
Yao Lin
Fujian Special Equipment Inspection and Research Institute, Fuzhou, 350002, China
Yanbin Liu
School of Mechanical Engineering and Automation, Fuzhou, 350108, China
Journal of Software Engineering
Year: 2015 | Volume: 9 | Issue: 3 | Page No.: 534-547







ABSTRACT
The increasing quantity and huge holdings of elevators have become important factors in energy consumption. Considering the elevator power flow in typical working conditions, the elevator energy feedback unit with super-capacitor was designed in this study. Then, the rule of energy classification was made and managed for the effective energy conversation in elevator system. Moreover, the energy consumption model of elevator system with the super-capacitor and the elevator system with solar energy and super-capacitor were developed. The experimental results show that the designed elevator system with the solar energy and super-capacitor has remarkable energy-saving feature and its energy-saving rate is 87% comparing to the traditional super-capacitor elevator system.
PDF Abstract XML References Citation
Received: October 18, 2014;
Accepted: January 15, 2015;
Published: March 05, 2015
How to cite this article
Yao Lin and Yanbin Liu, 2015. Simulation and Experiment Research on a New Elevator System with Solar Energy and Super-Capacitor. Journal of Software Engineering, 9: 534-547.
DOI: 10.3923/jse.2015.534.547
URL: https://scialert.net/abstract/?doi=jse.2015.534.547
DOI: 10.3923/jse.2015.534.547
URL: https://scialert.net/abstract/?doi=jse.2015.534.547
INTRODUCTION
The number of elevators increases dramatically with the rapid development of urbanization. Taking China for example, the number of elevators is about 2.9 million at the end of 2013 and the annual power consumption of total elevators is 60 billion kw h-1, i.e., energy consumption is huge. It is an urgent problem that how to apply the energy-saving technology effectively in elevators to realize the energy conservation and emission reduction.
At present, solar energy storage devices with common power supply mode is bulky and expensive, because of the low power density and the requirement of large quantities of parallel access. Besides the energy saving models of the elevator traction machine (Mohan and Undeland, 2004), elevator drive control and energy feedback (Shen et al., 2010; Wu et al., 2010), there is active energy feedback device to achieve energy saving. Due to the frequent start-stop, the models of the inverter and rectifier alternate quickly which reduces the reliability of devices. Moreover, the poor quality of the inverter output waveform causes the pollution to grid. Therefore, the research on high energy-saving technology in elevators has become a hot research area.
Energy saving elevator with renewable energy storage system has the superior characteristic of energy saving. Renewable energy can be stored in the system and provided for the elevator when in need (Zhang et al., 2012). The system stores energy in the peak stage of electricity power and it maintains the normal work of the elevator in the interruption stage of electricity power. In addition, Kong et al. (2007) used the technology of Variable Voltage and Variable Frequency (VVVF) to improve the quality of the elevator and the system realized the high-speed and safe operation to achieve energy saving. It is worth noting that the energy consumption evaluation is an important reference index for the elevator energy-saving performance. Ma et al. (2010) introduced a new method to evaluate the energy consumption of modern gear elevator, based on the operation data and the energy consumption data when the elevator with different loads runs between free floors. It is proved that VVVF speed regulation control is more energy-saving than the DC drive system by experiments.
In order to further improve the energy-saving performance in elevators, we investigate the solar energy-saving elevator which is compatible with frequency conversion variable pressure technology based on the power flow characteristics of elevator. Moreover, the energy consumption is evaluated on the basis of designing the energy management strategy.
METHODOLOGY
Power flow analysis of working condition: In order to drive the elevator with solar energy and electricity energy effectivity, the typical working conditions of elevator’s traction system are analyzed. As shown in Fig. 1, the elevator traction system can be considered as a force equilibrium system. The system is divided into four parts including a load, a cage, a traction sheave and a counter weight. The cage with load and the counter weight is suspended on the ends of traction sheave by wirerope and the wirerope is compressed on the groove of traction sheave due to gravity. When traction sheave rotates, the friction between wirerope and traction sheave drives the movement of cage and counter weight which makes the cage running up and down along the guide rail in the hoistway (Xu et al., 2006; Zhang et al., 2000).
Generally, in order to reduce the load of the traction machine, the proper weight of the counter weight is selected to ensure the cage stable. After the installation and debugging of the elevator, the weight of cage and counter-weight won’t be changed randomly. But the load may change at any time. Thus, we need to choose an appropriate equilibrium coefficient to make the elevator running close to the ideal state of balance.
 | |
| Fig. 1: | Simplified traction model of the elevator |
Equilibrium coefficient is an important performance index of driven traction elevator which is defined as:
| (1) |
where, K is the elevator equilibrium coefficient, W is the weight of cage, W1 is the weight of counter-weight and Q is the rated load of elevator.
