
Shanshan Peng
School of Electrical and Information Engineering, Hunan International Economics University, Changsha, China
Journal of Software Engineering
Year: 2015 | Volume: 9 | Issue: 3 | Page No.: 586-597







ABSTRACT
A golf training platform is presented based on mobile cloud computing in this study, this platform is used to make students avoid spending large sums of money to hire a trainer and buy high-end learning device and they just need some sensors, such as gravity sensors and gyroscopes, as well as a laptop or smart Bluetooth module phones, student body message and the golf club sensor data are received with the equipment, via 3G or Wi-Fi, these sensor information are connected to cloud system at any time for posture action alignment and correction.
PDF Abstract XML References Citation
Received: August 23, 2014;
Accepted: January 06, 2015;
Published: March 05, 2015
How to cite this article
Shanshan Peng, 2015. Cloud-Based Sport Training Platform Based on Body Sensor Network. Journal of Software Engineering, 9: 586-597.
DOI: 10.3923/jse.2015.586.597
URL: https://scialert.net/abstract/?doi=jse.2015.586.597
DOI: 10.3923/jse.2015.586.597
URL: https://scialert.net/abstract/?doi=jse.2015.586.597
INTRODUCTION
Wireless Sensor Network (WSN) is an intelligent system, environmental changes are monitored through the deployment of a large number of the sensing element (Cobo et al., 2010; Heinzelman et al., 2002; Kandris et al., 2011; Khalil and Attea, 2011; Shu et al., 2008). In recent years, WSN development is very rapid, sensor embedded technology has matured, wireless sensor device is ready to be wore to the body and it does not bring discomfort to the wearer (Sun et al., 2008; Yang et al., 2009; Huang et al., 2014).
WSN will be extend by Prof. Guang-Zhong Yang and Body Sensor Network (BSN) has been proposed, it is a new concept (Che and Sun, 2011; Omer and Mattem, 2004; Hanson et al., 2009). Somatosensory network is based on low-power wireless sensor networks and its real-time features, users only need to put some of the sensing element, the status of the wearer can be monitored remotely and at real-time (Peiris, 2013; Farella et al., 2006).
In this system, the coach motion video is recorded, sensor information of trainer’s standard action is simultaneously recorded, students can communicate via wireless devices, the continuous motion sensor information will be uploaded synchronously to the cloud computing equipment, motion trajectory is reconstructed and characteristics is compared and students' error actions are synchronously backhauled, which need to be corrected.
System diagram is as shown in Fig. 1. In Fig. 2, sensors are used to enhance the golf game. Figure 3 is 3D golf swing sensor. Golf glove with sensors is shown in Fig. 4.
METHODOLOGY
In the study system, key technologies include multiple motion sensors' initialization position and sensors’ synchronization, motion trajectory reconstruction, synchronization between shooting video and motion sensor information, similarity matching, etc., the following sections will be described in detail.
 | |
| Fig. 1: | System diagram |
 | |
| Fig. 2: | Use of sensors to enhance the golf game |
Multiple motion sensors’ initialization position and sensors’ synchronization technology: The position of multiple motion sensors is initialized and sensors are made to synchronization, these are described as follows:
| • | Body front is defined as the X-axis positive direction, the left is defined as the Y-axis positive direction, the top is defined as the Z-axis positive direction |
| • | Student’s height is told to the system through an input device, such as a keyboard, mouse |
| • | According to the height of the participants, each limb length is obtained in accordance with standard human limb proportions and then an initial position of each motion sensor is calculated in space |
| • | In addition, students can begin to use a braking method before the operation, such as buttons, sounds, gestures, the wireless communications are used to inform campaign learning systems, such as ZigBee, Bluetooth, etc., which start to read the value of the motion sensor |
| • | If the students wear the m gravity sensors and the sensor value is read at the beginning of the movement, the time of the initial Tick {t1, t2, ..., tm} is obtained for each of the sensors, the information of each motion sensor is recorded later, whose time is: |
 | |
| Fig. 3: | 3D golf swing sensor |
 | |
| Fig. 4: | Golf glove with sensors |
where, i = 1 ... m, s represents countdown of sample number per second.
