
Kuang Yi
Sports College, Hunan International Economics University, Changsha, China
Journal of Software Engineering
Year: 2015 | Volume: 9 | Issue: 3 | Page No.: 561-573







ABSTRACT
The purpose of this study was to analyze the movement control of the low extremity by using biomechanical model during sprint running and provide the basis for technical analysis and optimization of sprint running. Three dimensional video graphic and Ground Reaction Force (GRF) data were collected from 8 outstanding male sprint runners performing sprint running at their maximum effort. The inter-segmental dynamics was quantified and the kinematics, the ground reaction force were analyzed during a running gait cycle of the maximal speed phase in sprinting. During stance phase, the muscle torques and the ground reaction torques are the main torques that tends to counteract each other for controlling the movement. Due to thigh angular acceleration and hip velocity, the INT has contributions to back swing of leg during later stance phase. It was concluded that during stance phase, the muscle torques and the ground reaction torques are the main torques that tends to counteract each other for controlling the movement. The INT due to thigh angular acceleration and hip velocity has contributions to back swing of leg during later stance phase. During swing phase, segment movement is controlled mainly by active muscle torques and motion dependent torques (due to leg angular acceleration) and their functions were opposite and canceled out.
PDF Abstract XML References Citation
Received: November 26, 2014;
Accepted: February 07, 2015;
Published: March 05, 2015
How to cite this article
Kuang Yi, 2015. Biosensing Mechanical Analysis on Movement Control of Sprint Running. Journal of Software Engineering, 9: 561-573.
DOI: 10.3923/jse.2015.561.573
URL: https://scialert.net/abstract/?doi=jse.2015.561.573
DOI: 10.3923/jse.2015.561.573
URL: https://scialert.net/abstract/?doi=jse.2015.561.573
INTRODUCTION
Sprint performances mainly are influenced by athletes fast swing ability of the lower limbs to fly, it is influenced by the support of the ground reaction force to withstand the impact capacity and the ability to quickly generate a reaction force to push the pedal effects (Giorgos and Elias, 2007; Wood, 1987). Thus, for the interaction moment between the three aspects of the lower extremities and influence them in the knee, hip joints, this study could help athletes and coaches understand the lower limb muscle coordination in support and vacated time of sprint, it controls movement, further understanding of the biomechanics of the human body in multi-joint movement control mechanism and the basis is provided for the technical analysis and optimized technology.
Kinetic aspects of the interaction must rearrange expressions through the reverse process of dynamic equations on motion limbs, the active muscle force and passive components of the reaction force are calculated, respectively. Accordingly, to explore how human movement by the active force and the impact force, in particular the segment interaction phenomena that occur during the movement between the limb. It has been applied in closed chain system for exercise (such as running support period) (Crosbie et al., 1997; Hunter et al., 2004) and open-chain systems for exercise studies (such as kick, throw, run vacated period) (Heiderscheit et al., 2005; Hoy and Zernicke, 1985, 1986; Putnam, 1993; Putnam and Dunn, 1987; Stief et al., 2008). Muscle torque and external torque of sprint support had been studied by Hunter et al. (2004) but the limitations of their study is in sprint acceleration phase. The muscle torque was calculated in the sprint study for the first time (Mann, 1981; Mann and Sprague, 1980) and they found the muscle produces a torque of knee flexion at the knee, this moment has been extended to the swing end from the support early. In response to this phenomenon, in connection with the late swing to action, thigh drives leg to pressure fast down, the role of knee flexion torque grip back quickly and it pushes the body forward with hip extension, the body is quickly through the pivot point just above (Mann and Sprague, 1980). Although the phenomenon explains the moment of functionality in this discussion, but it can not justify in the principles of mechanics. Because in running support phase, the body is influenced by gravity and ground reaction force, the produced results are generally considered to cause lower extremity joints to be compressed but in this time, if the active role of muscle torque is made to flexion, that the knee would not collapse and it can not support the body? Thus, Mann and Sprague (1980) explanation is not entirely convincing. Since then, Putnam (1991, 1993), Putnam and Dunn (1987), Mann (1981) and Mann and Sprague (1980) and others studied the vacated sprint period, football and other open-chain movement patterns and they found that balancing muscle torque (MUS) of the moment is the inertia moment which is caused by the movement (INT). However, the study did not mention which component part of the movement the moment of inertia mainly comes from and the velocity of the subject is lower, it is not conducive to analyze that the impact of motion control is caused by the moment of inertia. In other studies (Thelen et al., 2005, 2006), a neuromuscular model was used to explore the sprint lower limb motion control mechanism, these models are only limited in the vacated period.
