
Nuray Misir
Faculty of Forestry, Karadeniz Technical University, 61080 Trabzon, Turkey
Mehmet Misir
Faculty of Forestry, Karadeniz Technical University, 61080 Trabzon, Turkey
Pakistan Journal of Biological Sciences
Year: 2007 | Volume: 10 | Issue: 3 | Page No.: 514-522







ABSTRACT
In this study, multi-objective forest management planning process and application were realized in a case study involving faculty research forest. Forest values were quantitatively determined. Goal programming was used in developing multi objective forest management planning model. Forest function considered as forest management objectives (goals) in the model include wood production, soil protection and water production. Four different models containing different goals combinations were developed. Goals were prioritized differently in these models. The goals were fully achieved. Moreover, for the tree goals, the optimum GP solutions presented wanted deviations with respect to the initial target values. Forest function maps were prepared according to models solutions in the end of this study.
PDF Abstract XML References Citation
How to cite this article
Nuray Misir and Mehmet Misir, 2007. Developing a Multi-Objective Forest Planning Process with Goal Programming: A Case Study. Pakistan Journal of Biological Sciences, 10: 514-522.
DOI: 10.3923/pjbs.2007.514.522
URL: https://scialert.net/abstract/?doi=pjbs.2007.514.522
DOI: 10.3923/pjbs.2007.514.522
URL: https://scialert.net/abstract/?doi=pjbs.2007.514.522
INTRODUCTION
Forest ecosystems are enormously important to mankind. They not only supply wood, foods, medicines, waxes, oils, gums, resins and tannins, but they also regulate climate, hydrology, mineral cycling, soil erosion and cleansing of air and water. A variety of natural and human-induced environmental stresses have both beneficial and harmful effects on forest ecosystems. However, human-induced environmental stresses have led to decimation of forest ecosystems, loss of biodiversity, forest declines and potential global warming. Short-rotation plantations, especially in the tropics, are increasing rapidly, largely to produce wood quickly. Plantations also stabilize soil, prevent water runoff, provide shelter from the wind and heat and relieve pressure for exploiting natural forests.
The management of forest ecosystems is typically an area where conflicting objectives of a complex system present a challenging task for developing a management strategy that guarantees the long-term vitality of the ecosystem being utilized. The concept of ecosystem management that will be considered has a goal-to amend or maintain ecological sustainability of forest ecosystems subject to a continual production, without depletion, of periodic quantities of wood, non-wood products and services. The focus here is on state of ecosystem components such as biodiversity, forage, water, game, fish and wood that should be maintained in a healthy state through adaptive forest practices and management. Ecosystem management treats these components as being interrelated in an interactive system, rather than independent and isolated (Turner et al., 2002).
The complexity of forest management problem has dramatically increased in recent years because of the multiplicity of proposes and interests involved in this type decisional context. Nowadays, it is accepted that every decision taken in this field affects several criteria of very different in nature (e.g., economic, environmental and social). It is also accepted that the interests of society as a whole should be pursued in forest management (Diaz-Balteiro and Romero, 2001).
Forest managers are aware of the need to integrate forest planning problems within a multicriteria framework. Thus, up to now extensive applied literature addressing several forest management and planning problems with an multi criteria decision making perspective has arisen. Among these application, most widely used multi criteria decision making technique has been goal programming (GP) (Diaz-Balteiro and Romero, 1998).
GP is a modification of conventional linear programming. It differs from that more familiar technique primarily in perspective. A primal (as opposed to dual) linear programming model focuses on the problem of determining an optimal allocation of scarce resources to meet a given set of objectives. GP, in a similar format, seeks a plan that comes a close as possible to attaining specified goals. Both procedures deal with constrained optimization. Both are limited by the assumptions that model variables are infinitely divisible and connected only by linear relations. GP requires, further, the explicit specification of quantative goals and any preference structure that may be associated with those objectives. Therefore, the goal programming approach involves the decision makers in a process that attempts to achieve a satisfactory level of achievement for several objectives, rather than an optimal outcome for a single objective (as is done in linear programming). Essentially, the manager attempts to make a decision that results in solution that comes as close as possible to reaching all goals (Field, 1973).
The ultimate objective of forest management is to control forest ecosystems on the basis of sustainable use of multiple values without jeopardizing ecological integrity. In this study, multi-objective forest management planning process and application were realized in a case study. Forest functions including water production and soil protection were quantitatively determined. Forest functions were considered as forest management objectives in the models include wood production, soil protection and water supply. Data were collected from temporary and permanent sample plots. For study, various management options were tested. These include combinations of maximizing wood production while minimizing soil erosion and maximizing water supply. These three objectives were prioritized differently and the best results were obtained in four alternative models.
