
Hongwei Ge
School of Internet of Things, Jiangnan University, Wuxi, Jiangsu, China
Wei Song
School of Internet of Things, Jiangnan University, Wuxi, Jiangsu, China
Information Technology Journal
Year: 2011 | Volume: 10 | Issue: 12 | Page No.: 2260-2267







ABSTRACT
Based on possibility concepts, various Possibilistic Linear Models (PLMs) have been proposed and their pivotal role in fuzzy modeling and the associated applications have been established. The Regularized Possibilistic Linear Model (RPLM) is a regularized version of PLM which can enhance the generalization capability of PLM. In present study, a novel Adaptive RPLMs Based Median Filter (ARBMF) is proposed for improving the performance of median-based filters, preserving image details while effectively suppressing impulsive noises. The proposed filter achieves its effect through the linear combinations of the weighted output of the median filter and the related weighted input signal and the weights are set based on regularized possibilistic linear models concerning the states of the input signal sequence. Experimental results for benchmark images demonstrate that the proposed filter outperforms a number of extensively-used median-based filters. Moreover, the proposed filter also provides excellent robustness with respect to various percentages of impulse noise in our testing examples.
PDF Abstract XML References Citation
Received: June 28, 2011;
Accepted: August 06, 2011;
Published: September 30, 2011
How to cite this article
Hongwei Ge and Wei Song, 2011. A Novel Adaptive Regularized Possibilistic Linear Models Based Median Filter ARBMF for Image Noise Suppression. Information Technology Journal, 10: 2260-2267.
DOI: 10.3923/itj.2011.2260.2267
URL: https://scialert.net/abstract/?doi=itj.2011.2260.2267
DOI: 10.3923/itj.2011.2260.2267
URL: https://scialert.net/abstract/?doi=itj.2011.2260.2267
INTRODUCTION
In the field of signal processing, the median filter is a well-known filter which demonstrates effectively in suppressing impulsive noises. However, the median filter also removes fine components of signals, causing distortion of signal waveform. Therefore, modifications to the median filter are needed and there are many studies about modification of the median filter. For example, the Weighted Median Filter (WMF) was given in Yin et al. (1996) and Lukac (2004) where the modification is to take the median value in a signal group in which some input signals are multiplied. However, setting the weights is difficult for actual signal processing. In Ko and Lee (1991) and Lin (2007), the Center Weighted Median Filter (CWMF) was introduced. In fact, it is a special case of the WMF that gives weight to only the central pixel in the filter window. Moreover, the Switching Median Filters (SMF) have been studied by Sun and Neuvo (1994) and Wang et al. (2010). These filters mainly use a detection process for separating the uncorrupted pixels from the corrupted. Therefore, pixels are left unchanged if they are judged as noise-free pixels. In addition, an extension of the Vector Median Filter (VMF) has been presented by Smolka and Chydzinski (2005) and Lukac et al. (2006) where there is an adaptively switching filtering design. The switching concept depends on a threshold and the detection process is based on the peer group concept and the statistical measure of the vector’s deviation. These switching median filters yield satisfactory results when the parameters concerned are properly set. However, it is not easy to exploit fixed decision-making parameters, since the parameters are obtained at a pre-assumed noise density level.
Since possibilistic linear regression analysis was first introduced the literature dealing with possibilistic regression analysis and Possibilistic Linear Model (PLM) has grown rapidly. Ge et al. (2008) investigated the Regularized Possibilistic Linear Model (RPLM) which is a regularized version of PLM and can enhance the generalization capability of PLM. In this study, we propose a novel Adaptive RPLMs Based Median Filter (ARBMF) to improve the median-based filters, especially for suppressing fixed- and random-valued noises while preserving image details. In this filter, the judgment of the existence of impulsive noises is expressed by RPLMs and the filter parameter is controlled by the models. Examples of processing actual images with impulsive noises are shown to verify the high performance of this filter. Moreover, the new filter also provides excellent robustness with respect to various percentages of impulse noise in our testing examples.
THE DESIGN OF THE FILTER ARBMF
The principle of the filter ARBMF: Suppose that impulsive noises are added to a two-dimensional image X with its height r and width c. Let x (i, j)ε{0, 1, 2,..., 255} be the pixel value at position (i, j) in image X. Let the observed sample matrix W (i, j) represents a filter window at location (i, j) with its size (2t+1)2, where t+1≤i≤r-t, t+1≤j≤c-t and the central pixel value of the window W (i, j) be x (i, j).
