
H. Mahi
Centre des Techniques Spatiales, Division Observation de la Terre, 31200, Arzew, Algerie
H.F. Izabatene
Laboratoire Signal Image Parole SIMPA, Department of Computer Science, Faculty of Science, University of Science and Technology of Oran, USTO, Algeria, BP 1505 Oran El M�naouer, Algerie
Asian Journal of Applied Sciences
Year: 2011 | Volume: 4 | Issue: 2 | Page No.: 186-194







ABSTRACT
In this study, a Radial Basis Function Neural Network (RBFNN) is applied for the purpose of satellite image segmentation. During the unsupervised learning of the RBF network, unsupervised Genetic Algorithm (GA) is employed to automatically determine the hidden layer parameters. A comparative study between traditional unsupervised k-means clustering algorithm and the GA has been considered. Therefore, the RBF network as well as the GA has been evaluated on a QUICKBIRD satellite image without and with textural feature. Experimental results show that the RBF network combined to the GA is an attractive approach for segmentation of multispectral remote sensing imagery. Indeed, texture features were helpful for increasing the segmentation accuracy compared to the use of the spectral information alone. This study was carried out as part of research project on images segmentation using a new approach started March 2009 at the earth observation division, Center of Space Techniques, Arzew, Algeria.
PDF Abstract XML References Citation
Received: March 29, 2010;
Accepted: July 12, 2010;
Published: August 23, 2010
How to cite this article
H. Mahi and H.F. Izabatene, 2011. Segmentation of Satellite Imagery using RBF Neural Network and Genetic Algorithm. Asian Journal of Applied Sciences, 4: 186-194.
DOI: 10.3923/ajaps.2011.186.194
URL: https://scialert.net/abstract/?doi=ajaps.2011.186.194
DOI: 10.3923/ajaps.2011.186.194
URL: https://scialert.net/abstract/?doi=ajaps.2011.186.194
INTRODUCTION
Image segmentation is an important analysis step in image processing. It is generally required in some interpretation and decision schemes. By definition, segmentation is a process of partitioning a given image into regions satisfying a certain criteria. These components can be used as primitive inputs of an identification scheme, characterization and interpretation of the image content. Image segmentation algorithms can be classified into two basic categories (Pal and Pal, 1993; Ball and Bruce, 2007): edge-based and region-based segmentation. In the first category, the approach consists of partitioning an image based on abrupt changes of the intensity, such as edges. In this approach, the image is scanned line by line in order to detect gradient maxima. In the second category, the main algorithms are based on partitioning an image into regions that are similar according to a set of predefined criteria, such as intensity or texture. Both techniques have their advantages and their drawbacks. Edge detection produces generally non-connected boundaries which makes it inappropriate for some applications. Extensive post-processing may be required to obtain a better segmentation quality. Despite the closed regions guarantee, region-based techniques suffer from a number of problems. Usually, they have complex control structures. Moreover, the region boundaries are generally distorted (Jiang and Bunke, 1999). New approaches have been proposed recently, such as mathematical morphology segmentation, cooperative region-edge segmentation, hybrid unsupervised segmentation by Hidden Markov Chains or those based on level sets. Our approach belongs to these new approaches. Therefore, we propose a model which combining RBF and GA for multispectral remote sensing images segmentation.
The RBF neural networks are widely used for classification, approximating functions, etc. due to its rapid training, generality and simplicity over feed-forward backpropagation neural network (Ozyilmaz et al., 2002). The RBF network training is divided into unsupervised and supervised stages. Generally, the unsupervised stage is crucial because the performance of the RBF network it depends. In this stage, we try to find centers and widths of hidden layer neurons. Several techniques are employed: randomly selection from training data, supervised procedures and unsupervised procedures such as Self Organizing Map (Iftene et al., 2003), Growing Neural Gas (Mahi et al., 2007). Once the centers are identified, the widths are computed. The supervised stage consists of determine the weights between an input and hidden layer by using delta rule.
In this study, the centers and widths are computed by using the unsupervised k-means clustering algorithm and unsupervised genetic algorithm. Once the hidden layer parameters are determined, the weights are adjusted by least square method. The RBF-GA neural network is applied to multispectral remote sensing image with textural information.