Throughout history the dominant function of forests has been to provide natural resource products. Forests were and are exploited for both timber and non-timber products everywhere; forest plantations also are primarily devoted to this purpose. Sustainability of exploitable biomass production depends on a set of criteria which determine the nutrient and energy budget and the balance of food chain interactions in the ecosystem (Andersson et al., 2000). Sustained economic productivity as a forest function implies human impact on the ecosystem. These impacts have special characteristics, which differ dependent on the utilized product (e.g., timber versus resin versus pasture) and the method of utilization (e.g., coppice versus high forest versus clear-cut). There must be a corresponding pattern of ecosystem characteristics that provides the capacity to withstand these impacts (Führer, 2000).
Forests are increasingly used by urban populations for recreational purposes. Frequent visits exert specific effects e.g., permanent behavioural disturbance of deer populations, compaction and pollution of soil, increased risk of forest fires etc. A forest directly devoted to recreational purposes must also be easily accessible and fulfil particular aesthetic criteria (Willis and Benson, 1989). In contrast to productive and protective forests, criteria determining visitor comfort and safety may take precedence over other management objectives.
Last but not least, forests represent the habitat of a considerable part of our flora and fauna, which must be sustained for the conservation of biodiversity (Boyd, 1987). Formerly managed forest areas are left to nature for the sake of protecting threatened plant and animal species. The characteristics and condition of the ecosystem determine what happens in natural forest reserves after the management regime has been abolished.
Apart from the defined forest functions above, human welfare benefits from the diverse environmental effects of forests (e.g., climate, landscape, hydrology, water and air quality, CO2 sequestration and aesthetics). These general environmental functions are also affected by several natural and anthropogenic loads. Their carrying capacity depends again on ecosystem features, determining the pattern of ecological responses and on the reserves of the system to buffer extrinsic influences (e.g., critical load of acid depositions) (Führer, 2000).
MATERIALS AND METHODS
Goal Programming (GP) can be based on different philosophies. Ignizio (1976) was the first to interpret and to formulate GP models with in a Simonian “Asatisficing” philosophy. From an analytical point of view, a satisficing philosophy with in a GP context implies that decision-makers (DM) are interested only in minimizing the non-achievement of several goals. Let us assume that the unwanted deviation variables for a given problem are as fallows: n1, p2,..., (ni+pi),..., nq.
That is, goal g1 is of the first type (f1(x) = t1), goal g2 of the second type (f2(x) = t2),..., goal gi of the third type (fi(x) = ti), etc. The formulation of a GP model implies the minimization of a function of the former unwanted deviation variables:
The minimization process can be accomplished with different methods, each one leads to a different GP variant. Basically, there are only three GP variants reported in the literature. The most widely used is Lexicographic Goal Programming (LGP) (Non-Archimedean Goal Programming), which attaches pre-emtive priorities to different goals in order to minimize the unwanted deviation variables in a lexicographic order. The second one is Weighted Goal Programming (WGP) (Archimedean Goal Programming), which attempts to minimize a composite objective function formed by a weighted sum of unwanted deviation variables. The third is MINMAX (Chebyshev) (Fuzzy) Goal Programming, which attempts to minimize the maximum deviation from the stated goals (Tamiz et al., 1998).
The achievement function for a LGP (Non-Archimedean Goal Programming) model consists of two or more terms. As in the case of the Archimedean form, the first term always contains the unwanted deviation variables for all the hard goals. After that, the deviation variables for all soft goals are arranged according to priority-more specifically, a nonpreemtive priority. To demonstrate, consider the problem previously posed as WGP. Assume that we are unable, or unwilling, to assign weights to profit or market share goals. But we are convinced that the capture of market share is essential to survival of the firm. It might then make sense to assign a higher priority to market share than to profit, resulting in the LGP achievement function given here:
| (1) |
While the achievement function of (Eq. 1) consist of but a single deviation variable for the second and third terms, the reader should understand that several deviation variables may appear in a given-if you are able to weight each according to its perceived importance (Ignizio and Romero, 2003).
Model formulation: In this case, following criteria can be considered relevant for strategic forest management purposes: (a) the maximization of the wood production of the study area over the planning horizon; (b) the maximization of water production (c) the minimization of total the soil loss of the study area (d) the equality of harvest volume in each cutting period (±20%). The area control criterion that looks for ending even-aged forest were not considered in this study.
Constraints and goals: The following constraints and goals were considered in the models:
Constraints
| (2) |
Block of constraints (Eq. 2) secure that the sum of the hectares attached to each stand has to be equal to the area corresponding to each stand.
Goals
• | (3) |
The target goals (Eq. 3) Hk has been obtained by maximizing wood production subject to area accounting constraints (Eq. 1).
Therefore, Hk is an anchor value and consequently the negative deviation variable nH is unwanted and its minimization implies the maximization of wood production.
