
Khaled Halbaoui
Power Electronics Laboratory, Nuclear Research Centre of Brine CRNB, BP 180 Ain oussera 17200, Djelfa, Algeria
Touati Said
Power Electronics Laboratory, Nuclear Research Centre of Brine CRNB, BP 180 Ain oussera 17200, Djelfa, Algeria
Djamel Boukhetala
Laboratoire de Commande des Processus, ENP, 10 avenue Pasteur, Hassan Badi, BP 182 El-Harrach, Alger, Algeria
Feres Boudjema
Laboratoire de Commande des Processus, ENP, 10 avenue Pasteur, Hassan Badi, BP 182 El-Harrach, Alger, Algeria
Journal of Applied Sciences
Year: 2012 | Volume: 12 | Issue: 4 | Page No.: 381-386







ABSTRACT
Stabilizing water level of the Steam Generator (SG) in nuclear power plant is a very important problem since its parameters vary with operating conditions and dynamics of the system is very different according to the power levels and changes as time goes on. Therefore, it is an intractable as well as challenging task to improve the water level control system of the SG. In this study, a new framework for building an adaptive Minimum Variance controller for stabilizing water-level of SG is proposed. We use the recursive least squares algorithm to identify the Input/Output models. Minimum Variance Control (MVC) law is also used to develop the adaptation controller. Emphasis is put on the evaluation of the parameter identification in order to avoid instabilities because of disturbances or insufficient excitations. This is especially of importance when the adaptive control is carried out in closed loop systems and without additional test signals. The algorithm so proposed is simulated and applied to the water level control in the U-Tube Steam Generating unit (UTSG) used for electricity generation. It is shown through application to a nonlinear model of steam generators that the proposed controller has good performance.
PDF Abstract XML References Citation
Received: December 13, 2011;
Accepted: January 28, 2012;
Published: March 21, 2012
How to cite this article
Khaled Halbaoui, Touati Said, Djamel Boukhetala and Feres Boudjema, 2012. An Indirect Adaptive Controller to Regulate UTSG Water Level in Pressurized Water Nuclear Reactor. Journal of Applied Sciences, 12: 381-386.
DOI: 10.3923/jas.2012.381.386
URL: https://scialert.net/abstract/?doi=jas.2012.381.386
DOI: 10.3923/jas.2012.381.386
URL: https://scialert.net/abstract/?doi=jas.2012.381.386
INTRODUCTION
A modulation of the nuclear power plants must be able to respond to the demand on the network. The pressurized water nuclear reactor has to yield correctly a load set point (Si-Fodil et al., 2000; Khan et al., 2011). Referring to the principle of operating a nuclear power plant, securing the sufficient of its cooling source and preventing the damage of turbine blades must be done by stabilizing water level in the SG of nuclear power plant. The water level control problem of SG has been a main cause of unexpected shutdowns of nuclear power plants. Stabilizing the water level around the predetermined level is very important for the safety and efficient operation of nuclear power plants. It becomes more difficult to maintain water level at low power since the nonminimum phase effects, known as ‘swell and shrink’, become greater. This reverse dynamic effect prevents using the automated controller and forces manual operation. Even for experts in the field, however, it is not so easy to react effectively to the reverse dynamics (Kim et al., 2004).
Consequently, many researchers deploy many efforts to apply various control techniques to the water level control of steam generators (Parlos and Rais, 2000; Strohmayor, 1982) . One of them is using PID control of UTSG water level, based on model predictive technique (based on standard Irving’s model) to automatically tune the PID gains. More of them, like it is shown in the literature, use the fuzzy control technique which receives many attentions among such of advanced control techniques, due to its resemblance to human-like characteristics.
It was demonstrated through several previous works that fuzzy control technique is an interesting approach which can be successfully applied to control water level of steam generator of nuclear reactors (Choi, 1987; Munasinghe et al., 2005; Na, 2001). This last process is highly complex, nonlinear and describable only by a (not analytical) numerical model.
