
S.K. Tiong
Center of System and Machine Intelligence, Universiti Tenaga Nasional (UNITEN), Kajang-Puchong Road, 43009 Kajang, Selangor Darul Ehsan, Malaysia
David F.W. Yap
Faculty of Electronics and Computer Engineering, Universiti Teknikal Malaysia Melaka, Hang Tuah Jaya, 76109 Durian Tunggal, Melaka, Malaysia
S.P. Koh
Center of System and Machine Intelligence, Universiti Tenaga Nasional (UNITEN), Kajang-Puchong Road, 43009 Kajang, Selangor Darul Ehsan, Malaysia
Trends in Applied Sciences Research
Year: 2012 | Volume: 7 | Issue: 9 | Page No.: 785-791







ABSTRACT
This study proposes a novel method of introducing chaotic induced genes into Genetic Algorithms (GA) in order to solve unimodal and multimodal mathematical test functions. The integration of chaotic elements based on logistic map into GA has significantly improved the accuracy in the aspect of the best fitness value. Simulation results show that the influence of Chaos theory does improve the optimization accuracy of the mathematical functions used.
PDF Abstract XML References Citation
Received: May 11, 2012;
Accepted: August 11, 2012;
Published: October 10, 2012
How to cite this article
S.K. Tiong, David F.W. Yap and S.P. Koh, 2012. A Comparative Analysis of Various Chaotic Genetic Algorithms for Multimodal Function Optimization. Trends in Applied Sciences Research, 7: 785-791.
URL: https://scialert.net/abstract/?doi=tasr.2012.785.791
URL: https://scialert.net/abstract/?doi=tasr.2012.785.791
INTRODUCTION
Genetic Algorithms (GA) was first suggested by John Holland in early 1970s. While conventional algorithms are derived from higher-order statistics or from a gradient of a singular measurement function, GA is a random search algorithm motivated by nature (Goldberg, 1989; De Castro and Zuben, 2002; Chen et al., 2001). Sustaining its role as a global optimization technique, GA uses a coding scheme to act on numeric string represented by either binaries or decimals. The main strength of the evolutionary process for GA is the crossover and the mutation operator. While GA provides an efficient search method and has been used in many practical instances of optimization and decision-making problems, it tends to converge prematurely (Goldberg, 1989).
Chaos is a general phenomenon that occurs in nonlinear dynamic systems with numerous applications especially in the field of engineering and physics. Minute differences in initial conditions would cause widely diverging/divergent results for chaotic systems, so continuous predictions are impractical (Kellert, 1993). Chaotic behaviour can be seen in many natural systems such as global weather patterns (Gleick, 1988) and healthy heart rhythms (Goldberger et al., 1990).
Thus, in order to enhance the performance of GA, an array of chaotic genes is injected into the GA and this method is expected to improve the accuracy of the fitness value. The functions to be used for comparing optimization results include Rastrigin’s, De Jong’s first, Rosenbrock’s and Griewangk’s function.
CHAOTIC MAPS AND GENETIC ALGORITHM
Chaotic maps: Using chaotic sequences instead of randomized number generators appears to be able to improve the performance of conventional heuristic algorithms. While the initial population or genes are well-spread out by using chaotic maps, randomized genes are normally generated using Gaussian or Normal distribution.
| Table 1: | Common chaotic maps |
 | |
The commonly used chaotic maps are presented in Table 1. All of the chaotic maps listed in Table 1 are in real space domain. Logistic, Cubic and Ricker’s (Chen and Huang, 2011) are one-dimensional maps while Hénon and Ikeda (Driebe, 1999) are in two dimensional space. The Lorenz map is a three-dimensional map and is in the continuous time domain. The rest of the chaotic maps are parameterized by a discrete-time domain.
Genetic algorithm: GA is a search technique that has a representation of the problem states (by using a set of chromosomes) and also has a set of operations to move through the search space. Each chromosome represents an individual solution (gene) to the problem. The set of individual solutions or genes forms a population. Genes in the population improve generation by generation through a set of operation that GA uses during the search process. During each generation, genes will go through the process of selection, crossover and mutation (Emmeche, 1994).
In selection, an objective function (fitness function) is used to assess the quality of the solution. The fittest solutions from each generation are kept. The crossover function generates new solutions given a set of selected members of the current population. Crossover exchanges genetic material between two single chromosome parents. Lastly, mutation would cause a sudden change in chromosomes in an unanticipated manner. As such, some values of a chromosome are altered by adding random values to the current values, therefore producing a different solution. The mutation operation is a smart technique to escape from local optimal trap in which state-space search algorithms may fall into.