The output value y (i, j) of the filter ARBMF at the processed pixel x (i, j) is obtained as follows:
| (1) |
Here, β (i, j) denotes the weight indicating to what extent an impulsive noise is considered to be located at the pixel x (i, j). If β (i, j), an impulsive noise is considered to be located at the pixel x (i, j) and the output of ARBMF is equal to the median value of the input pixel values in filter window. If β (i, j) = 0, an impulsive noise is not located at x (i, j) and the output is equal to the input as it is.
To judge whether an impulsive noise exists or not, β (i, j) should take a continuous value from 0 to 1 to cope with ambiguous case. Therefore, the major concern of filter ARBMF is how to decide the value of β (i, j) at the pixel x (i, j).
The weight β (i, j) can be set by the local characteristics of the input signals. In general, the amplitudes of most impulsive noises are larger than the fine changes of signals. Hence, we can define the variable u (i, j) as follows (Arakawa, 1996):
| (2) |
where, u (i, j) denotes the absolute difference between x (i, j) and the median value m (i, j).
Obviously, if u (i, j) is large then an impulsive noise is assumed present, else {u (i, j)≈0} no impulsive noise is assumed present. The variable u (i, j) is a measure for detecting the possibility whether the input x (i, j) is contaminated or not (Wang, 1997). However, it is difficult to separate the impulsive noises sufficiently only by the value of u (i, j). For example, suppose that an image contains very fine components such as line components, the width of which is just one pixel and x (i, j) is located on the line with no impulsive noise. The value u (i, j) is large since m (i, j) must not be close to x (i, j) but to the background of this line and accordingly, an impulsive noise is assumed to be located at the pixel x (i, j), although no noise is there. To avoid the wrong judgment, it is necessary to add variable v (i, j) to improve the filter’s performance. The variable v (i, j) can be defined as follows (Arakawa, 1996):
| (3) |
where, x1 (i, j) and x2 (i, j) are selected to be the pixel values closest to that of x (i, j) in its adjacent pixels in the filter window. If v (i, j) is large then an impulsive noise is assumed present, else {v (i, j))≈0} no impulsive noise is assumed present.
The variable v (i, j) takes the isolation of impulsive noises into consideration so as to separate the impulsive noises from the fine components of signals. When a line component appears in the filter window, v (i, j) must be small since the two input signals selected in formula (3), that is, x1 (i, j) and x2 (i, j) must be located on the line, Thus, we can judge that no noise is located at the pixel x (i, j).
The partitioning of the observation vector space: In present study, according to the variables u (i, j) and v (i, j), the observation vectors are given by:
| (4) |
A partition is defined that the observation vector space Ω subset of R2 is classified into a set of N mutually exclusive blocks, defined as Ω1, Ω2,..., ΩN given by:
 | (5) |
where, the classifier f (.) is defined as a function of the observation vector O (i, j). It determines the output from a partition of the vector space Ω into N non-overlapping blocks according to the value of O (i, j), Thus, each input data x (i, j) corresponding to its O (i, j) is only classified into one of N blocks. In general, the classifier f (.) can be obtained by different methods to determine to which block the vector O (i, j) belongs. Owing to simple computation and efficiency, the Scalar Quantization (SQ) (Lin and Yu, 2004; Chen and Wu, 2001) is considered to be the classifier f (.) on the design of filter ARBMF.
In order to diminish the complexity, all the block boundaries on the partition Ω are restricted to be parallel to the coordinate axes and their projections on the coordinate axes are mutually exclusive or identical, Based on the special case, each block Ωk can be represented as a Cartesian product of two interval blocks, s1 and s2; that is, Ωk = s1xs2. Then each scalar component Oa (i, j)ε{u (i, j), v (i, j)}, a = 1, 2 of O (i, j) can be classified independently by using SQ (Lin and Yu, 2004) which is a very simple process whose quantizer consists of an encoder mapping process and a decoder mapping process (Sayood, 2000). The encoder mapping process includes receiving the input value Oa (i, j) and providing an output codeword which depends on the interval in which the valued falls and the decoder mapping process provides the codeword to a representative value d. In this study, encoder mapping process divides the range [0,255] into five intervals such that each scalar component Oa (i, j) belongs to one of the five intervals as shown in Fig. 1.
