
Lu Zhaogan
School of Computer and Information Engineering, Henan University of Economics and Law, Zhengzhou, 450002, China
Liu Yujiong
School of Computer and Information Engineering, Henan University of Economics and Law, Zhengzhou, 450002, China
Wan Jinliang
School of Computer and Information Engineering, Henan University of Economics and Law, Zhengzhou, 450002, China
Chen Kerui
School of Computer and Information Engineering, Henan University of Economics and Law, Zhengzhou,
450002, China
Journal of Software Engineering
Year: 2013 | Volume: 7 | Issue: 1 | Page No.: 39-45







ABSTRACT
In this study, one system simulation model with multiple interfering was described for proximity radio detectors. Actually, it’s one system simulation frame and could be customized according to their most working conditions. Using the space scene model constructed by 3ds Max 2010, multiple detectors and interfering machines could be configured easily in one setting window. Furthermore, the received signal for one detector was evaluated while other detectors were considered as interfering machines. One test scene case was provided in this study to verify the system simulation results. The simulated signal waveform could disclose the movement process of the detectors in the scene models.
PDF Abstract XML References Citation
Received: January 13, 2013;
Accepted: February 23, 2013;
Published: April 30, 2013
How to cite this article
Lu Zhaogan, Liu Yujiong, Wan Jinliang and Chen Kerui, 2013. System Simulation Models with Multiple Interfering for Proximity Radio Detectors. Journal of Software Engineering, 7: 39-45.
DOI: 10.3923/jse.2013.39.45
URL: https://scialert.net/abstract/?doi=jse.2013.39.45
DOI: 10.3923/jse.2013.39.45
URL: https://scialert.net/abstract/?doi=jse.2013.39.45
INTRODUCTION
During the design of proximity radio fuzes (Wang et al., 2007), a lot of test data must be provided so that the performance and evaluation could be verified. In fact, the working environments and scenarios were constructed and simple entries were used for the possible targets. Then, the radio generator transmits the radio that would be used by the designed radio fuzes and receiver equipment receives the echo radio signal returned back by the possible targets (Zhang et al., 2011). Obviously, this approach would take a lot of time and money which was not economic in the current advanced computer era. At the same time, the designed fuze radio detector has to be tested or verified in different scenarios which was not all possible constructed by actual objects. Furthermore, the actual constructed scenarios could not be similar to the designed cases and these data from these scenarios could not be fit the designed fuze radio detector. So, how to construct the computer simulation platform of radio fuzes was one alternative approach to avoid these problems.
Up to now, there were few studies or papers that devoted to the radio fuze simulation platforms. What’s more, only several echo signal simulation methods (Qiuju and Cuiqiong, 2010; Xu et al., 2009) of radio fuzes and radar were presented by a few papers. The presented echo simulation methods were those based statistic characteristic and their simulated echo signals were not the data of one given targets. These simulation results don’t contain any information of fuze modulation modes and the Doppler frequencies. Aiming to the target model, many researchers, Jinsheng and Qinwei (2005), Tao et al. (2004) and Hongfei et al. (2006) tried to use mathematics formula to describe the shapes, sizes and movements of the possible targets. However, this approach could not be successful for most actual targets with various complex shapes and movement traces. Therefore, one target was divided into large numbers of scatters and their echo signals were summed up to form its echo signal (Anying, 2005; He, 2008). The problem was how to do it and it was not given in these studies. This study would study one system simulation models that can avoid these problems.
In this study, one system echo simulation model based MATLAB Simulink was described for the proximity radio detectors with existing multiple interfering which would be very useful to improve the efficiency of radio detector design teams. The model uses the 3ds Max 2010 scene files as the working environment of radio detectors and the VRML plug-in ActiveX control as the Display windows in MATLAB Simulink.
CONSTRUCT SPACE MODELS
As the professional 3D model constructing tool, the 3dS Max 2010 was widely used in the 3D geometry models, i.e., entries in games, objects and so on. In order to simulate the actual working environments of proximity radio detectors, the 3dS Max 2010 was used to set up the scenes with the considerations of weather, sea conditions, cloud, frog, temperature and so on.
Here, one 3D geometry scene was constructed according to the configuration simulation requirements, as shown by Fig. 1. There were 5 scene entry objects in the scene ‘boxtest’, i.e., Box, missile, cone01, sphere01 and cylinder01 and so on.
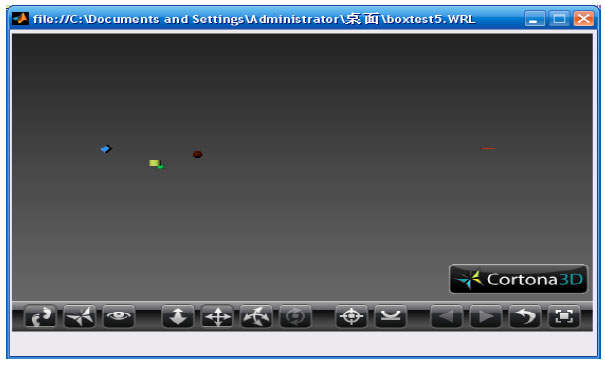 | |
| Fig. 1: | Boxtest scene model |
| Table 1: | Configuration parameters of the scene model ‘test’ |
 | |
The entries, ‘Box’ and ‘missile’ were the active objects; ‘missile’ and ‘cone01’ were configured as radio detectors while ‘sphere01’ and ‘cylinder01’ were static objects during the simulation conditions. As observed in the scene display window, i.e., Fig. 1, scene objects were substituted by simple geometry entries such as cuboids, spheres, columns, or tapers. With bad modeling ability to control 3ds Max 2010 models, we used these simple geometries as substitutes to verify the system simulation method and the rigorous 3D scene geometries by professional workers would replace these simple ones when actual scene models were used for system simulations.