Genetic algorithm with chaotic genes: The operation of a standard GA with initial chaotic genes can be represented in pseudo-code format in Fig. 1, while the summary is as follows (Goldberg, 1989):
| Step 1: | Generate an initial population of individuals using predefined chaotic map |
| Step 2: | Calculate the fitness values of the individuals in the current population |
| Step 3: | Select individuals for reproduction |
| Step 4: | Apply crossover and mutation operator |
| Step 5: | Compute the fitness values of the individuals |
| Step 6: | Select the best individuals to create the new population |
| Step 7: | Steps 3 to 6 are repeated until a pre-defined stopping criterion is attained |
 | |
| Fig. 1: | Pseudo-code of the standard GA |
In the present work, the classical GA is used with binary codification, scattered crossover, one individual elitism and stochastic uniform selection while the chaotic maps injected are based on Table 1.
MATHEMATICAL TEST FUNCTIONS
In order to compare the performance of a normal GA with injected chaotic genes, four mathematical test functions would be used (Suganthan et al., 2005). These test functions provide a benchmarking method in testing the efficiency of the global optimization algorithms. For the next subsections, the details of each test function used in this study would be discussed.
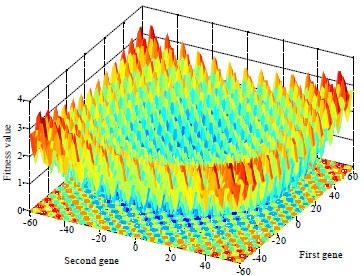
Rastrigin’s function: Rastrigin’s function is mathematically defined as:
| (1) |
The global minimum is located at the origin and its function value is zero. Rastrigin’s function of dimension 2 is shown in Fig. 2.
De Jong’s first function: De Jong’s first function is mathematically defined as:
| (2) |
The global minimum is located at the origin and its function value is zero. De Jong’s first function of dimension 2 is shown in Fig. 3.
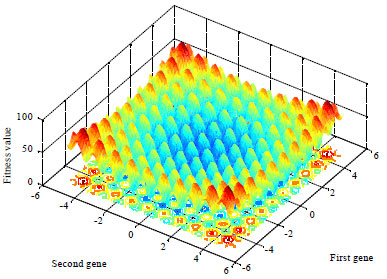 | |
| Fig. 2: | A two-dimensional plot of Rastrigin’s function |
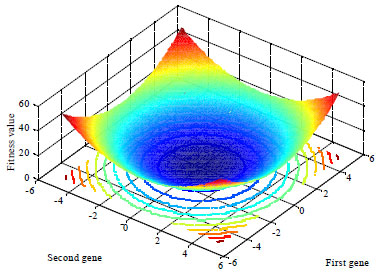 | |
| Fig. 3: | A two-dimensional plot of De Jong’s first function |
De Jong’s second function (also known as Rosenbrock’s Function): De Jong’s second function is mathematically defined as:
| (3) |
The global minimum is located at (1, …, 1) and its function value is zero. De Jong’s second function of dimension 2 is shown in Fig. 4.
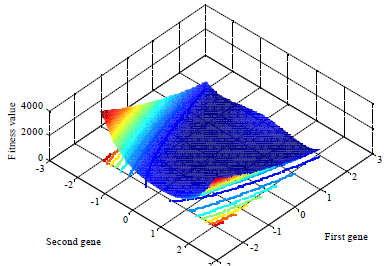
Griewangk’s function: Griewangk’s function is mathematically defined as:
| (4) |
 | |
| Fig. 4: | A two-dimensional plot of De Jong’s second function |
 | |
| Fig. 5: | A two-dimensional plot of Griewangk’s function |
The global minimum is located at the origin and its function value is zero. Griewangk’s function of dimension 2 is shown in Fig. 5.
Simulation results and discussions: The comparison in simulation performance between GA and the injected chaotic genes was carried out by using a computer with AMD Phenom 9600B Quad-Core CPU running at 2.30 GHz, 2 GB of RAM and Windows Vista operating system. For the normal GA, the scattered crossover, the Gaussian mutation and the stochastic uniform selection operators are used. The value of crossover rate and mutation rate was set at 0.8 and 0.01, respectively. For the GA with injected chaotic maps, the parameters of the chaotic maps used are shown in Table 1. The initial population size and number of iterations are fixed at 50 for all experiments. The simulation results are shown in Table 2 with different mathematical test function. A better accuracy is achieved for fitness values closer to zero Thus, Logistic, Hénon and Ikeda function performed better than the standard GA in all of the test functions used. Similarly, there is an improvement for Cubic function in comparison with the standard GA for De Jong 1 and De Jong 2 test function, respectively.
| Table 2: | Comparison of fitness value results using normal GA and injected chaotic maps |
 | |
The improvement in the accuracy of the fitness value is probably due to the randomness of the genes based on the chaotic map that covers a wide range of possible solutions, especially in the initialization stage of the GA. Overall, GA with Logistics chaotic map performed the best in all the four mathematical test functions with the lowest fitness value in the order of E-08.