MATERIALS AND METHODS
The rbf neural net: The RBF network is a fully interconnected feed-forward network with one hidden layer (Venkatesan and Anitha, 2006; Zhang and Huang, 2004) (Fig. 1). It can be mathematically described as follows:
| (1) |
where, Zj is the activation of the j-th output neuron, M is the number of the hidden neurons, Wmj is the weight between m-th hidden and j-th output neuron and bj is the bias term. The output of hidden layer neuron is usually generated by a Gaussian function as follows:
| (2) |
Here, x represents the input vector, μm the fixed center position and σm represents the fixed width of the m-th hidden layer neuron.
 | |
| Fig. 1: | RBF architectural neural network |
LEARNING PROCEDURE OF RBF NEURAL NETWORK
In this study, the learning of a RBF network is divided into two independently stages. In the first one, k-means clustering algorithm and Genetic algorithm on the inputs data x have been employed to determine the parameters of the basis functions μ and σ. The second one is a supervised learning in which the weights and biases are determined and adjusted; this is done by minimizing mean square error E (Eq. 5) between the desired outputs and calculated outputs.
Weights and biases are determined by the linear equations as follows:
| (3) |
| (4) |
Here, i is the number of iterations, α and γ are the steps-size.
The mean square error E is given by:
| (5) |
where, tj(q) is the desired output value of the j-th output neuron for the q-th input vector.
GENETIC ALGORITHM FOR CENTERS IDENTIFICATION
Genetic Algorithms (GAs) are based on the process of natural evolution. They are adaptive methods which may be used to solve search and optimization problems (Babu and Rao, 2006; Dep, 1998). The first step in the GA is to randomly generate an initial population = {L1,L2,... ....,Ln}, where, Li is the chromosome in the current population. Each chromosome is encoded in the form of string and consists of randomly selected group of pixels from an image I. The fitness function fitness (L) of each chromosome in the current population at iteration t is equal to the inverse of the minimum distance between the cluster centre and assigned pixel. At the end of iteration t, a new population will be created applying a certain number of stochastic operators to the previous population, such as selection, crossover and mutation. The genetic algorithm for centres and widths identification which is employed in this work is summarized as follows:
| Step 1: | Randomly generation of the population L = {L1,L2,... ....,Ln} where, n is the number of chromosomes |
| Step 2: | Evaluation of the fitness (Eq. 6) of each chromosome in current population and then create a new population by repeating following steps until the new population is complete |
| (6) |
| • | Selection of two parent chromosomes from a population according to their fitness (the better fitness, the bigger chance to be selected) |
| • | Crossing of the parents to form new offspring (children) with a crossover probability (Eq. 7). If no crossing was performed, offspring is the exact copy of parents |
 | (7) |
| • | Mutation of the new offspring at each locus (position in chromosome) with a mutation probability |
| • | Placing of the new offspring in the new population |
| Step 3: | Using of the new generated population for a further run of the algorithm |
| Step 4: | Stopping and returning of the best solution Lbest (Eq. 8) in the current population if the number of iterations is satisfied |
| (8) |
Going to step 2 if the maximum iterative step is not reached.
| Step 5: | Computing of the widths by the following heuristic rule: |
| (9) |
where, k is the number of hidden units in the RBF neural network.
In our approach, the segmentation is performed in two major steps. In the first phase, k-means algorithm and GA are used to determine centers and widths of basis functions. A comparative study is realized to choose the algorithm witch offer a good distribution of centers corresponding to input data. In the second phase, a supervised learning is performed to adjust weights between hidden layer and output layer (Fig. 2).
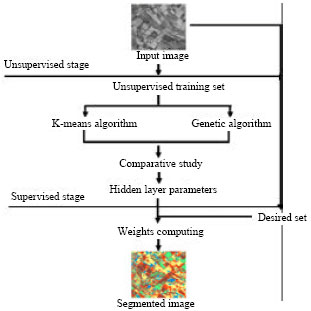 | |
| Fig. 2: | Flowchart of adopted approach |
RESULTS AND DISCUSSION
K-means vs. GA: Firstly and to determine the best algorithm to implementate with RBF, a comparative study has operated on an unsupervised training set with 2400 pixels. Figure 3 illustrates the localization of centers obtained by the k-means algorithm and GA algorithm. We can observe that the centers obtained by GA algorithm offer a better coverage of input distribution that the k-means ones. We note also that for the both algorithms the number of iterations was fixed at 600 iterations and 15 centers.