Trajectory reconstruction technology: Some ball games, such as golf, tennis, etc., are opposed to hitting power, more important is to hit the ball steady and control the direction of the ball. In order to target that golf balls the final hole is reached at least swing frequency (Fan, 2012; Wu, 2003), stability of balling direction is very important, a perfect golf swing must be established, the chances of hitting success can be improved, as well as closer to the desired and reached position. Therefore, there is a tool to reflect trainees swing information. The inertial sensor is embedded in the shank of the club, thereby the physical information is crawled in the club moving process, a gravity sensor is used to obtain the accelerations of the club movement status, the status change of the club rotation angle is obtain by gyroscope.
Therefore, the three-axis gravity sensor of motion sensors (Triple-axis G-accelerometer sensor) and magnetometers can be used to provide acceleration, azimuth sensor information. Next, the Eq. 1 is used to do the integral of the sensor information. By the initial position of the reference motion sensor, each displacement amount of a motion sensor can be calculated in the X, Y, Z axial and the motion sensor location information is further calculated:
| (1) |
Furthermore, since the club is in the process of rotation and movement, the sensor itself has been in the coordinate transformation, the sensor value is not the same frame of reference, it will cause no relevance between the continuous values and axes need to be transformed to the same reference coordinate. Therefore, the angular velocity is obtained by sampling time which the gyroscope detects is multiplied by the angular variation and then the transformation matrix is obtained based on the angle change, the transformation matrix can be used and this movement status of the sensor is all converted into a coordinate system of the beginning swing and then integral is done, the displacement sensor information is calculated, the process is shown in Fig. 5.
Shooting motion video and motion sensor information synchronization technology: Students can be made to learn a more precise and detailed operation, the sensor information of the operation is embedded in the teaching video, it is based on the video frame rate and the sensor sample rate, so that there are the effect of time synchronization in the two recorded information.
 | |
| Fig. 5: | Trajectory reconstruction process |
At this point, the video and sensor information can be recorded separately in different files, such as AVI and XML file, or the sensor information is written to the field of video files. As an example, the sensor sampling rate can be adjusted into the video frame rate multiples, for instance, sensor sampling is 120 times per second and the video frame rate is for 60 fps. Start time of the video and sensor records should be Tick value or Timestamp value, which is converted to the same timeline, that is as shown in the Eq. 2:
| (2) |
Assuming the sensor information is obtained by sensor, Tick value (t0) of the first sensor information is 52642, Tick value (t2) of the second sensor information is 52646, a sampling rate is 120 Hz, the time recorded (TC) are 0 and 0.03 at this time. Similarly, assuming the first frame of the video Timestamp is 52646, Timestamp is 5238 for the second picture, the picture rate is 60 per second, then at the time, the recording time (TC) is 0 and 0.03, respectively.
Six golf swing key actions are defined, the steps include pull, turn, move, put, follow, close:
| • | Pull: It is early on pole, the palms are pulled back the position in front of the right thigh. Hand →arm→shoulder→hips. The club is drived as above order and right wrist rotates to positive front |
| • | Turn: It is late on pole, left shoulder rotates to the bottom of the chin and a substantial lever action is made. Arm is bent, it is up to the club parallel to the ground in the apex and the left wrist is fixed into angle of about 90 degrees |
| • | Shift: Early under the bar, right shoulder downs, right elbow is pulled to the bottom of right rib, people is into the “ready batting position”, the pole is put at the top of the belt. Hips start the next bar, to keep the wrist angle, to show the system’s “whip effect”, pre-order under the bar is hip→shoulder→arm |
| • | Place: Accelerated phase, wrists hit the ball after reaching the waist. At early the next shot, the wrist maintains angle and it does a full release |
| • | Follow and close: Late of front pars, that two actions is together into one which is as a pars action, that is from the hitting completion to the end of the entire pars action |
Sensor information is reused to determine the key action, it will output a corresponding table of video clip and the sensor information. In this correspondence table, it will be recorded what the key action takes place and when it happens at time point, which can be a separate electronic file, or the sensor information is written to the field of video files, it is as shown in Fig. 6.