• | (4) |
| (5) |
Equation 4 estimate the water production of each stand. Explanation of how to calculate to water production, following methodology proposed by Msr (2001) will be presented in the next section. Finally, the target for total wood production WP is obtained by maximizing subject to area accounting constraints given by Eq. 1.
 |
Therefore, Wk is an anchor value and consequently the minimization of the negative deviation variable nWP implies the maximization of total water production along the planning horizon T.
• | (6) |
| (7) |
Equation 6 estimates the soil loss of each stand. To calculate soil losses, methodology proposed by Msr (2001) was followed. Finally, the target for total soil loss Sk is obtained by minimizing.
![]()
Therefore, Sk is an anchor value and consequently the positive deviation variable pSL is unwanted and its minimization implies the minimization of total soil loss along the planning horizon T.
• | (8) |
The volume control equation imposes a strict even flow of timber volume harvested each of the J cutting periods considered.
The models: In order to obtain a satisficing solution the following list of unwanted deviation variables defined above should be minimized:
 |
These goals were prioritized differently and the best results were obtained in four alternative models in this study. For example, the first goal that must be satisfied is wood production in model 1. The next priority in order of importance is made up the goal volume control. The models and goals priorities are listed in Table 1.
| Table 1: | Models and priority of goals |
 | |
The amount of commercial thinning in areas primarily allocated for soil protection was half of the amount projected for the areas allocated for wood production. The rate in areas for water production, however, was twice the level of commercial thinning in wood production areas.
Delphi object oriented programming language were used in solving developed multi objective forest management planning model.
The case study
Study area: This study was conducted in Research Forest of Karadeniz Technical University Faculty of Forestry. The research forest is in Blacksea Region in Trabzon, Turkey. The study area is 218.8 ha. Altitude of this area range from 400 to 1250 m above the sea level and average slope is about 51%. 196.3 ha of the study area is productive high forest, 1.8 ha of that is unproductive high forest and 20.7 ha is unproductive coppice (Msr, 2001). The main characteristics of stands in this area are shown in Table 2.
Increment percentages simulation method proposed by Eraslan (1981) was used in order to form wood production (Table 3) and basal area (Table 4) matrixes of each stand in study area.
Data were collected a total of 132 sample plots in order to calculate amounts of soil loss and water production of the stands. For each plots, all trees were measured for diameter at breast height, total height and age.
While amounts of soil loss of each sample plots were calculated using USLE (Universal Soil Loss Equation), these of water production were obtained by Altun (1995).
In determining relationship between amounts of soil loss and water production and stand characteristics were used Regression Analysis. These relationships were as follows:
| (8) |
| (9) |
Where SL is soil loss (ton ha-1), WP is water production (ton ha-1) and BA is stand basal area (m2 ha-1). By using BA matrixes (Table 4) and Eq. 8 and Eq. 9 were calculated soil loss (Table 5) and water production matrixes (Table 6).
For example;
 |
Goal functions of soil loss and water production were obtained using these matrixes. For example:
| ......... |
Where WP is water production of each stand and W is total water production in each cutting period.The target values for the goals wood production, water production and soil protection were determined according to the actual values.
| Table 2: | Stand definition table of study area |
 | |
| Table 3: | Wood production matrix (Stand Yield Matrix) (m3 ha-1) |
 | |
| Table 4: | An example for stand basal area matrix (m2 ha-1) |
 | |
| Table 5: | An example for soil loss matrix (ton ha-1) |
 | |
| Table 6: | An example for water production matrix (ton ha-1) |
 | |
RESULTS
In order to best-compromise harvest schedules, the lexicographic GP models were implemented. Area distribution obtained from models solutions were given in Table 7.
209.2 ha of total study area were allocated for wood production, 1.3 ha for soil protection and remaining 8.3 ha for water production in Model 1. The first priority goal was the maximizing of wood production in this model. The minimizing of soil loss and maximizing of water production goals were not considered in model 1. In model 2, the minimizing of soil loss placed in the first priority level, 25.2 ha were allocated for soil protection, 9.8 ha for water production and 183.8 ha for wood production. This area distribution is a, 5.1 and 196.2 ha, respectively in model 4. Although the maximizing of water production was the first priority goal in model 3, no area was allocated for water production in the solution of this model.
Area distribution of age classes obtained from models solutions was given Fig. 1 and other results were listed in Table 8.