Experiments results: The proposed image segmentation approach was implemented using the programming language C++ on an Intel Core2Duo 3.0 GHz computer. The number of iterations for GA is 600, the number of neurons in hidden layer is equal to 15 and the number of neurons in output layer is 5. To demonstrate the effectiveness of the proposed approach, some experimental results are shown in this section. For the different experiments, we used an image obtained from QuickBird satellite sensor. This image depicts a region of Oran, Algeria and was taken on 08/04/2006 with 2.44 m pixel size and represented with 552 columns and 574 rows (Fig. 4a). Three experiments were conducted to demonstrate the pertinent data set witch give the best accuracy of image segmentation result. In the first experiment, the three bands were used. In the second experiment only green band was used (Fig. 4b). Finally, in experiment 3, the green band with texture feature was used.
At the end and in order to compare quantitatively between the three experiments, we have adopted the approach which consists to digitalize regions in input image and to calculate confusion matrix.
In the Fig. 5a and b, we present the segmentation results obtained by the first and second experiments respectively. The segmentation accuracy of the first experiment is less than the second one (58,50% against 67,45%) (Table 1). This results prove that the green band can distinguish clearly the 5 classes. In other hand, we constate that the integration of the bleu and infrared band are shown as noise.
The third experiment was conducted on the second band grey level with three texture feature derived from the gray-level coocurence matrix (GLCM). The texture measures used were entropy (MENT) (Eq. 10) in Fig. 6a, angular second moment (MASM) (Eq. 11) in Fig. 6b and dissimilarity (MDIS) (Eq. 12) in Fig. 6c.
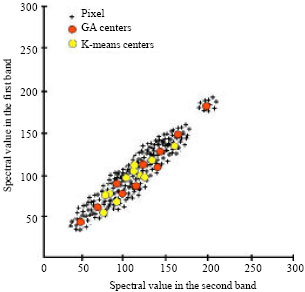 | |
| Fig. 3: | Localization of centers obtained by k-means and GA |
 | |
| Fig. 4: | (a) RGB Quickbird image and (b) Green band |
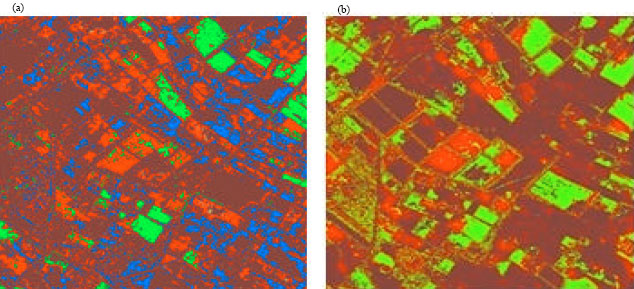 | |
| Fig. 5: | (a) Segmentation result obtained by RGB bands and (b) segmentation result obtained by Green band |
The statistics are computed for 3x3 pixel window and defined as follows:
| (10) |
| (11) |
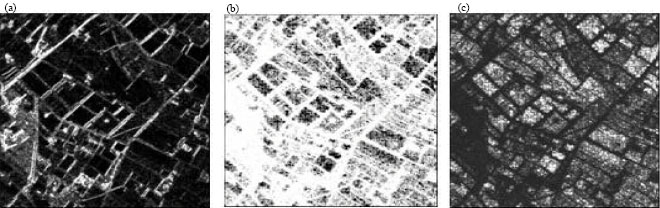 | |
| Fig. 6: | (a) Entropy image, (b) angular second moment image and (c) dissimilarity image |
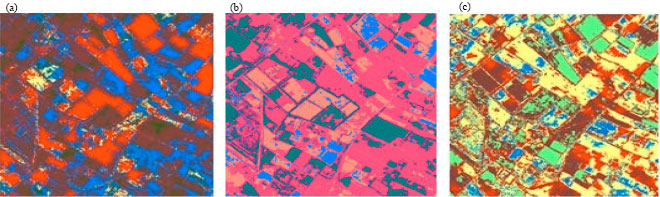 | |
| Fig. 7: | (a) Segmentation result obtained by grey level, MENT, MASM and MDIS, (b) segmentation result obtained by grey level, MENT and MASM and (c) segmentation result obtained by grey level and MENT |
| Table 1: | Segmentation accuracy for the different experiments |
 | |
| (12) |
where, Pi,j is the normalized gray-level value in the cell i,j of the matrix, N is the number of rows or columns.