In aspects of interactive dynamics (Hoy and Zernicke, 1985, 1986; Zernicke et al., 1991), the main features and advantages are that joint torques can be divided into a plurality of components, such as joint net torque (NET), gravitational torque (GRA), muscle torque (MUS), inertial torque (INT) and external torque (EXF).
MATERIALS AND METHODS
Test object: Subjects are selected, they are 8 outstanding young sprinters (Table 1).
Laboratory instruments: VICON infrared high-speed camera system comes from VICON company in English, the camera is MX13, the software version is WORKSTATION 5.1, it is a dedicated experimental clothing.
KISTLER 3-dimensional force platform comes from KISTLER company in Switzerland, its model is 9287B, these is the built-in signal amplifier, it is connect and synchronize with the VICON system through a digital to analog converter, it is firmly placed in specifically for this experiment, dug pit force platform is established in athletics venue.
Visual3D 3-dimensional analysis software comes from C-MOTION companies in USA. It realizes the data processing and analysis of the kinematics and dynamics.
| Table 1: | A list of all subjects in this study ( |
 | |
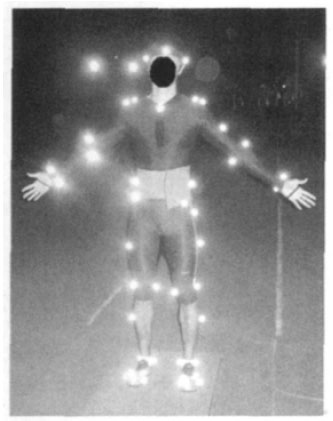 | |
| Fig. 1: | Marker location diagram on the body calibration |
Experimental procedure: High-speed infrared cameras are erected, shooting range is approximately 9x2x2 m3, the camcorder is connect with VICON workstation. VICON system is for setting and the shooting range three-dimensional space is calibrated.
Players adequate warm-up and wear special clothing in experiments, ball marker is placed, the position is shown in Fig. 1.
Starting position of players is about 40 m from force platform. Athletes obey password of the experimenter to run through the shooting area. At the same time, laboratory equipment is opened, experimental data is collected, each player needs to collect data twice successfully.
Data processing: A gait cycle is from right foot toe touchdown to the right foot toes touch the ground again, support cycle is from the right foot toe touch the force platform to right foot toe left the force platform.
The skeleton model is established according to Visual3D software, the body is divided into 14 sectors (Hay, 1993). Left iliac spine and trochanter point is proximal and distal of pelvis, pelvis proximal and distal radius are half the distance between the left and right iliac spine and trochanter point, pelvis depth is 0.144 m, the center of the knee is defined as the midpoint of the tuberosity inside and outside of the tibial bone, the ankle joint center is defined as the midpoint of the medial and lateral malleolus. Body weight is calculated by depending on the gravity center of the relative proximal part of the distal end and the measurement parameters for each link (Hinrichs, 1990). Low-pass filter is done to kinematic data by using a Butterworth digital filter, a cutoff frequency is 17 Hz (Winter, 2009; Yu, 1989), the low-pass filter also is made to the ground reaction force by Butterworth digital filter, a cutoff frequency is 55 Hz.
From interactive kinetic model (Hoy and Zernicke, 1985; Putnam, 1991; Baker and Harris, 2010), autonomic programming computers muscle torque between three links of the thighs, legs, feet and the interaction torque between the three aspects, active muscle torque is quantitatively analyzed how to influence lower limb movement, as well as a part of the movement is affecting another part of the movement. In this model, the joint torque includes the following components: Net joint torque, heavy torque, muscle torque, the inertia force, external torque. Wherein each torque relational expression is as follows:
Net joint torque (NET) = Weight torque (GRA)+Inertia torque (INT)+
External torque (EXF)+Muscle torque (MUS)
RESULTS
All subjects gravity average maximum speed is 9.69±0.31 m sec-1, steps length is 1.91±0.34 m, support time is 0.11±0.01 sec, flight time is 0.16±0.03 sec.
In support period, joint torque time curve of the knee and hip joints is shown in Fig. 2.