The following is the algorithm for the partitioning of the observation vector space.
| • | Input x (i, j) and the filter window w (i, j) centers around x (i, j) |
| • | Compute u (i, j) and v (i, j) by using Eq. 2 and 3, respectively |
| • | Obtain O (i, j) by using Eq. 4 |
| • | Decide which interval u (i, j) belongs to and provide a representative value d1 |
| • | Decide which interval v (i, j) belongs to and provide a representative value d2 |
| • | Evaluate O (i, j) that belongs to block k of the partition such that O (i, j)εΩk, kε {1, 2,..., N} by using the equation k = (d1-1)xB+d2, B, denotes the number of intervals of u (i, j) and v (i, j) |
 | |
| Fig. 1(a-b): | The quantizer input-output map for scalar observation vectors |
Figure 1 shows that the range [0,255] is divided into five intervals. Of course other possibilities may also exit. In present study, the quantization interval values are obtained empirically through extensive experiments and remain fixed in filtering process throughout all the experiments. That is, they are part of the filter ARBMF and can be applied to all situations. Despite its simplicity and low computational complexity using the SQ classifier, the filter ARBMF has shown desirable robustness in dealing with a variety of images corrupted by different impulsive noises.
The creation of regularized possibilistic linear models: In general, a possibilistic linear model can be written as:
| (6) |
where, ![]() denotes a symmetric triangular fuzzy number, i.e.,
denotes a symmetric triangular fuzzy number, i.e., ![]() , whose membership function is defined as:
, whose membership function is defined as:
 | (7) |
where, ξi is a center and ηi is a radius.
By fuzzy number arithmetic, we have
Thus, let:
Then:
| (8) |
Now, we can derive the acceptable fuzzy membership function μY (y) of output y as:
 | (9) |
We can easily establish a regularized possibilistic linear model for each block, according to the partitioning of the observation vector space.
 | |
| Fig. 2: | The original reference image ‘parlor’ |
The input/output data set for the creation of regularized possibilistic linear models can be obtained from a reference image. Figure 2 shows the original reference image ‘parlor’ used in out experiments. In our experiments, the reference image corrupted by 20% random-valued impulsive noise. According to the original image, the reference image and the formula (1), we can obtain the input/output data set. In this data set, the input variable is the observation vector and the output variable is the desired weight for the pixel. The data set D can be described as:
| (10) |
Another representation is also possible. If we take the observation vector u and v as the input variables, written as x1 and x2, respectively and take weight β as the output variables, written as y, The data set D can also be defined as:
| (11) |
where,
According to the partitioning of the observation vector space, the data set D can be divided into N data subsets which are corresponding to those observation vector subspaces, defined as D1, D2,..., DN given by:
 | (12) |
Assume we have obtained the data subset Dk (k = 1, 2,..., N), then we can establish the RPLM for the block Ωk (k = 1, 2,..., N), defined as Mk given by:
| (13) |
where,
 |
and ![]() denote the estimates of
denote the estimates of ![]() respectively.
respectively.
In RPLM, we need to choose an appropriate free parameter λ (i.e., the threshold value used to measure degree of fit), such that ![]() i.e. (Ge et al., 2008):
i.e. (Ge et al., 2008):
| (14) |
where, ηT |xi| denotes a radius of ![]() and ξT xi denotes the center of
and ξT xi denotes the center of ![]() . That is, the degree of fitting the estimated regularized possibilistic linear regression model
. That is, the degree of fitting the estimated regularized possibilistic linear regression model ![]() to the given output data is determined by the corresponding λ-level set. Then, the regularized possibilistic linear regression analysis in Eq. 13 will become the following optimization problem (Ge et al., 2008):
to the given output data is determined by the corresponding λ-level set. Then, the regularized possibilistic linear regression analysis in Eq. 13 will become the following optimization problem (Ge et al., 2008):
 | (15) |
where, c is a predefined constant, Δ― and Δ+ denote the latent variables of the upper/lower bounds of the output, respectively.
The RPLMs can be established after solving the optimization problems mentioned above. In our experiments, we let c = 80 and λ = 0.5. Although, we use reference image ‘parlor’ to establish RPLMs, our experimental results show that the performance of filter ARBMF is not dependent on the reference image. For example, the filtering results by the ‘parlor’ reference image are very close to the filtering results by ‘Lena’ or other reference images. For, in general speaking, even if we use other benchmark images as the reference images, the models established from our methods are steady.