According to different load, there are three different stress conditions of elevator traction wheels. The weight of the cage and the load is collectively referred to as the full load which is called load for simplification in the following text. Combined with the different running directions of the elevator, three operation states can be obtained as follows:
| • | Counter-weight>load: When the elevator is moving upward, it is in the state of renewable electricity generation due to feedback power of the traction. When the elevator is moving downward, it is in a state of the electric energy dissipation due to output power of the traction |
| • | Counter-weight = load: Whether the elevator is moving upward or downward, the traction has scarcely output power, only need overcome the friction while starting, acceleration or deceleration |
| • | Counter-weight<load: When the elevator is moving upward, it is in a state of the electric energy dissipation due to output power of the traction. When the elevator is moving downward, it is in a state of renewable electricity generation due to feedback power of the traction |
The speeding characteristics of the elevator with type-S (Thounthong et al., 2009) is shown in Fig. 2. The process of an acceleration and deceleration of the elevator can be divided into seven stages as follows:
| • | 0~t1, the jerk is constant. The ratio of the acceleration increases and the elevator begins to accelerate |
| • | t1~t2, the jerk jumps to zero. The acceleration is constant and the ratio of speed rises |
| • | t2~t3, the jerk becomes negative. The ratio of acceleration decreases and the speed continues rising |
 | |
| Fig. 2: | Velocity, acceleration and jerk curves of the elevator |
| • | t3~t4, both the jerk and acceleration are zero and the elevator operates with constant speed |
| • | t4~t5, the jerk and the acceleration are negative but the absolute value increases. Thus the elevator begins to decelerate |
| • | t5~t6, the jerk jumps to zero with constant acceleration and the ratio of speed decreases |
| • | t6~t7, the jerk turns into positive value and the acceleration remains negative but the absolute value decreases. Thus the speed continues decreasing until the elevator stops running |
In view of Fig. 2, we can get velocity equations of the elevator in the upward moving stage as follows:
 | (2) |
Similarly, the velocity equations of the elevator in the deceleration stage are:
 | (3) |
Taking the derivative of the kinetic energy and potential energy, respectively the equations of the kinetic power and potential power are obtained as:
 | (4) |
According to the potential equation, the potential power depends on the load condition and the running direction of the elevator. The elevator running status can be divided into four kinds of typical working condition as follows:
 | (5) |
Noting Eq. 4, we have that the area surrounded by the power curve and the horizontal axis is the total energy consumption of the elevator traction system. The part above the horizontal axis presents energy consumption of the elevator and the part below the horizontal axis denotes the feedback energy of the elevator.
In the view of the typical working condition of the elevator running system, we can design the elevator system based on solar energy and super capacity to maximize the energy saving effect and make full use of solar energy in various conditions.
Elevator system with solar energy and super-capacity: The power grid with solar energy is a fascinating way to saving energy. When the elevator is in the power generation state, solar energy is absorbed and stored and it is provided through the power grid (Li and Chen, 2007; Hu et al., 2013) when the elevator demands for external energy.
In order to obtain reliable system performance, we design an energy-saving system with solar energy and super-capacitor which can be effectively embedded in the elevator and compatible with the variable frequency voltage technology of current elevators. As show in Fig. 3, the system includes solar photovoltaic unit, hybrid energy storage unit and energy feedback unit, etc. When the power grid breaks down, the seamless access of solar energy can be achieved automatically. Moreover, the system can realize energy feedback in the state of electricity generation without the pollution of the electric grid (Shen, 2012).
The working principle of the device is shown in Fig. 3. DC/DC converter works in boost mode when the energy storage unit in this system has enough energy which can raise the DC BUS voltage until it exceeds AC/DC rectifier voltage of the rectifier module. On this condition, the AC/DC rectifier module of the inverter is in the anti-pressure state and AC/DC module does not work. Thus the frequency converter is disconnected from the grid and the energy needed for the elevator is obtained from the energy storage unit of the system.
 | |
| Fig. 3: | Schematic of the solar energy saving system with super capacitor |
On the other hand, when the energy from energy storage unit is insufficient, DC BUS voltage can't be raised by DC/DC converter and consequently drops. Finally, AC/DC module automatically starts to work and the energy is obtained from the grid when the DC BUS voltage is lower than the rectified voltage of AC/DC module.