Muscular torque (MUS) of the knee and hip joints emerge a negative peak in touchdown early (0-5% of the support), while, ground side force EXF occurs a positive peak. Table 2 shows the support maximum muscle torque (MUS) of the knee, hip joints and external torque (EXF), the external torque and the Ground Reaction Force (GRF).
 | |
| Fig. 2: | Torque curve chart of the knee and hip joints in support cycle, +: Stretch joint torque, -: Flexion joint torque. NET: Net torque, MUS: Muscle torque, GRA: Gravity torque, INT: Moment of inertia. Area A: Supporting early (0-20%), Area B: Mid-stance (20~80%), C zone: A support late stage (80-100%) |
 | |
| Fig. 3: | Inertia torque weight-time curve of the knee and hip joints in support cycle, FAAT: Torque which the enough angular acceleration generates, FAVT: Torque of sufficient angular velocity, HLAT: Torque which hip line acceleration generates, LAAT: Torque which calf angular acceleration generates, LAVT: Torque of leg angular velocity, TAAT: Torque which thigh angle acceleration generates; TAVT: Torque of thigh angular velocity, +: Stretch the knee, -: Knee joint |
| Table 2: | Touchdown early MUS, EXF peak torque and EXF reaction force which is perpendicular to the ground ( |
 | |
In the knee joint, the remaining torque values are relatively small, it had no significant effect to the knee movement of the supporting cycle, but in the hip joints, after the support of 30%, the inertia torque (INT) role began to appear, the first to hip flexor, then to stretch the hip.
In support cycle, the inertia torque components of the knee and hip joints are shown in Fig. 3. The support inertia torque of the knee and hip joints are mainly from the inertia torque which lower leg, thigh and hip linear acceleration generate.
Support cycle curve of the calf, thigh angular velocity and angular acceleration is shown in Fig. 4. Figure 5 presents the double peak of ground reaction force, the maximum peak is 2816.67±321.79 N, it is about 5 times of the weight.
Figure 6 and 7 are knee, hip torque time curve (top) for the vacated term and the inertia torque-time curve of constituting components (below).
 | |
| Fig. 4: | In support cycle, the calf, thigh angular acceleration graphs, LAA: Calf angular acceleration, TAA: Thigh angular acceleration (+: Counterclockwise, -: Clockwise) |
 | |
| Fig. 5: | In support cycle, ground reaction graph, H: Horizontal ground reaction force, V: Vertical ground reaction force |
 | |
| Fig. 6: | In vacated period, time curve of torque and inertia torque component in knee joint, Area A: Initial swing (0-12%), Area B: Swing mid (12~60%), C: Oscillating stage (62-100%) |
| Table 3: | MUS, INT and LAAT peak of knee and hip joints in late swing ( |
 | |
| Table 4: | Angular velocity and angular acceleration peak of thigh and calf in late swing ( |
 | |
Muscle torque (MUS) and an inertial torque (INT) are substantially symmetrical distribution, there is a peak (Table 3) at the end of the swing, the other torque is small, it is no significant effect on the knee movement. Knee and hip joints INT constitute major of acceleration torque (LAAT) of the leg.
Figure 8 is the angle, angular velocity and angular acceleration-time curve of the lower leg and thigh in vacated period, at the end of the swing, the negative maximum acceleration of leg is in Table 4.
 | |
| Fig. 7: | In vacated period, time curve of torque and inertia torque component in hip joint, Area A: Initial swing (0-12%), Area B: Swing mid (12~62%), C: Oscillating stage (62-100%) |
DISCUSSION
Support period: The results show that in the support phase lower extremity joints, MUS and EXF are major role torques, MUS is major role in balancing EXF resistance (Fig. 2). In knee joint, INT and other torques are relatively small, there was no significant effect on the knee motion control in support period. In the early touchdown (5% support period), ground reaction have a greater extensor, hip flexor torque (EXF) in knee and hip joints (Fig. 2) by knee, hip joint front, this time, MUS main function is to fight EXF, to produce knees and hip extension torque (Table 2). In the supporting initial (0-20%), the direction of ground reaction forces in 20 msec or so is that the relationship between the longitudinal position of the knee and hip joint occurs continuously changes (Fig. 2: A zone), it leads to that EXF changes are relatively intense in the knee and hip joints, therefore, in this stage, to control the knee and hip muscles working conditions are relatively complex motion, it is a high risk of injury of lower limb muscle groups (Hunter et al., 2004; Wei and Liu, 2009; Schache et al., 2009).