In the Fig. 7, we present the third experiment results. It can be seen that when texture feature were included in the segmentation process the accuracy of image segmentation was always greater than that for RGB bands or green band alone. We note also that, the entropy and angular second moment offers a good result corresponding to real input image than dissimilarity and entropy.
Table 1 summarizes the results of accuracy segmentation according to the three experiments with 5 classes and 15 hidden neurons. These experiments show that entropy and second moment combined with grey level image increase the accuracy of segmentation than other combinations.
CONCLUSIONS
In this study, the Radial Basis Function Neural Network (RBFNN) with Genetic Algorithm was developed and tested successfully. The neural network was tested with QuickBird satellite image without and with textural feature.
From the previews experiments, we can draw the following conclusions:
| • | The RBF-GA is an appropriate approach in satellite imagery segmentation and performs better then RBF network using conventional k-means algorithm |
| • | The Neural Network and RBF-GA particularly, is advised when we use different data which following different distribution (Gaussian for optics data and Wishart for texture feature) |
| • | The three experiments examined in this study demonstrate that the texture features are important factors for a successful segmentation when it is combined with optics data if we choose an optimal one |
| • | The time processing for GA algorithm increase with the size of the input data |
According to the conclusions mentioned above, it is possible to conclude that texture features were particularly helpful for increasing the segmentation accuracy. Indeed, the use of these parameters as entropy and second moment have improved the precision of about 30% compared to the use of the spectral information alone.
The advantage of RBF-GA neural network over traditional segmentation algorithm is that is not a parametric model that does not need the normal distribution assumption in the input data.
Moreover, the GA has achieved an optimal configuration of the hidden units of RBF neural network.
However, time is only a drawback for the GA because it consumes much computer resources due to its stochastic operators.
In future work, many solutions can be considered, such as implementing Self Organizing Map (SOM) or Growing Neural Gas (GNG) to substitute GA. Future work may include also, the use of texture features obtained by Gabor filter and wavelength in a segmentation process.
REFERENCES
- Pal, N.R. and S.K. Pal, 1993. A review on image segmentation techniques. Pattern Recog., 9: 1277-1294.
CrossRefDirect Link - Jiang, X. and H. Bunke, 1999. Edge detection in range images based on scan line approximation. Comput. Vision Image Understand., 73: 183-199.
Direct Link - Mahi, H., D. Yousfi and T. Iftene, 2007. Classification multisource non dirigee a l`aide de l`algorithme growing neural gas ‹‹GNG››: Application a une image ETM+ de Landsat-7 de la region d'Oran en Algerie. Revue de Teledetection, 7: 485-497.
Direct Link - Venkatesan, P. and S. Anitha, 2006. Application of a radial basis function neural network for diagnosis of diabetes mellitus. Curr. Sci., 91: 1195-1199.
Direct Link - Zhang, G.Z. and D.S. Huang, 2004. Radial basis function neural network optimized by a genetic algorithm for soybean protein sequence residue spatial distance prediction. Evol. Comput., 1: 19-23.
CrossRef - Babu, I.S. and G.H. Rao, 2006. Optimization of culture medium for the production of poly-γ-glutamic acid using artificial neural networks and genetic algorithms. Res. J. Microbiol., 1: 520-526.
CrossRefDirect Link - Ozyilmaz, L., T. Yildirim and K. Koklu, 2002. Comparision of neural algorithms for funchtion approximation. J. Applied Sci., 2: 288-294.
CrossRefDirect Link