These two modes can be automatically switched according to the storage situation of the energy storage system in the device. Moreover, the energy needed for the elevator can automatically get from the grid when the energy storage system does not work. Thus, the reliability of elevator is improved effectively.
Energy management with super-capacity
Division rule of super-capacity capacitance: Super-capacitor is the key component of the solar energy-saving device. We define the voltage of super-capacitor as a threshold value and the capacitance of super-capacitor can be divided according to the following rules (Li et al., 2010) to manage the stored energy effectively.
Threshold of static voltage for super-capacitor is set as Ua which is also called the initial voltage. Switching voltage threshold of EPS input terminal is set as Ub.
Boundary threshold value between capacitance space 1 and 2 is set as Uc. Super-capacitor energy storage system plays a key role of power compensation on the condition of the voltage of the super-capacitor group when it higher than Uc. When the voltage value is lower than Uc, the power compensation of super-capacitor energy storage system will be stopped.
The lower limit of output voltage of super-capacitor is set as Ud which is the boundary voltage between capacitance space 2 and 3. Once the voltage value of the super capacitor group drops below this value, the output of all super-capacitors will be stopped.
The upper limit of output voltage of super-capacitor is set as Ue which is the boundary voltage between capacitance space 2 and 3. Once the voltage value of the super-capacitor group is higher than the boundary voltage value, the super capacitor energy storage system will stop to charge the super-capacitor. At the moment, the super-capacitor group would no longer receive regenerative energy of elevator. Instead, the excess regenerative energy will be discharged through the discharge circuit (Fig. 4).
 | |
| Fig. 4: | Division rule of the capacitance of super-capacitor |
 | |
| Fig. 5: | Energy-saving equipment and the wire map of frequency converter |
Energy management strategy: Considering the super capacitance partition rules, the appropriate strategy of energy management is designed (Shen, 2012; Rufer and Barrade, 2002) as follows.
Solar power compensation and power supply switching: The DC BUS of super-capacitor energy storage system and elevator driving system (elevator inverter DC BUS) is directly connected in parallel as shown in Fig. 5. The voltage difference ΔU1 of DC BUS between static voltage and dynamic voltage will be monitored in real-time. When ΔU1 meets the set value, the controller activates positive onset with bidirectional DC/DC. The energy-saving devices using the storage system with the solar energy and super-capacitor provide driving electricity power for the elevator. When ΔU1 does not meet the set value, the system will switch to the power grid automatically and supply the elevator for power directly until the compensation voltage value of the super-capacitor energy storage system that utilizes the solar power reaches the set threshold value. Thus the acceleration start of the elevator and power compensation at runtime are achieved by the solar power.
Recovery of renewable energy: When the elevator is in the state of renewable power generation and the voltage of super-capacitor group does not exceed the upper limit voltage, the controller will immediately start the bidirectional DC/DC circuit for reverse conducting on the condition of ΔU2 meeting the set value. Then, the feedback regeneration power from DC BUS will be stored in the super-capacitor group. In the processes, the voltage Udc of DC BUS is always stable in the DC 580-620 V. If the detected terminal voltage of the super-capacitor group surpasses the upper limit voltage (corresponds to the threshold Ue), the bidirectional DC/DC would be turned off immediately. Then the bleeder circuit which is connected in parallel with the DC BUS in the variable-frequency drive is at work and the excess energy will release.
Auxiliary power system: In order to make full use of renewable energy of elevator, the energy of super-capacitor group will be converted to 220 V AC power for lighting, refrigeration, controller and other auxiliary systems through EPS, when the voltage of super-capacitor group is above the threshold value Ub. On the other hand, the super-capacitor group will stop to supply power for auxiliary systems, when the voltage of super-capacitor falls below the threshold value Ub. Instead, the auxiliary systems are supplied by the mains electricity power with EPS.
Emergency relief: The sudden power failure will cause serious malfunctions in the running process of elevators and some people would even be trapped, especially when the elevator is in the higher floors. It is difficult to determine which floor the people trapped in when the elevator broke down in the higher floor. The rescue is much difficult and we cannot rescue the trapped people in the elevator in time. At this moment, the reserved emergency rescue capacity of super-capacitor energy storage system works and promotes the elevator to reach the nearest floor. As long as the super-capacitor terminal voltage is higher than the threshold value Uc (the storage space 2 as shown in Fig. 4), the emergency relief can be achieved in the state of elevator power failure. When the voltage is below the threshold voltage value Ud, the voltage is too low to achieve the driving of the tractor.