In the ‘boxtest’ model, each scene objects was actually the actual substitutes in the working environments of proximity radio detectors. So, their properties, initial locations, movements were given by Table 1 and these information were used to deduce their location changes with simulation process. When one scene object was substitute of one interfering machine, it was configured as interfering machine. In the similar way, one scene object of one detector would be configured as one detector. Here, ‘yes’ indicated that one scene object was one detector or interfering object. Furthermore, the scene objects as interfering machines and detectors, were also described with the system working modes and their relative parameters, i.e., sender power, antenna gain shape, initial phase, radiation resistance, carrier frequency and so on.
SIMULATION MODEL AND ITS CONFIGURATION
As the system mode of the simulated proximity radio detectors and interfering was continuous wave, one echo simulation model was constructed by MATLAB Simulink, as shown by Fig. 2, where, the sheltering angle was set to 0.00175, the speed of electromagnetic wave as 3x108 m sec-1, the minimal detecting power -50 dBm, the input sample frequency 20 kHz, the output sample frequency 170 kHz, the simulation time 0.1 sec. What’s more, the echo simulation module was configured in the window as display by Fig. 3 and the main parameters were set in the window as shown by Fig. 4. The shapes of antenna gain for detectors and interfering machines was in the form of circle.
 | |
| Fig. 2: | Simulation model of proximity radio detector with ‘boxtest’ scene model |
 | |
| Fig. 3: | Parameter configuration interfaces for echo simulation models |
 | |
| Fig. 4: | Configuration window for system parameters |
SIMULATION RESULTS
In current space scene model, there were two detectors and one interfering and the echo signal for the two detectors should be evaluated, respectively. For one detector, its echo signal should be computed with other detectors as interfering machines. Meanwhile, the detectors and interfering machines were the actual entries in the scene, their echo signal to one given detector were also considered as interfering signals. That’s to say, they were viewed as general scene objects and their echo signals were also be summed together as the received signal of detectors.
After the simulation model was evaluated, we got the echo signals of ‘Detector1’ and ‘Detector2’, respectively, as shown by Fig. 5. Here, ‘Detector1’ was denoted as the radio detector of the ‘missile’ while ‘Detector2’ denotes the detector ‘cone01’. During the whole simulation process, the ‘missile’ would meet ‘Box’ firstly and then pass by the entries, i.e., ‘cone01’, ‘sphere01’ and ‘cylinder01’, respectively.
Figure 6 showed the zoomed in signal waveform and the meeting process could be reflected from the received signal at the receiver of ‘Detector1’. When the ‘missile’ met the ‘box’, the received signal would be enlarged quickly. Furthermore, the received was much smaller when compared to the case above, as the ‘missile’ was not at the opposite of those scene objects, i.e., ‘cone01’, ‘sphere01’ and ‘cylinder01’, respectively. However, for the detector ‘cone01’, its position was unchanged and its received echo signal from those objects in its view has little changes even if when the ‘missile’ and ‘box’ passed by.
 | |
| Fig. 5: | Simulated echo signal by current simualtion model |
 | |
| Fig. 6: | Zoomed in signal for the echo signal at Detector1 |
This phenomenon was indicated by the received signal strength, i.e., the strength of its waveform front end was little larger than that of its back end.
According to the simulation results, it could reflect simulate the received signal in the case with multiple detectors and interfering machines. It could be used for the evaluation of complex war-field environments.
CONCLUSION
In this study, one simulation model with multiple detectors and interfering machines was described for the proximity radio detectors which was the working environments where the proximity radio detectors work. The simulation model involves space scene models, echo signal evaluation and energy loss in the propagations of electromagnetic waves. Finally, the simulation results were presented for the simulation models with special space model constructed by 3ds Max 2010 and verified the accuracy in the case of actual cases.
ACKNOWLEDGMENTS
This study was supported by the Henan Basic and Advanced Technology Research Program (122300410380), the Key Research Project of Science and Technology by Henan Ministry of Education (12A510001), the Science and Technology Research Program of the Education Department of Henan Province of China under Grant No.12A120002.
REFERENCES
- Hong, Z., M. Xue and J. Wang, 2004. The research of the radio fuze radio frequency simulation. Guidanc Fuze, 25: 18-22.
Direct Link - Zhang, A., Z.Q. Lu, H.Q. Fan and Q. Wang, 2011. Echo simulation of LFM radar for ship target based on scattering center model. Radar Sci. Technol., 9: 316-320.
Direct Link - Ma, A.Y., 2005. Echo simulator of frequency modulation radio fuze. Guidance Fuze, 26: 16-19.
Direct Link - Wang, C., X.F. Zhang and N.C. Yuan, 2007. Method for ISAR echo simulation. J. Syst. Simul., 19: 4639-4703.
Direct Link - Ren, H.M., Z.H. Xiao and X.F. Yuan, 2006. Simulation of the moving targets in the complex background. Syst. Eng. Electron., 28: 336-338, 398.
Direct Link - Li, J. and Q.W. Wang, 2005. Research and technology for SAR echos simulation. Comput. Simul., 22: 268-270.
CrossRef - Chen, Q.J. and C.Q. Mo, 2010. The credibility analysis for recognition-oriented radar target echo simulation. Radar Sci. Technol., 8: 54-59.
CrossRef - Xu, L., S. Yuan, K. Li and W. Jiang, 2009. Simulation of motion modeling and wideband radar echo of non-rigid target. Mod. Electron. Tech., 23: 8-10.
Direct Link