A comparison with the classical particle swarm optimization, genetic algorithm and artificial immune system by other authors (Edge et al., 2006; Gu et al., 2009; Valdez and Melin, 2008; Vieira et al., 2009; Yap et al., 2009) shows that the chaotic GA proposed here is superior in terms of achieving the fitness value closest to zero. In addition, in Ma and Li (2009), Ru and Jianhua (2008), Sun et al. (2009), Yap et al. (2011a, b), the performance of chaotic GA is on par with other hybrid immune based algorithms with fitness values in the region of E-06 to E-08. With the increase in accuracy by injecting chaotic maps into normal GA; applications such as scheduling problems, daily rostering systems or other optimization problems would bear better and accurate results.
CONCLUSION
The simulation results of GA and chaotic maps was presented and compared. The usage of the multimodal test function shows that the GA and chaotic maps have comparable fitness value with differences in the order of thousands or less from the global minimum. From the results, Logistic, Hénon and Ikeda performed better than the standard GA in obtaining the lowest fitness value of the multimodal test functions. Future work may include improved or modified GA and chaotic map with other Particle Swarm Optimization or Artificial Immune System as a hybrid algorithm that will be used to optimize other complicated test function.
REFERENCES
- De Castro, L.N. and F.J. von Zuben, 2002. Learning and optimization using clonal selection principle. IEEE Trans. Evolutionary Comput., 6: 239-251.
Direct Link - Gleick, J., 1988. Chaos: Making a New Science. 1st Edn., Penguin Books, New York, ISBN-10: 0140092501, pp: 352.
Direct Link - Goldberger, A.L., R.R. David and J.W. Bruce, 1990. Chaos and fractals in human physiology. Sci. Am., 262: 42-49.
PubMed - Gu, J., L. Lin and H. Wang, 2009. A hybrid particle swarm optimization algorithm for multimodal function optimization. Proceedings of the International Workshop on Intelligent Systems and Applications, May 23-24, 2009, Wuhan, pp: 1-4.
CrossRef - Ma, J.H. and L. Li, 2009. Well logging automatic core relocation based of the immune particle swarm opimization algorithm. Proceedings of the International Conference on Computational Intelligence and Software Engineering, December 11-13, 2009, Wuhan, pp: 1-7.
CrossRef - Ru, N. and Y. Jianhua, 2008. A GA and particle swarm optimization based hybrid algorithm. Proceedings of the Congress on Evolutionary Computation, June 1-6, 2008, Hong Kong, pp: 1047-1050.
CrossRef - Sun, Y., W. Zhang and M. Zhang, 2009. Modified particle swarm optimization based on immune clone principle for analog-matching of equivalent system. Proceedings of International Conference on Automation and Logistics, August 5-7, 2009, Sheyang, China, pp: 1135-1138.
CrossRef - Valdez, F. and P. Melin, 2008. Comparative study of particle swarm optimization and genetic algorithms for complex mathematical functions. J. Automation Mobile Robotics Intell. Syst., 2: 43-51.
Direct Link - Vieira, I.N., A.J.M. Silva, B.S.L.P de Lima and B. Jacob, 2009. A comparative study applied to risers optimization using bio-inspired algorithms. Int. J. Model. Simulat. Petroleum Ind., 3: 5-12.
Direct Link - Yap, D.F.W., S.P. Koh and S.K. Tiong, 2009. A comparative analysis on the performance of particle swarm optimization and artificial immune systems for mathematical test functions. Aust. J. Basic Applied Sci., 3: 4344-4350.
Direct Link - Yap, D.F.W., S.P. Koh, S.K. Tiong and S.K. Prajindra, 2011. A swarm-based artificial immune system for solving multimodal functions. Applied Artificial Intelli., 25: 693-707.
CrossRefDirect Link - Yap, D.F.W., S.P. Koh, S.K. Tiong and S.K. Prajindra, 2011. Particle swarm based artificial immune system for multimodal function optimization and engineering application problem. Trends Applied Sci. Res., 6: 282-293.
CrossRefDirect Link