In the end of the support (Fig. 2: C region), because ground reaction is gradually reduced (Fig. 4), EXT in the knee and hip joint has tends to zero while the knee joint MUS also tends to zero, but in the hip joint MUS, hip flexion torque has been transformed to hip extension torque which indicates that MUS in the hip joints no longer contribute to the lower extremities kicking in the end of the support, its main function is to balance the leg at the hip, thigh and the hip extension INT which is generated by hip lines angular acceleration (Fig. 3: A district; Fig. 4: A zone), as to prepare from the front of the thigh to the back swing (hip flexor).
 | |
| Fig. 8: | In vacated period, Calf and thigh angle, angular velocity, angular acceleration graphs, AV: Angular velocity, AA: Angular acceleration, LA: Leg angle, TA: Thigh angle, LAV: Leg angular velocity, TAV: Thigh angular velocity, LAA: Leg angular acceleration, TAA: Thigh angular acceleration. Angular velocity and angular acceleration direction, +: Counterclockwise, -: Clockwise |
This inertia torque led to leg produce a clockwise motion (after leg swing) after kicking off the ground in the lower extremities, the calf and thigh quickly are folded to reduce the turning radius of swing leg, making fast swing before, to help complete lower limb movement (control) in the vacated term.
By calculating the integral of the absolute value of MUS and EXT, in the knee joint, 70% MUS is used to overcome the effects of EXT and in the hip joints, a relatively small MUS (62%) was used to overcome EXT effect, the remaining part is used to balance the antagonism of INT (especially in 30% of the support later, it is the more obvious in the support end), so as to generate the hip joint angular acceleration.
Vacated period: The study found that the main torques of the lower limbs are MUS and INT in swing phase, other moments (such as GRA) is relatively small, there is no significant impact on all aspects of lower limb motion control. INT major component of the knee and hip are composed of the inertia torque which is generated by the angular acceleration of the lower leg (LAAT).
Because of the lower limb kicking action in the support cycle, a larger horizontal velocity of gravity center is obtained in the initial swing (0-12%), the greatest rate of change speed is taken in the hip and thigh. Therefore, the inertia torque (HLAT) of the hip joint is generated by the hip line acceleration, the inertia torque (TAAT) is generated by thigh angular acceleration, the duration of action is extended (Fig. 7: A region). Thigh and hip INT are weakened rapidly in swing mid (12~62%), MUS is enhanced, NET value is negative (Fig. 7: area B). Hip flexion movement is generated in hip joints at MUS role, the thigh gets maximum counterclockwise angular velocity in about 50% vacant period (Fig. 8: D point, Table 4). Since then (in the vacated late 62-100%) in the role of MUS, thighs produce angular clockwise velocity, counterclockwise motion of the thigh (hip flexor) is changed into a clockwise motion (hip extension), so that the thigh reaches the maximum angle before the calf (Fig. 8: E, F point), before the lower leg starts in the backswing (knee), the leg has begun to press the action (hip extension) which is consistent with many aspects of the movement from the proximal to the distal motion pattern (Putnam, 1993) and at the end of vacated period (80-90% in vacated period), MUS and INT reaches peak (Table 1). At this point, it mainly works for hip hamstrings and hip extensor muscles, so that hip extension purposes are reached after MUS balances INT.
