
Kiam Beng Yeo
Unit Kajian Bahan dan Mineral, Sekolah Kejuruteraan dan Teknologi Maklumat, Universiti Malaysia Sabah, Jalan UMS, 88400, Kota Kinabalu, Sabah, Malaysia
Cheah Meng Ong
Unit Kajian Bahan dan Mineral, Sekolah Kejuruteraan dan Teknologi Maklumat, Universiti Malaysia Sabah, Jalan UMS, 88400, Kota Kinabalu, Sabah, Malaysia
Journal of Applied Sciences
Year: 2014 | Volume: 14 | Issue: 11 | Page No.: 1131-1138







ABSTRACT
This study discussed the preliminary design of marine propeller through defining its geometries. Basic propeller geometries are being described initially with parameters such as rake angle, skew angle and pitch to diameter ratio. Changes of geometries were implemented on chords profile for the Wageningen-B or Troost series of marine propeller. The CAD tool was successfully utilized to develop the marine propellers profiles for a whole range of possible parameters in the Troost series propeller.
PDF Abstract XML References Citation
Received: November 25, 2013;
Accepted: January 05, 2014;
Published: March 24, 2014
How to cite this article
Kiam Beng Yeo and Cheah Meng Ong, 2014. Fixed-pitch Marine Propeller Geometry Design. Journal of Applied Sciences, 14: 1131-1138.
DOI: 10.3923/jas.2014.1131.1138
URL: https://scialert.net/abstract/?doi=jas.2014.1131.1138
DOI: 10.3923/jas.2014.1131.1138
URL: https://scialert.net/abstract/?doi=jas.2014.1131.1138
INTRODUCTION
A basic mechanism of a marine propeller is to match with the engine’s output, shaft speed and its operating performance with physical size or load of the vessel (Gerr, 2001). Evolution of marine propeller being widely used in the market recently was the invention of Robert Hooke in the watermill design principle (Carlton, 2007). The marine propeller usually consists of fixed type or controllable type of pitch propeller.
Controllable pitch propeller is a complicated and expensive design with mechanical mechanism that allows forward and backward movement of ship with a very flexible pitch adjustment along its operation depending on the loading capacity and speed required (Kamome Propeller Co., 2012). On the other hand, fixed pitch propeller is very common in the market due to its simplicity of mechanism joint, extensive use with variety of size, range and most importantly, cheaper in price. Also, fixed pitch propeller is easier to operate and analyse due to its fixed geometry that makes it the more popular type of propeller among researchers.
Engineering analysis and design of marine propeller’s blade profile is critical as it will directly affect the production of flow pattern in each sweep of rotational motion. Also, marine propeller blades suffered from interferences which are caused by miscellaneous elements such as damages, wear and tear on its solid body that will then influenced the efficiency and its flow pattern. Effects that created by these unwanted properties are known as erosion, vibration, noise and cavitations (Mihaela, 2005).
Increasing in efficiency and reduction in cavitation, noise and vibration with lower energy require to operate the propulsion system is the current trend being investigated by most researchers (Mihaela, 2005). Marine propeller design in patterning the hydrofoil shape and hydrodynamics performance in non-uniform flow is the most common and important analysis which become an interest of researchers to predict the optimum ability of the propeller. Preliminary design may provide some constraints on the principle dimensions, parameters and conditions for incoming stages of analysis.
MAN (2012) analyzed the efficiency range that can be produced by fixed pitch marine propellers with 3 to 6 blades under the same revolution had shown that 3 blades marine propeller produced the highest efficiency while 6 blades marine propeller produced the lowest efficiency. However with lesser number of blades on the propeller indicates that it will require a larger size of diameter to obtain the equivalent hydrodynamics performance as those with more blades. MAN’s result is also supported by another three famous propeller manufacturers such as AB Volvo Penta (1998), Michigan Wheel Corporation (2012) and Evinrude and Johnson Co. (2001).