Action similarity matching technology: In golf movement, whether the swing is good or bad, it has some appraisal criteria, such as time-paced action, pole head waving trajectory and club face position, clubhead speed and power:
| • | Time rhythm of actions: Swing rhythm must be played out before the strike, although swing is very short but it should also have a consistent rhythm, there are steady pitch and swing speed. A previous study also pointed out that there is still large differences between the novice and professional players at a time distribution of up and down the pole. In novice players swing time distribution, the share of time ranges from the 20-60% on the rod. Relatively speaking, the pole time distribution of professional players is very densely distributed in the vicinity of 70% |
| • | Pole head waving trajectory and the location of pole face: In the swing, the pole head should be maintained at a flat circle, such as a hula hoop. If the plane is departed during the swing, it means the club head will be on the plane sometimes, sometimes under the plane. This determination may be made by the main track, when all the swing data are converted to back to earth coordinates (Earth Frame) and the displacement of each information is calculated, the result can be in the same coordinate system, these are compared between the two swing, whether the inclination angle of the swing plane is the same |
| • | Clubhead speed and power: The accelerometer data is judged for the reference clubhead, due to the speed and power into a proportional relationship, as long as to calculate the acceleration of the head in each stage, it can be known whether the user’s strength is correct |
| • | Each body parts movements: The sensor data of various parts will be grouped, in the correct action, the collected reference clustering timeline is used to check whether the trainees motion sensor information falls in the correct grouping |
 | |
| Fig. 6: | Different video clips and sensor information corresponding method |
By using the trajectory characterization method which is described above, a standard coach three-dimensional motion trajectory parameters can be described as (ae, x, i, ae, y, i, ae, z, i) and the trajectory parameters of the participants is (al, x, i, al, y, i, al, z, i). An action similarity can be defined, Eq. 3 is shown below:
 | (3) |
After normalization of action similarity, it will be between 0 to 100%. Coach trajectory is assumed as {(0, -45, 130), (20, -45, 120), (40, -40, 100)} and the student trajectory is {(0, -40, 125), (15, -40, 120), (35, -35, 105)}, then their similarity is 88%.
RESULTS AND DISCUSSION
Application experiments: In the experimental section, it is discussed that the synchronous results of multi-motion sensors, track drawing, different body movements relative time on the timeline.
It is shown in Fig. 7, firstly, in the motion sensor synchronization experiment, the two motion sensors will be placed to overlap later, a short vibration is made to the sensors concurrently, since the waveform values of the two sensors should occur simultaneously and they end at the same time but it can be clearly seen from the former two figures that the start time of the sensor 1 is obviously segment gap with the start time of the sensor 2. After synchronization, the sensor axis 2 will be aligned to the sensor axis 1, it can be clearly seen from the third wave of the two sensors that they has been completely consistent.
By using trajectory reconstruction techniques, the student's swing path can be drawn, as is shown in Fig. 8, those are the two swing trajectory, students can self-check a single swing, whether the tracks of up and down the rod are on the same plane, they can compare once a swing path, so that students can correct their own actions error (Fig. 8).
Figure 9 is a relative time distribution of the different body movements, the ten data analysis are made, these are based on the above decomposition of the golf swing, they come from the pole and the lower lever sequence, the reasonable cluster analysis are made for the distribution of the sensor data.
 | |
| Fig. 7(a-c): | Multi-sensor synchronization experiments, (a) Sensor 1, (b) Sensor 2 and (c) Sensor 1 and 2 |
 | |
| Fig. 8: | Comparison of the two swings in the same plane |
 | |
| Fig. 9: | Different body movements relative time distribution map |
It can be clearly seen that on the initial action of the lever up and down, the action time of wrists and waist have a significant clustering phenomenon, it is coupled with the aforementioned golf action to resolve the order from the up rod and the lower rod, then the score is centered for the swing.
Golf auxiliary systems comparative analysis: In order to improve sports performance training, people have been looking for sports training and computer-aided design platform. Golf aided-teaching system was designed (Yang and Cheng, 2010) in the assisted teaching system, single-chip design was made to take golf ball collection and process parameters and the parameters was sent to the PC machine. The PC machine data, graphics and networking capabilities were used timely and visually to express hitting parameters and to manage these data for the user.
Motion capture golf swing analysis and assistant training system is proposed (Wang, 2014), in their design, through the use of virtual reality technology, the golf swing is captured by Camera Head and a database is established, by training and comparing the corresponding parameters, training method is given better for the coach. These computer-assisted exercise training systems are isolated and there is no real-time and interactive. Timeliness is poor.