Summary sprint flexor kicking technique shows that flexor and kicking techniques maintains a large muscle tension angle and muscle pull torque in support late vacant period (Huang, 2009; Zhao, 1995), thereby leg and low leg folding strength is increased, the former swing radius is shorten and swing speed is improved before the swing leg. Figure 4 and 8 show that in the supporting late of leg off the ground and instantaneous angular velocity and angular acceleration are negative, it indicates that calf does the accelerated motion clockwise, the calf and thigh are quickly folded to reduce the swing leg turning radius, it makes it quick put before, this point is consistent with sprint flexor and pedal technical requirements. However, the lower leg accelerated pendulum movement (clockwise) is whether it is caused by the larger muscle tension angle and muscle pull torque (hamstrings)? Experimental data show in Fig. 6, in 12~62% of the vacated period, MUS is the extensor torque at the knee joints, it is not flexion torque to put the knee torque to drive leg backswing. At this point, the main source of the leg backswing force is flexion inertia torque (LAAT, HLAT) which is produced by leg and hip line acceleration in the knee joint. MUS main function is to fight INT, the calf produce counterclockwise angular acceleration, angular velocity of the calf pendulum slows. The accelerated motion of swing leg is not made by flexion muscles (hamstrings) contraction and the related research EMG also has proved in this point (Yu et al., 2008), in the vacated period 0 to 62%, due to biceps femoris (BF) and semitendinosus (ST), the calf muscles backswing double joint activities are weak, but because of the support period, the athletes kick effort back in order to obtain the maximum level speed, thighs, legs and hips off the ground ago has a greater inertia torque (Fig. 2) at the hip joint. In vacated period (12~62%), lower leg drives backswing at the moment of inertia (Wang and Zhou, 2001) and obtains maximum speed clockwise (Fig. 8: A point) in about 15% of the swing phase. Thereafter, under the action of the extensor MUS, calf produce counterclockwise acceleration and gets maximum speed in the counterclockwise direction about the swing phase of 60% (Fig. 8: C point). This is similar to Putnam (1993) study on theoretical models kicking, running and other movements (Hinrichs, 1990), lower limb movement is transferred from the proximal to the distal end, the proximal end drives the distal motor. Therefore, in the process of high-speed running, the kicking back motion of the lower limbs are paid attention actively in support period, the calf, thigh and hip are made to get as much speed, there is a greater moment of inertia (INT) at the hip joints, in the vacated term, calf fast folding and front pendulum are important.
In late vacated (emptied of 60~100%) period, MUS and INT are the main control knee movement torque (Fig. 6: C zone). MUS main function is to balance against the INT, the INT mainly is generated by the lower leg at the knee joint angular acceleration (LAAT). The 95.77±7.30% of inertia torque INT value (Table 3) is accounted in which is generated by calf maximum angular acceleration (Fig. 8: B point), in the hip joint, the value LAAT has reached 88.25±20.28% of INT. Thus, in the vacated late, MUS's main function is to balance the INT, INT is constituted of torques which are primarily generated by the acceleration of the lower leg (Fig. 6 and 7). In about 80% of the vacant period, INT and MUS reaches maximum in knee and hip joints (Table 3). At this stage, dual-joint hamstrings muscles play a major role in hip extension and knee exercise, EMG studies also show that at this time, the Biceps Femoris (BF) and semitendinosus (ST) appear violent activities (Yu, 1989), the relevant studies have shown that, when hamstrings are stretched to the maximum length, it bear a greater load, a high-risk period hamstrings injury is occurred. So, at the vacated end, MUS main function of the knee balances INT which is generated by the leg at the knee joint angular acceleration, to slow swing speed front leg and to prevent knee hyperextension occurs in the vacated late (Mann, 1981), calf backswing occurs in the vacated late for preparing.
Cerebellar function is studied by the related interactive dynamics, the main role of the cerebellum is that the muscle torque is generated in the joints by the inertia moment (Bastian et al., 1996; Wickelgren, 1998), it is anticipated by other aspects of movement in the joints and compensate them, in order to achieve accurate human motion control objectives. Sprint speed and link swing speed are very fast, the moment of inertia is extremely clear, it indicates that sprinters are coordination, especially cerebellar function prediction and coordination of the moment of inertia is very strong.
CONCLUSION
By this study, during the initial stage of stance phase, the ground reaction force passes through in front of knee and hip joint, produces a knee extension torque and hip flexion torque. To counteract the torque of GRF, the hamstring muscle contracted and produced a flexion torque at knee (203.40±93.60 Nm) and an extension torque at hip (455.24±198.72 Nm). At the hip joint, the INT due to thigh angular acceleration and hip velocity has contributions to back swing of leg during later stance phase. During initial swing phase, the INT due to leg and thigh angular acceleration and hip acceleration has contributions to back swing of leg. The MUS and the INT are the dominating torques and their maximal values were 249.32±38.81, 194.01±30.90 Nm at knee joint and 650.81±101.06, 410.80±78.67 Nm at hip joint, respectively during later swing.
The link interactive dynamics is used to explore the sprint different moments of the support and vacated term plays the role in lower extremity motion control, each moment is quantitatively analyzed in the lower extremity joint motion effects and control mechanisms. Fast swing sprinter vacant on the lower extremities may be an action generated by the cerebellum control strategy to complete, through the repeated practice (learning) and to adapt, this strategy can predict the magnitude and of the inertia moment, the control lower limb muscle groups activities generate muscle torque, the main function of the torque is to balance the inertia torque which is generated by the other articulation, in order to achieve the objectives of the campaign.