Wageningen-B or Troost series of marine propeller is most widely used and developed propeller series over the world, which is invented by Prof. Dr. Troost (Carlton, 2007). This series of propeller provides a slow to medium speed of movement, very excellent performance and simplicity in design. Also, this propeller series has a range of pitch ratio 0.6 to 1.4 with 3 to 7 blades and categorized under comprehensive fixed pitch and non-ducted propeller from an early analysis and experiment by the inventor.
Hydrofoil is the sectional part of the chord of marine propeller blade that is used to examine the hydrodynamic flows. The design of hydrofoil section allows formation of the whole propeller blade. Then, the sectional hydrofoil analysis enables the design to be carried out in a much precise way and information of the whole hydrodynamic profile can be related by examining the concentration area of force loading (Schmode et al., 2012).
The foundation of hydrofoil actually comes from the development of aerofoil which was an earlier reference in patterning and analyzing of the marine propeller production (Hoerner, 1955). Aerofoil has the same foil shape as it runs along the blade reference line but hydrofoil shapes are twisted as it moves from hub to tip. Basic hydrofoil was generated according to the shape, referring to the standard of the National Advisory Committee for Aeronautics (NACA) which is the National Aeronautics and Space Administration (NASA) today.
PRELIMINARY DESIGN
Preliminary design of the marine propeller includes important parameters such as propeller geometries, environmental effect and operating parameter must be considered before analysis.
Propeller geometries: A standard screw propeller design consists of number of blades which are attached to the hub as showed in Fig. 1. The hub of the propeller is fitted with tapered propeller shaft for tight connection and then jointed with the propulsion mechanical system. Upon the applied torque or power generated, rotational motion will push the water backward and the ship forward to generate thrust force.
The diameter of a propeller can be measured by doubling the distance from center of hub to tip. Size of the propeller diameter allows the operator to access the require torque and thrust of the propulsion system. Another measurement is the pitch which particularly denotes the theoretical or ideal travel distance in a complete revolution of the propeller. The governing point to form the pitch over the surface of the rotating cylinder volume as it rotates will form a helix line which can be determined by Eq. 1, 2 and 3; the pitch angle can greatly affect the displacement of each rotational:
| (1) |
| (2) |
| (3) |
In order to determine the pitch angle of the propeller geometry, the distance moves forward by the helical angle of the propeller revolution is defined by Eq. 4:
| (4) |
 | |
| Fig. 1: | Wireframe modeling of propeller geometries |
 | |
| Fig. 2: | Pitch lines of 2D hydrofoil section |
To thoroughly understand the attack angle for drag and lift force which acts on the propeller blade surface in propeller design, one shall need to be familiar with the standard pitch lines as showed in Fig. 2.
Pitch lines is associated with the hydrofoil sectional profile. For these pitch angles measurement it can be taken from the vertical axis. Zero lift or no-lift line also knows as the effective pitch line is the line that has zero lift results from the acting hydrodynamics flows. Nose tail pitch is common reference line by most manufacturers in defining the blade sections. Carlton (2007) stressed that this line has hydrodynamics significance where its section angle of attack are defined relative to the conventional aerodynamic sense.
Skew angle is an angular displacement from the shaft reference point of any blade section relative to the generator line which is measured in the plane of rotation (Ferrando et al., 2011). Simply said it is measured from the mid-chord of the propeller blade to directrix line which is both drawn from the shaft center. There are two types of propeller skew classification: balanced and biased skew design as shown in Fig. 3. Balanced skew design has intersects at least twice while biased skew design only intersects once of the directrix line with its blade references line.
Rake profile is called negative rake angle for forward inclination and vice versa for backward inclination. High rake propeller could reduce the ventilation problem and increasing bow lift but the hole shot is decreased and caused poor performance and handling problem. Propeller rake can be subdivided into two categories which are skew induced and generator rake.
 | |
| Fig. 3(a-b): | Skew design in marine propeller (front view), (a) Blanced skew and (b) Biased skew |
Generator rake is the sintersection of generator line and cylinder of radius to intersection of directrix and root section; Skew induced rake is the intersection of generator line and cylinder of radius to intersection of blade reference line and cylinder of radius. Total rake definition is displayed in Fig. 4.