Energy consumption model: With these strategies of energy management, the energy consumption model and quantitatively analyze energy-saving effect of the system can be further studied. In the state of normal running, the total power P in this model incorporates the input power Pm of the elevator motor, the power Pd of open/close door and the no-load power Pk (Tian et al., 2009), namely:
| (6) |
The energy consumption calculation model of traction elevator which is driven by typical permanent magnet synchronous motor is shown in Fig. 6. In the speed module, the displacement, running speed and acceleration of the elevator are determined depending on the starting floor, target floor and the height between starting floor and target floor. On the basis, the electromechanical coupling model is utilized to obtain input power of elevator motor, coupling with the no-load power and the power of switch door. Finally, the total running energy consumption according to the calculation of running power and run time are obtained for the theory and experiment investigations.
Simulation: Based on the energy consumption theory and the calculation model shown in Fig. 6, the program in Matlab/Simulink environment was wrote and the simulation model of traction elevator energy consumption driven by permanent magnet synchronous motor was created, as shown in Fig. 7. The key parameters of the elevator are listed in Table 1. Theoretical feedback energy of elevator is slightly different between the devices without energy feedback and devices with energy feedback but the calculation model of energy consumption is consistent.
 | |
| Fig. 6: | Energy consumption model of traction elevator with permanent magnet synchronous motor driving |
 | |
| Fig. 7: | Simulation model of traction elevator energy consumption |
 | |
| Fig. 8: | Simulation results of speed and power of elevator without load |
| Table 1: | Key parameters of the elevator |
 | |
Based on the above model, numerical calculations at the load of 0, 50 and 70% were achieved, respectively. The power and velocity features are shown in Fig. 8 and 9.
According to the above simulation results, when the elevator lifts up with the 50 and 70% rated load (i.e., upward with heavy load), the traction motor is in the state of motor-driven and its power varies obviously. The running power of the elevator in the stage of uniform motion is influenced by the load greatly.
 | |
| Fig. 9: | Simulation results of speed and power of elevator with typical loads |
 | |
| Fig. 10(a-d): | Simulation results of the elevator motion |
When lifting up with light load or lifting down with heavy load, the motor is in the state of charging power. It can be considered as a no-load power which does not vary with load changing. When lifting up with light load or lifting down with heavy load, the motor is in the state of power generation and varies greatly and the power will increase with the load increasing.
According to the rated speed, acceleration and lifting height, some key parameters including upward the displacement, velocity, acceleration and jerk of the elevator can be calculated based on the motion module of the model as shown in Fig. 10. Obviously, the upward and downward curves are symmetric.
RESULTS AND DISCUSSION
To verify the energy-saving effect of the elevator system with solar energy and super-capacitor, the contrast experiments with the traditional energy system were investigated. The experimental system shown in Fig. 11 consists of the main unit of elevator, control cabinet, simulating well modules and other components. The solar energy device mainly consists of solar power supply system (including solar panels, solar controller and batteries), bidirectional DC/DC power (including 6 kW DC/DC and 12 kW DC/DC) and the super-capacitor energy storage device as shown in Fig. 12
The experimental results of traditional elevator system without the energy-saving device are illustrated in Fig. 13. The energy consumption equation is J1 = Σ(P1xt) where the parameter t denotes the operation time of the elevator. The experimental results of elevator with solar energy and super-capacitor are shown in Fig. 14 and its energy consumption equation is J2 = Σ(P2xt). Comparing with the calculated results of the traditional elevator with the consumption energy of 197105 J, the saving energy of the elevator with solar energy and super-capacitor is 171761 J. So, we can conclude that the elevator with solar elevator and super-capacitor has obvious energy saving results comparing with the traditional elevator.
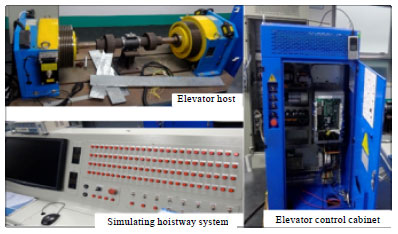 | |
| Fig. 11: | Test equipment of the elevator |
 | |
| Fig. 12: | Equipment of solar panel and super capacitor |
 | |
| Fig. 13(a-b): | Experimental results of the traditional elevator system |
 | |
| Fig. 14(a-b): | Experimental results of the designed elevator with solar energy and super-capacitor |
The results of the simulation and experimental show that designed energy evaluation method of energy consumption and strategies of energy management in this study is fine and the designed elevator system with solar energy and super-capacitor has remarkable energy-saving effect.