It should be emphasized that after the RPLMs have been established, these models will be used in all our experiments and will never be changed again. In fact, these models have become the fixed parts of the filter ARBMF.
The operating procedure of filter ARBMF: Assume the filter window of ARBMF is sliding on the image X from left to right, top to bottom in a raster scan fashion. Now, we can express the operating procedure of the filter ARBMF as follows: the conventional median filter m (i, j) and observation vector O (i, j) are first computed and the k th block is detected for each input data x (i, j) by using the function f (O (i, j) and the value of β (i, j) associated with its block Ωk is obtained according to the regularized possibilistic linear model Mk. Of course, the corresponding output of Mk is a fuzzy number, we choose the center of the fuzzy number as the value of β (i, j). Finally, the output of filter ARBMF can be obtained by using Eq. 1.
The operating procedure can also be described in detail as follows:
 |
EXPERIMENTAL RESULTS
Several experiments for benchmark images are organized to demonstrate how well the proposed filter ARBMF can suppress impulsive noises and enhance the image restoration performance for signal processing. In order to evaluate and compare the performance of the proposed filter ARBMF with a number of existing impulse removal techniques which are variances of the standard median filter in the literature, we adopt the peak signal-to-noise ratio PSNR criterion to measure the image restoration performance and the noise suppression capability.
In addition, 3x3 filter windows were used in all the experiments. In particular, the quantization interval values employed in the partitioning processed were obtained experimentally and the satisfactory interval values shown in Fig. 2 are used throughout the experiments. The five intervals can be [0,5), [5,20), [20,35), [35,60), [60,255) and [0,2), [2,5), [5,15), [15,35), [35,255) for the variables u (i, j) and v (i, j), respectively. In the experiments, the image ‘parlor’ corrupted by 20% impulsive noise as shown in Fig. 2 was taken as the reference image. The RPLMs for the corresponding blocks can stay constant during the filtering stage throughout the experiments.
The first experiment is to compare the filter ARBMF with the standard median filter MEDF, the Center Weighted Median Filter (CWMF), the Switching Median Filter (SMF) (Sun and Neuvo, 1994) and the Vector Sigma Median Filter (VSMF) (Lukac et al., 2006) which was proposed in terms of noise removal capability. Table 1 serves to compare the PSNR results of removing both the fixed- and random-valued impulsive noise with p = 20% and it reveals that the filter ARBMF achieves significant improvement on the other filters for suppressing both types of impulsive noises.
In order to show the excellent capability for preserving image details while effectively suppressing impulse noise, Fig. 3, 4 are given here. These figures are the comparative restoration results of the several filters mentioned above for the benchmark images corrupted by random-valued impulsive noise at 20%. In our experiments, the filter VSMF seems to always outperform MEDF, CWMF and SMF, so the filter ARBMF is just compared with VSMF. Apparently, the filter ARBMF produced a better subjective visual quality restored image with more noise suppression and detail preservation. Especially, in Fig. 4, we can see that the ARBMF has preserved the top thin line more completely than the VSMF.
The second experiment is to demonstrate the robustness of the weights obtained from RPLMs with different percentages of impulsive noises, regardless of what is used as the reference image. In this experiment, the image ‘parlor’ corrupted by 20% impulsive noise is also taken as the reference image, independent of the actual corruption percentage.
 | |
| Fig. 3(a-d): | Restoration performance comparison. (a) original image, (b) the image degraded by 20% random-valued impulsive noise, (c) the restoration result of VSMF and (d) the restoration result of ARBMF |
 | |
| Fig. 4(a-d): | Restoration performance comparison. (a) original image, (b) the image degraded by 20% random-valued impulsive noise, (c) the restoration result of VSMF and (d) the restoration result of ARBMF |
| Table 1: | Comparative restoration results in PSRN (dB) for 20% impulsive noise |
 | |
| (a): Fixed-valued and (b): Random-valued impulsive noise | |
Figure 5 shows the comparative PSNR results of the restored image ‘boats’ when corrupted by the fixed- and random- valued impulsive noise of 5-30%, respectively. From Fig. 5, the filter ARBMF has exhibited a satisfactory performance in robustness, regardless of the reference image used in experiments. In addition, Fig. 6 shows the restoration performance comparisons of different methods in filtering the image corrupted by random-valued impulsive noises at various noise ratios. From these figures, we can also see that the filter ARBMF produced better subjective visual quality restored images.
