems: Review, formulation and problem reduction. Manage. Sci., 29: 1126-1141.
CrossRef - Byrne, M.D. and M.A. Bakir, 1999. Production planning using a hybrid simulation-analytical approach. Int. J. Prod. Econ., 59: 305-311.
CrossRef - Byrne, M.D. and M.M. Hossain, 2005. Production planning: An improved hybrid approach. Int. J. Prod. Econ., 93-94: 225-229.
CrossRef - Chen, K. and P. Ji, 2007. A mixed integer programming model for advanced planning and scheduling (APS). Eur. J. Operat. Res., 181: 515-522.
CrossRef - Deineko, V.G. and G.J. Woeginger, 2001. Hardness of approximation of the discrete time-cost, tradeoff problem. Operat. Res. Lett., 29: 207-210.
CrossRef - Faaland, B. and T. Schmitt, 1987. Scheduling tasks with due dates in a fabrication-assembly process. Operat. Res., 35: 378-388.
CrossRef - Feylizadeh, M.R., M. Modares and M. Bagherpour, 2008. Optimal crashing of multi period-multi product production planning problems. World Applied Sci. J., 4: 499-505.
Direct Link - Feylizadeh, M.R., M.B. Aryanezhad and M. Bagherpour, 2007. A fuzzy goal programming approach in project time-cost analysis problem: An application to crashing flow shop scheduling. Proceedings of the 2nd International Conference for Modeling, Simulation and Applied Optimization (ICMSAO), March 24-27, 2007.
- Goyal, S.K., 1996. A simple time-cost tradeoff algorithm. Product. Plann. Control, 7: 104-106.
CrossRef - Kim, B. and S. Kim, 2001. Extended model for a hybrid production planning approach. Int. J. Prod. Econ., 73: 165-173.
CrossRef - Laslo, Z., 2003. Activity time-cost tradeoffs under time and cost chance constraints. Comput. Ind. Eng., 44: 365-384.
CrossRef - Noori, S., M. Bagherpour, A. Zareei, 2008. Applying fuzzy control chart in earned value analysis: A New Application. World Applied Sci. J., 3: 684-690.
Direct Link - Shanthikumar, J.G. and R.G. Sargent, 1983. unifying view of hybrid simulation/analytic models and modelling Operat. Res., 31: 1030-1052.
CrossRef - Sum, C.C. and A.V. Hill, 1993. A new framework for manufacturing planning and control systems. Decision Sci., 24: 739-760.
CrossRef - Taal, M. and J.C. Wortmann, 1997. Integrating MRP and finite capacity planning. Product. Plann. Control, 8: 245-254.
CrossRef - Tareghian, H.R. and S.H. Taheri, 2006. On the discrete time, cost and quality trade-off problem. Applied Mathe. Comput., 18: 1305-1312.
CrossRef