Compared to the traditional elevator drive control and energy feedback model (Shen et al., 2010), the designed elevator system with the solar energy and super-capacitor has remarkable energy-saving feature and the peak power has been reduced greatly from 4710 to 478 W. Moreover, the output current and waveform are also stable, shown in Fig. 13 and 14 and finally lead to the strong reliability of elevator system and the power grid.
Due to the input of solar energy with improved energy management strategy, the energy efficiency of the new elevator system is greater than the technology of Variable Voltage and Variable Frequency (VVVF) (Kong et al., 2007). Furthermore, the new system does well when the sudden power failure occurs and it promotes the elevator to reach the nearest floor to rescue the trapped people in the elevator in time. It is worth noting that the amount of solar energy acquirement will be improved with the development of intelligent building under the trend of “Third Industrial Revolution”.
CONCLUSION
Considering the problem of huge amount of elevator energy consumption, the energy-saving elevator system with solar energy and super-capacitor was investigated to realize the energy conservation. Compared to the traditional devices, the solar energy-saving elevator with energy management strategy is developed and is compatible with frequency conversion variable pressure technology.
The transient characteristic of the elevator power flow was analyzed firstly and the energy feedback unit of elevator was designed based on dynamic characteristics of the super-capacitor and bidirectional DC/DC technology. Then, the energy consumption model with solar energy and super-capacitor in the elevator system and the rule of energy classification and management of the super-capacitor capacity were made. The system has realized that the automatic switching between solar energy-saving devices and power grid.
The proposed model can accurately evaluate the elevator energy consumption based on the numerical calculations and it verified by the experimental results which show that the energy-saving elevator with solar energy and super-capacitor has more effective energy saving than the traditional elevators.
ACKNOWLEDGMENT
This work is supported by the National Science and Technology Project of China Quality Inspection Administration (Grant No. 2009QK204, 2009QK207).
REFERENCES
- Shen, R., Z.Q. Zhang, Y. Dong and L. Ye, 2010. A design for energy-feedback control system on elevator energy-saving. J. Henan Univ. Sci. Technol. (Nat. Sci.), 31: 27-30.
Direct Link - Wu, L., B.J. Yuan and P.C. Li, 2010. Design of the elevator energy feedback and grid connecting system based on neural network hysteresis control. Power Electron., 44: 9-11.
Direct Link - Kong, W.R., W.B. Zhu and J.G. Jiang, 2007. Design of the dual-PWM control energy feed-back elevator drive system based on DSP and IPM. Electr. Drive, 37: 8-11.
Direct Link - Xu, B., B. Zhang and J.J. Lin, 2006. Energy consumption characteristics of VVVF controlled hydraulic elevators. Chin. J. Mech. Eng., 42: 137-141.
Direct Link - Zhang, L.M., H.Y. Yang and Y.X. Lu, 2000. Research on speed control system of VVVF hydraulic elevator with energy feedback. Chin. J. Mech. Eng., 36: 61-65.
Direct Link - Li, G.Y. and Y. Chen, 2007. Design and simulation of hybrid-drive system with battery pack and capacitors. J. Syst. Simul., 19: 101-105.
Direct Link - Hu, Z.W., Z.N. Guo, Z.L. Liu and J.N. Lin, 2013. Design the solar energy and electricity switching system used the uhracapacitor. J. Huaqiao Univ. (Natl. Sci.),.
Direct Link - Shen, S.S., 2012. Research on the super capacitor-based flexible energy storage system for elevator drive systems. J. Shanxi Univ. (Nat. Sci. Edn.), 35: 515-519.
Direct Link - Li, P., C.B. Jia, Y.M. Wen and X.S. Li, 2010. Study on the power storage and management circuit of a magnetoelectric self-powered harvester. Chin. J. Scient. Instrum., 31: 2629-2635.
Direct Link - Thounthong, P., S. Rael and B. Davat, 2009. Energy management of fuel cell/battery/supercapacitor hybrid power source for vehicle applications. J. Power Sourc., 193: 376-385.
CrossRefDirect Link - Rufer, A. and P. Barrade, 2002. A supercapacitor-based energy-storage system for elevators with soft commutated interface. IEEE Trans. Ind. Applic., 38: 1151-1159.
CrossRefDirect Link - Zhang, J.J., Z. Zhao, H.M. Chen and L. Cui, 2012. EasiSolar: Design and implementation of a high-efficiency solar energy-harvesting sensor node system. Chin. J. Scient. Instrum., 33: 1952-1960.
Direct Link - Tian, D.W., D.G. Xie and S.M. Cui, 2009. Hybrid energy control strategy for hybrid electric drive system in military vehicle. J. Mech. Eng., 45: 41-47.
Direct Link