However, performance of fuzzy controllers strongly depends on the initial assignment of membership parameters and rule structure and so on. In order to tune such parameters, it is necessary that the designer use trial-and-error procedure.
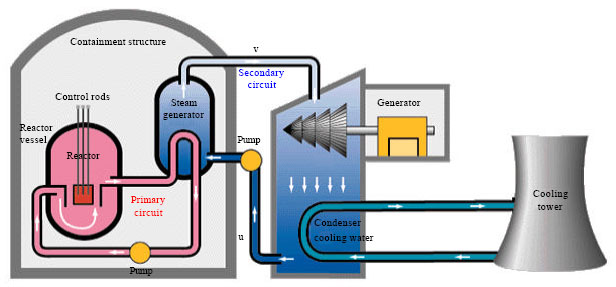 | |
| Fig. 1: | Simplest schematic of a nuclear power plant with the u-tube steam generator |
This one consists of repeating two steps: the first step is to apply current controller to the target system and the second step is to tune the controller observing the performance of the controller on the target system. To get rid of this necessity, there has been an approach to apply genetic algorithm to tune the fuzzy controller (Cho and No, 1996).
In this study, a Self-Tuning Controller (STC) is proposed. The stochastic autoregressive moving average model, ARMAX, is derived. Then the adaptive MVC is implemented to regulate UTSG water level in pressurized water nuclear reactor. The adverse phenomena which are caused due to parameters uncertainties, modelled dynamics, errors of flow rate measurements and process noise is cured by using the proposed stochastic adaptive control law.
U-tube steam generator model and problem statement: U-tube steam generator is the major component in nuclear power industry, where the steam is generated. Fig. 1 shows a simplest schematic of the overall nuclear power plant. Indeed, the heat generated at the nuclear reactor is taken away by forced-circulated water in the primary circuit. Due to the water contamination by radioactive particles, the primary circuit is therefore, isolated from the rest of the system. Referring to the figure, the primary circuit has an inverted u-tube bundle submerged in the water column of the steam generator, where the heat transfer takes place from primary circuit to secondary circuit that makes secondary circuit water reach the state of bulk-boiling. The generated steam of the secondary circuit is sent to the turbine which is coupled to an armature to generate electricity to be injected in the grid.
The philosophy of the control is that the water level control of the UTSG should be maintained within its lower and upper limits, like it is shown in Fig. 1. If unfortunately, the controller is not able to maintain water level at the desired level, it would lead to the following serious consequences including unintended plant shutdowns and also system damage (Parlos and Rais, 2000).
In the case, where low water level exposes the u-tubes, the heat transfer from the primary circuit to the secondary circuit will not take place efficiently. Consequently, primary circuit builds up heat within itself, which causes the reactor to trip off.
In either case, where the water level rises too high, the steam will contain more moisture (dryness). And the wet steam may damage the turbine blades; therefore, turbine trips off.
Therefore, it is extremely important that the water level of the UTSG should be regulated within its limits. Significant percentage of plant shutdowns and system unavailability at present, are reportedly due to failures in UTSG water level control. The last one is a very difficult problem as its dynamics shows high non-linearity and nonminimum phase behavior. It can be approximated by the following linearized model taking account a given power level (Kothare et al., 2000):
| (1) |
Where:
| p | = | Power level (%) |
| u | = | Feed water flow (kg sec-1) |
| v | = | Steam flow (kg sec-1) |
| y | = | Water level (mm) |
| r | = | Reference water level (mm) |
| el | = | r-y=Level error (mm) |
| el | = | v-u p=Flow error (kg sec-1) |
| vp | = | Rated steam flow at power (kg sec-1) |
| Table 1: | UTSG model parameters |
 | |
The four terms on the Right Hand Side (RHS) are, respectively in that order mass capacity effect, nonminimum phase effect of feed-water, nonminimum phase effects of steam and the effect of mechanical oscillation. For an ideal plant, Table 1 gives the model parameters of Eq. 1, i.e., {G1, G2, G3, G4, τ1, τ2, τ3, T} originally published by Irving (Munasinghe et al., 2005). Figure 2 graphically illustrates UTSG dynamics given in Eq. 1, in the case, when the plant operates at 50% of its rated power.