In our system, Wi-Fi, Bluetooth or ZigBee are used in the communication system, Coach Database and Student Database are built, Tablet or smartphone are used in action correction (Fig. 1), sensors are used to enhance the golf game (Fig. 2), such as 3D golf swing sensor (Fig. 3), golf glove with sensors (Fig. 4), multi-sensors are used to analyze status, to get real-time feedback and 3D Golf swing analysis is carried out.
| Table 1: | Comparison of technical performance |
 | |
Application effects are seen in Fig. 7, 9. In above two systems and our design platform, comparison of these technical performance are in Table 1. Our designed system is a cloud-based golf training platform, its real-time is good, interactive is strong.
Video analysis is taken in golf aided-teaching system (Yang and Cheng, 2010) and motion capture golf swing analysis and assistant training system (Wang, 2014). Set-up is the first step of playing the golf. Also, it is one of the most important steps of the playing the golf. It impacts the golf ball’s directions and distances directly. This first step of the Set-up is to grip the club on the right way. For the starting position, the player should use his or her left hand to grip the club’s bottom side and warp his or her fingers around the bottom side of the handle. Then, to put the right hand on the left hand to hold the club and cover the left hand’s thumb. Compare with player picture, player griped club with my fingers and thumbs on the right way. The club was griped on the palms opposite in the neutral position. Also, player can see the same number of knuckles on the back of each hand. However, the 2 “V” is formed by thumb/index finger point, it is between back ear and back shoulder, it does not as good as griping the clubs. From the picture, player putted the 2 “V” a little bit forward. Player thumbs rest on the middle of the opposite sides.
Our system uses multi-sensor, real-time data collection, on-line analysis, timely feedback. As is shown in Fig. 7. For example, setting posture. When setting position, the knees should be slightly bent, there is lower center of gravity in order to maintain balance. When standing, spine, knee and foot is angled. From the rear, the rear foot should be slightly inside the buckle, toward the target. This will allow player on the rod, the chassis is the more stable while reducing excessive body movement. Hips is slightly upturned, the spine is the rotation axis of the swing, hip is a fulcrum. Therefore, the inclination angle of the upper body should be around 45 degrees. Let player club, hands and body as a coordinated. Middle vertebra of the spine should remain straight, if player spine is “lazy”, when the rod, the shoulder rotating potential will be affected. From the front, athlete spine is tilted backward, as is shown in Fig. 10. Hips and shoulders in target direction are slightly high than the other side, all of the pelvis should be moved to the target direction one to two inches. When athletes have errors, our system promptly notify the athletes correction.
Sports guidance system comparative analysis based on wireless sensor networks: Wireless Sensor Network (WSN) integrates the sensor network technology, information processing technology and network communication technology with the feature of small size, low cost and easy maintenance, which has a wide application in the area of environment data collection, security monitoring and target tracking.
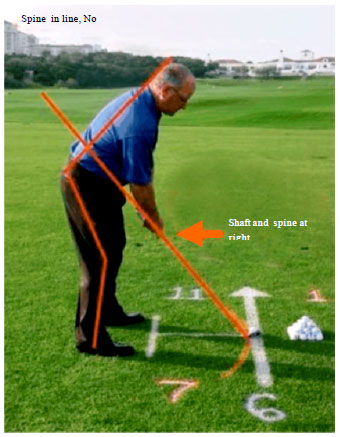 | |
| Fig. 10: | Standard posture in coach library |
Wireless Sensor Network (WSN) integrates the sensor network technology, information processing technology and network communication technology with the feature of small size, low cost and easy maintenance which has a wide application in the area of environment data collection, security monitoring and target tracking.
Wireless sensor network technology was used to design sports training system, which consisting of embedded data collection terminal and database servers (Cao et al., 2010). Sensor nodes and base stations were designed on hardware, motion parameters of athletes were real-time collected. Software nodes, base station control software and sports database management system were designed, to achieve the receiving, storing, analysis of the motion parameters. The advanced wireless sensor network technology (WSNS) was used to develop a “Student Physical Health Standard” test system (Lei and Xu, 2013), this system is used to solve the test data acquisition and transmission and reporting work and it can achieve seamless compatibility with physical education management systems, so that students’ health standards and daily classroom teaching, student management resource were made in sharing. In the analysis of the existing athletic distance measurement method, data was collected based on wireless sensor networks (Zhang and Yang, 2008), the real-time coordinates were located based on network nodes, the actual movement distance of the athletes were gotten and a new method of measuring the movement distance was obtained, so as it provides real scientific basis for physical training. In our study system, there are localization and tracking, time synchronization, routing protocols, topology control, network convergence, databases, platform. In addition to wireless sensor networks but also the multi-sensory sensors are used, data acquisition and storage are cloud distribution. Application effect is better.