 | |
| Fig. 5(a-b): | Restoration performance comparison of different methods in filtering the ‘Boat’ image corrupted by impulsive noises at various noise ratios. (a) image corrupted by fixed-valued impulsive noises, (b) image corrupted by random-valued impulsive noises |
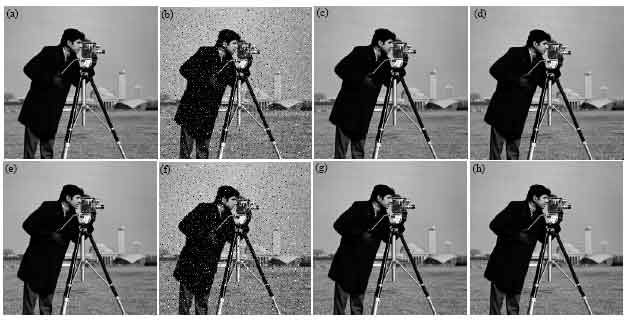 | |
| Fig. 6(a-h): | Restoration performance comparison of different methods in filtering the image corrupted by random-valued impulsive noises at various noise ratios. (a-b) original image, (c) noised image (p = 15%), (d) noised image (p = 25%), (e-f) the restoration results of VSMF and (g-h) the restoration results of ARBMF |
CONCLUSIONS
In present study, a novel adaptive RPLMs based median-type filter ARBMF has been proposed to preserve image details while effectively suppressing impulsive noises. The proposed filter achieves its effect through a summation of the input signal and the output of median filter. With the filtering framework, the efficient SQ method is used to partition the observation vector space and the observation vector is classified as one of N mutually exclusive blocks, then the weight associated with the corresponding block is obtained according to the RPLM. Some results of image denoising show the high performance of this filter and the filter ARBMF is not only capable of showing desirable robustness in suppressing noise but also able to gain appreciated image quality.
ACKNOWLEDGMENTS
This study is supported by National Natural Science Foundation of China (Grant No.60975027), New century Outstanding Young Scholar Grant of Ministry of Education of China.
REFERENCES
- Yin, L., R. Yang, M. Gabbouj and Y. Neuvo, 1996. Weighted median filters: A tutorial. IEEE Trans. Circuits Syst. II: Analog Digital Signal Process., 43: 157-192.
CrossRef - Lukac, R., 2004. Performance boundaries of optimal weighted median filters. Int. J. Image Graphics, 4: 157-182.
CrossRef - Ko, S.J. and Y.H. Lee, 1991. Center weighted median filters and their applications to image enhancement. IEEE Trans. Circ. Syst., 38: 984-993.
CrossRef - Lin, T.C., 2007. A new adaptive center weighted median filter for suppressing impulsive noise in images. Inform. Sci., 177: 1073-1087.
CrossRef - Sun, T. and Y. Neuvo, 1994. Detail-preserving median based filters in image processing. Pattern Recogn. Lett., 15: 341-347.
CrossRef - Wang, G., D. Li, W. Pan and Z. Zang, 2010. Modified switching median filter for impulse noise removal. Signal Process., 90: 3213-3218.
CrossRef - Smolka, B. and A. Chydzinski, 2005. Fast detection and impulsive noise removal in color images. Real-Time Imaging, 11: 389-402.
CrossRef - Lukac, R., B. Smolka, K.N. Plataniotis, A.N. Venetsanopoulos, 2006. Vector sigma filters for noise detection and removal in color images. J. Visual Commun. Image Represent., 17: 1-26.
CrossRef - Ge, H., F.L. Chung and S. Wang, 2008. Theoretical choice of the optimal threshold for possibilistic linear model with noisy input. IEEE Trans. Fuzzy Syst., 16: 1027-1037.
CrossRef - Arakawa, K., 1996. Median filters based on fuzzy rules and its application to image restoration. Fuzzy Sets Syst., 77: 3-13.
CrossRef - Lin, T.C. and P.T. Yu, 2004. Partition fuzzy median filter based on fuzzy rules for image restoration. Fuzzy Sets Syst., 147: 75-97.
CrossRef - Chen, T. and H.R. Wu, 2001. Application of partition-based median type filters for suppressing noise in images. IEEE Trans. Image Process, 6: 829-836.
CrossRef