Blade surface is the sectional area that overcomes high-low pressure in rotational motion. In between these two surfaces is the leading edge that cuts the water surface and trailing edge that allows water to leave. Back surface that overcomes the water pressure when propeller moves forward is called suction surface and face surface that pushes the water backward is called the pressure surface. Blade outlines are usually described as the propeller blade area in some designs which consist of projected, developed and expanded. Actual view that can be observed from the front view of propeller is the projected outline which is less interesting in most calculation and analysis. Develop outline is the actual helical based view of propeller blade in which the pitch has reduced to zero for the whole blade length.
 | |
| Fig. 4: | Definition of total rake in marine propeller blade |
For distribution of chord length and true form of propeller blade, develop outline is critical in consideration. Expanded outline is a simple analytical drawing which usually denotes by plotting the chord length at correct radial position about the directrix line. This outline, however, is most sufficient to determine the profile of most propeller blade geometry. Generally, the developed area is larger than the projected area but smaller than the expanded area outline. Equation 5 is used to estimate the develop area from the projected area outline:
| (5) |
Properties of environment: In the interaction of propulsion system and hydrodynamic, natural effect of seawater or fresh water and its properties must also be considered. In most tests, water properties and its characteristics value could influence the actual result. Seawater and fresh water both are affected by the density that reduced with the increasing of temperature. Density, however, increased with the depth from the open water surface and also salinity contain in the seawater. Salinity of seawater over the world is assumed at 3.4% of Sodium Chloride to 100% of H2O. Fresh water test is not affected by the salinity and most fluid dynamics or thermodynamics textbooks has provided the properties of water table, depicted density as decreasing with rising water temperature (Robert et al., 2004).
Temperature of water when interacting with marine propeller varies around the world with the altitude. Talley et al. (2011) expressed that the change of altitude degree affected the temperature of water which range from about 2-29°C depending on the location from high altitudes l ocation to equator. However, most countries encountered 16-30°C average temperature annually.
Viscosity is a tribological science that describes resistance of the fluid motion relative to the adjacent surface. Shear forces occur due to relative motion between different layers of fluid presence is parallel against each other. While, shear force raise up when the relative motion between each layers increase and the viscosity required in overcoming the frictional motion is higher. Propeller analysis that is related with the water viscosity and inertia force is expressed in the Reynolds number.
Weather is the natural phenomenon of earth that changes the air motion caused by interaction of atmosphere with motion of earth which arise in marine propeller analysis due to its resistance caused by air velocity and disturbances of wave effect on the sea surface. Low velocity of wind speed is not a cause to surface perturbations of the sea but high wind speed will cause high waves, low visibility, widespread damage and high rolling of the sea (Eric, 2009).
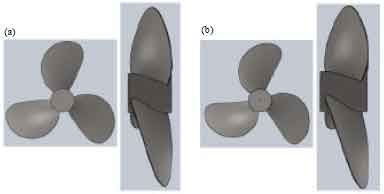
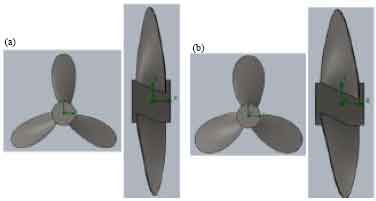
Operation parameters: Operation parameter of hydrodynamics flow analysis depends on the propeller and ship types that are being used. Referring to most common commercial propeller manufacturer in propeller geometries operating parameters, Wageningen-B or Troost marine propeller series is examined for different parameters in the computational design. For limiting the differences of blade variable, 2 to 5 blades propeller that mostly used by shipping operator was implemented. The recommended range of pitch to diameter, p/D for each propeller series were different, the most optimum ratio arises around 0.6 to 1.4 for Troost series propeller. Also, different blades width termed as Expanded Area Ratio (EAR) is being considered. The following figures, Fig. 5 to 14, are CAD drawing of marine propeller developed for different p/D ratio, rake angle, skew angle, EAR and number of blade, respectively.