CONCLUSION
A cloud-based golf training platform is designed in this study, if students can use this system, they can avoid spending large sums of money to hire a trainer and buy high-end learning equipment, college can be readily connected to the cloud system via 3G or Wi-Fi, perform postures are compared. In the experimental section, the system core and key technologies are discussed, including motion sensor position initialization and synchronization, track drawing and in order to verify the feasibility of technology, the relative time of different body movements have been researched on the timeline.
REFERENCES
- Cobo, L., A. Quintero and S. Pierre, 2010. Ant-based routing for wireless multimedia sensor networks using multiple QoS metrics. Comput. Networks, 54: 2991-3010.
CrossRefDirect Link - Farella, E., A. Pieracci, L. Benini and A. Acquaviva, 2006. A wireless body area sensor network for posture detection. Proceedings of the 11th IEEE Symposium on Computers and Communications, June 26-29, 2006, Italy, pp: 454-459.
CrossRef - Fan, X.D., 2012. Development of modern golf: From noble to civilians. Bull. Sport Sci. Technol., 18: 78-124.
Direct Link - Heinzelman, W.B., A.P. Chandrakasan and H. Balakrishnan, 2002. An application-specific protocol architecture for wireless microsensor networks. IEEE Trans. Wireless Commun., 1: 660-670.
CrossRefDirect Link - Kandris, D., M. Tsagkaropoulos, I. Politis, A. Tzes and S. Kotsopoulos, 2011. Energy efficient and perceived QoS aware video routing over wireless multimedia sensor networks. Ad Hoc Networks, 9: 591-607.
CrossRefDirect Link - Khalil, E.A. and B.A. Attea, 2011. Energy-aware evolutionary routing protocol for dynamic clustering of wireless sensor networks. Swarm Evol. Comput., 1: 195-203.
CrossRefDirect Link - Hanson, M.A., H.C. Powell, A.T. Barth, K. Ringgenberg, B.H. Calhoun, J.H. Aylor and J. Lach, 2009. Body area sensor networks: Challenges and opportunities. Computer, 42: 58-65.
CrossRefDirect Link - Omer, K. and F. Mattem, 2004. The design space of wireless sensor networks. IEEE Wireless Commun., 11: 54-61.
CrossRefDirect Link - Peiris, V., 2013. Highly integrated wireless sensing for body area network applications. SPIE.
CrossRefDirect Link - Shu, L., Y. Zhang, L.T. Yang, Y. Wang and M. Hauswirth, 2008. Geographic routing in wireless multimedia sensor networks. Proceedings of the 2nd International Conference on Future Generation Communication and Networking, December 13-15, 2008, Hainan Island, China, pp: 68-73.
CrossRefDirect Link - Sun, Y., H. Ma, L. Liu and Y. Zheng, 2008. ASAR: An ant-based service-aware routing algorithm for multimedia sensor networks. Front. Electr. Electron. Eng. China, 3: 25-33.
CrossRefDirect Link - Wang, J., 2014. Motion capture golf swing analysis and assistant training system design based on. Elect. Test, Vol. 1.
CrossRefDirect Link - Wu, Y.C., 2003. Motive and trend of social development of golf industrialization. J. Shanghai Phys. Educ. Inst., 27: 44-48.
Direct Link - Yang, J., W.L. Xiong and B.G. Xu, 2009. Routing algorithm based on ant colony algorithm in wireless sensor networks. Comput. Eng., 35: 4-6.
Direct Link - Huang, H.P., R.C. Wang and J.Q. Zhang, 2014. Research on cluster-based data aggregation for wireless multimedia sensor networks. J. Electron. Inform. Technol., 15: 8-14.
Direct Link - Cao, X.H., X.F. Zhou and Y.G. Qu, 2010. Athletic training system based on wireless sensor network. Comput. Syst. Applic., Vol. 2011.
Direct Link - Zhang, Z.Z. and C.X. Yang, 2008. Movement distance measurement method research based on wireless sensor network. J. Shaanxi Instit. Educ., 24: 114-117.
Direct Link