The inertia torque is a strength source of femoral muscle stretch, its inertia torque (INT) is mainly constituted torque (LAAT) which is produced by the leg angular acceleration, MUS main role is to slow former swing speed of the leg, to prevent hyperextension of the knee and in vacated late, to prepare as the calf backswing actively.
REFERENCES
- Bastian, A.J., T.A. Martin, J.G. Keating and W.T. Thach, 1996. Cerebellar ataxia: Abnormal control of interaction torques across multiple joints. J. Neurophysiol., 76: 492-509.
Direct Link - Crosbie, J., R.D. Herbert and J.T. Bridson, 1997. Intersegmental dynamics of standing from sitting. Clin. Biomech., 12: 227-235.
CrossRefDirect Link - Giorgos, P. and Z. Elias, 2007. Effects of whole-body vibration training on sprint running kinematics and explosive strength performance. J. Sports Sci. Med., 6: 44-49.
Direct Link - Heiderscheit, B.C., D.M. Hoerth, E.S. Chumanov, S.C. Swanson, B.J. Thelen and D.G. Thelen, 2005. Identifying the time of occurrence of a hamstring strain injury during treadmill running: A case study. Clin. Biomech., 20: 1072-1078.
CrossRefDirect Link - Hinrichs, R.N., 1990. Adjustments to the segment center of mass proportions of Clauser et al. (1969). J. Biomech., 23: 949-951.
CrossRef - Hoy, M.G. and R.F. Zernicke, 1985. Modulation of limb dynamics in the swing phase of locomotion. J. Biomech., 18: 49-60.
CrossRef - Hoy, M.G. and R.F. Zernicke, 1986. The role of intersegmental dynamics during rapid limb oscillations. J. Biomech., 19: 867-877.
CrossRefDirect Link - Huang, D.W., 2009. Overview of hot topics in the study of theories on sprint techniques. J. Phys. Educ., 16: 77-82.
Direct Link - Hunter, J.P., R.N. Marshall and P.J. McNair, 2004. Segment-interaction analysis of the stance limb in sprint running. J. Biomech., 37: 1439-1446.
CrossRefDirect Link - Mann, R.V., 1981. A kinetic analysis of sprinting. Med. Sci. Sports Exercise, 13: 325-328.
PubMedDirect Link - Mann, R. and P. Sprague, 1980. A kinetic analysis of the ground leg during sprint running. Res. Q. Exercise Sport, 51: 334-348.
CrossRefDirect Link - Putnam, C.A., 1991. A segment interaction analysis of proximal-to-distal sequential segment motion patterns. Med. Sci. Sports Exercise, 23: 130-144.
Direct Link - Putnam, C.A., 1993. Sequential motions of body segments in striking and throwing skills: Descriptions and explanations. J. Biomech., 26: 125-135.
CrossRefDirect Link - Schache, A.G., T.V. Wrigley, R. Baker and M.G. Pandy, 2009. Biomechanical response to hamstring muscle strain injury. Gait Posture, 29: 332-338.
CrossRefDirect Link - Stief, F., F.I. Kleindienst, J. Wiemeyer, F. Wedel, S. Campe and B. Krabbe, 2008. Inverse dynamic analysis of the lower extremities during Nordic walking, walking and running. J. Applied Biomechanics, 24: 351-359.
PubMed - Thelen, D.G., E.S. Chumanov, T.M. Best, S.C. Swanson and B.C. Heiderscheit, 2005. Simulation of biceps femoris musculotendon mechanics during the swing phase of sprinting. Med. Sci. Sports Exercise, 37: 1931-1938.
Direct Link - Thelen, D.G., E.S. Chumanov, M.A. Sherry and B.C. Heiderscheit, 2006. Neuromusculoskeletal models provide insights into the mechanisms and rehabilitation of hamstring strains. Exercise Sport Sci. Rev., 34: 135-141.
Direct Link - Yu, B., 1989. Determination of the optimum cutoff frequency in the digital filter data smoothing procedure. J. Biomechanics, 22: 988-988.
CrossRef - Yu, B., R.M. Queen, A.N. Abbey, Y. Liu, C.T. Moorman and W.E. Garrett, 2008. Hamstring muscle kinematics and activation during overground sprinting. J. Biomech., 41: 3121-3126.
CrossRefDirect Link - Zernicke, R.F., K. Schneider and J.A. Buford, 1991. Intersegmental dynamics during gait: Implications for control. Adv. Psychol., 78: 187-202.
CrossRefDirect Link