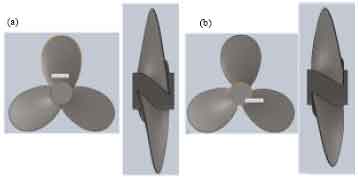 | |
| Fig. 5(a-b): | Marine propeller front view and side view CAD drawing for (a) p/D = 0.6 and (b) p/D = 0.8 |
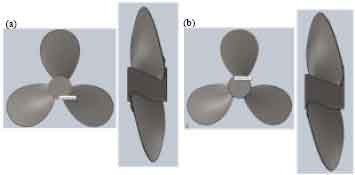 | |
| Fig. 6(a-b): | Marine propeller front view and side view CAD drawing for (a) p/D = 1.0 and (b) p/D = 1.2 |
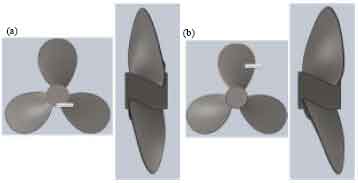 | |
| Fig. 7(a-b): | Marine propeller front view and side view CAD drawing for rake angle (a) 0° and (b) 10° |
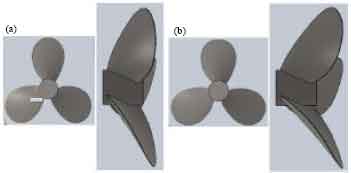 | |
| Fig. 8(a-b): | Marine propeller front view and side view CAD drawing for rake angle (a) 20° and (b) 30° |
 | |
| Fig. 9(a-b): | Marine propeller front view and side view CAD drawing for skew angle (a) 0° and (b) 10° |
 | |
| Fig. 10(a-b): | Marine propeller front view and side view CAD drawing for skew angle (a) 20° and (b) 30° |
 | |
| Fig. 11(a-b): | Marine propeller front view and side view CAD drawing for EAR (a) 0.3 and (b) 0.4 |
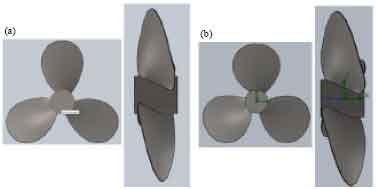 | |
| Fig. 12(a-b): | Marine propeller front view and side view CAD drawing for EAR (a) 0.5 and (b) 0.6 |
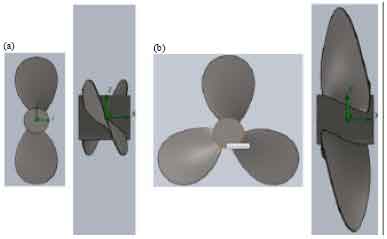 | |
| Fig. 13(a-b): | Marine propeller front view and side view CAD drawing for blade No. (a) 2 and (b) 3 |
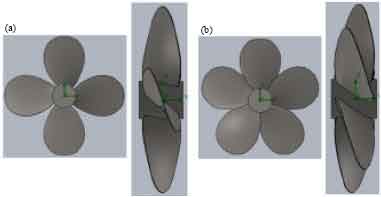 | |
| Fig. 14(a-b): | Marine propeller front view and side view CAD drawing for blade No. (a) 4 and (b) 5 |
CONCLUSION
Geometries and parameters necessary and basic for the development and investigation of marine propeller are discussed and applied via the CAD drawings of the propeller. Changes of geometries were implemented on chords profile based on the Wageningen-B or Troost series of marine propeller for slow to medium speed of movement, excellent performance and simplicity in design. The, CAD marine propellers profiles for the whole range of parameters in the Troost series propeller was developed.
ACKNOWLEDGMENT
The authors would like to express their appreciation to the Unit Kajan Bahan dan Mineral (Materials and Minerals Research Unit), School of Engineering and Information Technology, Universiti Malaysia Sabah and the Ministry of Higher Education of Malaysia for their support.
NOMENCLATURE
| X | = | X-axis |
| Y | = | Y-axis |
| Z | = | Z-axis |
| r | = | Radius of propeller |
| φ | = | Angle of rotation |
| θ | = | Helix angle |
| p | = | Pitch |
| AD | = | Develop area outline |
| AE | = | Expanded area outline |