From the analysis of information contained in Table 8, the following conclusions are obtained:
 | |
| Fig. 1: | Area distribution of age classes according to models solutions |
| • | The goal of the wood production placed in the first two priority levels are fully achieved in Model 1, 2 and 4. However, the highest wood production was obtained in Model 4 contains all goals. Although the maximizing of wood production placed in second priority level in Model 4, the maximizing of water production third priority level caused increasing amount of wood production. Amounts of wood production aimed (T) and obtained (O) were given in Fig. 2 |
| Table 7: | Area distribution of forest management goals according to models solution (ha) |
 | |
| Table 8: | Results of GP models |
 | |
 | |
| Fig. 2: | Amounts of wood productions aimed and obtained (m3) |
 | |
| Fig. 3: | Soil loss amounts of models according to cutting period |
| • | The least amount of soil loss was obtained in model 3 along the planning horizon (100 years). The goal of the soil protection placed in first priority in this model and for this reason, 130.6 ha of study area were allocated for soil protection. The highest value was obtained in model 1 that not contain the minimizing of soil loss. The amounts of soil loss were shown in Fig. 3. |
| • | Maximizing of water production only placed in model 3 and model 4. The highest amount of water production was obtained in model 4 though maximizing of water production was the third priority level. The highest amount of wood production was also obtained in model 4. For this reason, It was proved that the relation between wood production and water production is linear. The amounts of water production were shown in Fig. 4. |
 | |
| Fig. 4: | Water production amounts of models according to cutting period |
| Table 9: | Stands codes for preparing forest function map |
 | |
The function or functions which stands in research area fulfill were determined according to model solutions by coding like in Table 9. Forest functions maps were prepared for each model Fig. 5. In this study, goal programming which is one of the operation research techniques was used in developing multi-objective forest management planning model.The goals were fully achieved. Moreover, for the tree goals, the optimum GP solutions presented wanted deviations with respect to the initial target values.
By using goal programming can be obtained alternatives solutions and thus decision making can be effectively made. A multi-objective forest management planning is possible with quantitatively determined of goals and prioritized to goals. With goal programming model developed by in this study, wood production, water production and soil protection function of forests were determined, yield, soil loss and water production matrixes were constituted. With simulation methods and al least four alternatives were presented making long period management prognosis. The target values were reached according to goal priorities.
Developed multi-objective forest management plan supplied necessity of a management plan which has a planning period at least as a rotation age. The plan gaine to a strategical plan.
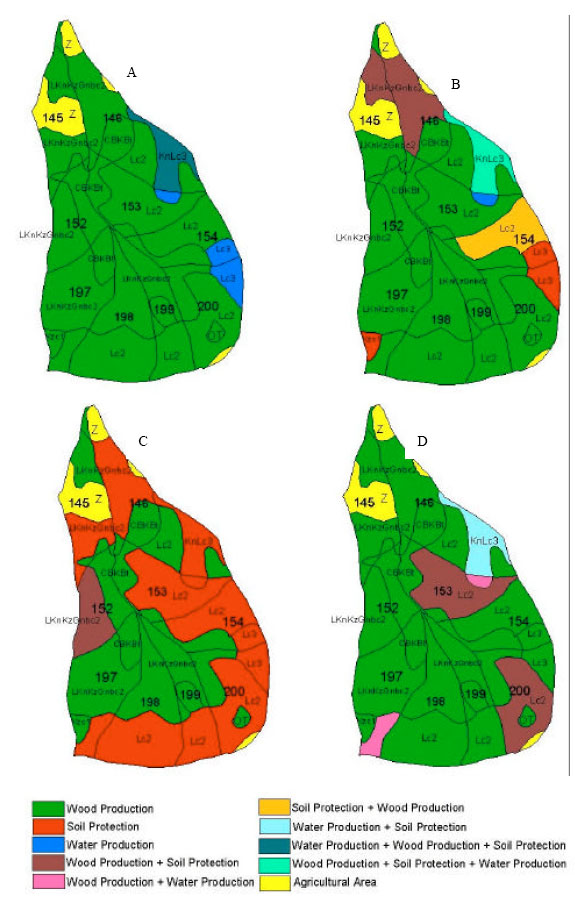 | |
| Fig. 5: | Forest Functions Maps (A; Model 1, B; Model 2, C; Model 3, D; Model 4) |
In addition to this planning period can be extended with the simulation and optimization techniques in this planning process. The plan has also the property of tactic and operational plan, because treatments can be spatially detailed according to both period and years.
REFERENCES
- Diaz-Balteiro, L. and C. Romero, 2001. Combined Use of Goal Programming and the Analytic Hierarchy Process in Forest Management. In: The Analytic Hierarchy Process in natural Resource and Environmental Decision Making, Schmoldt, D.L., J. Kangas, A.Z. Mendoza and M. Pesonen (Eds.). Kluwer Academic Publishers, New Jersey, pp: 81-95.
- Tamiz, M., D. Jones and C. Romero, 1998. Goal programming for decision making: An overview of the current state-of-the-art. Eur. J. Operat. Res., 111: 569-581.
CrossRef