Figure 2c and d show the reverse dynamics due to feed-water change and steam flow change, respectively. We propose some assumptions which are helpful to simplify UTSG modeling, however, at an expense of loosing credibility to represent actual plants; the two reverse dynamics have been assumed identical (except for sign) in Na (2001). In Na (2001) and Zheng (2004), the mechanical oscillation effect (Fig. 2e) has been neglected.
However, in this study, we consider mechanical oscillation effect as well as nonidentical reverse dynamics for steam and feed-water, therefore, to make the model more accurate in representing actual UTSG plants.
We consider that the UTSG water level control is inherently, a very difficult problem due to the following two particular reasons (Parlos and Rais, 2000).
The nonminimum phase dynamics (known as “swell” and “shrink” in UTSG literature): Indeed, a temporary increase in water level in response to a reduction of liquid water mass in the steam generator is referred to “Swelling” behaviour. It is momentarily observed when steam flow rate undergoes a sudden increment (v→v+δv) (Fig. 2a, d) or feed-water flow rate undergoes a sudden drop (u→u+δu). On the other hand, Fig. 2a and c illustrate the “shrinking” behaviour which is the exact opposite of “swelling”. It refers to a temporary decrease in the water level, against an increase of the liquid water mass in the steam generator.
 | |
| Fig. 2(a-f): | UTSG dynamics at 50% of the rated power. All graphs show the deviation form its steady state value at the specified power level. Plant excitations in 1 u = 1 v = 6.6 (kg sec-1) is 1% of the plant flow rates at 50% rated power |
In fact, these behaviours, though they last momentarily, are in exact opposition of the response, one would expect upon the nature of steam or feed-water flow changes introduced to the system. We conclude that these reverse behaviours make it very difficult to regulate the water level of the UTSG in pressurized water nuclear reactor.
Errors of flow rate measurements: Steam flow rate and feed-water flow rate are considered the most critical and widely used feedback signals. They are not accurate enough during start-up transients in the more often cases and at low power operations. Under these conditions, feedback signals as flow rates are small in magnitude and corrupt the process noise beyond the limit of being useful.
Minimum variance controller: Since the characteristics of UTSG vary with time, in this study, the Self-Tuning Controller (STC) is used to design the adaptive controller. The self-tuning controller is suitable for controlling the time-varying plant and unknown plant.
The block diagram of UTSG control system based on STC is shown in Fig. 3. The UTSG controller is composed of the self-tuning controller and the parameter identifier. y(k) is water level, ym(k) is set-point and μ(k) is control input.
The controller and the identifier are designed assuming the following ARMAX model (Zheng, 2004; Huang et al., 2005):
| (2) |
where e(k) is white noise, q-d u(k) denotes control delay (d≥1) and q-1 is backward shift operator with one sampling period, viz., q-1.y(k) = y(k-1), A(q-1) = 1+a1.q-1+...+an.q-n, a1,...an are parameters of the Autoregressive (AR) part, is the AR order, B(q-1) = b0+b1q-1+...+bm.q-m, bo ... bm are the parameters of the exogenous (X ) input part, m is the input order, c(q-1) = 1+c1.q-1 +...+ cn.q-n c1...cn are parameters of the moving average (MA) part and n is the MA order.
The adaptive controller using STC is designed with the generalized MVC law. The control input μ(k) based on the generalized MVC law is selected to minimize the following J(k) cost function (Clarke, 1984; Grimble, 1981):
| (3) |
where, E[] is the expectation operator, λo is the control weighting that is introduced to control non-minimum phase systems.
The control input μ(k) to minimize the cost function J(k) is obtained by the following manipulations. The following Diophantine’s equation uniquely determines the polynomial F(q-1) and G(q-1) if the polynomial is given by Bezout identity:
 | (4) |
Equation 4 is rewritten multiplying y(k) to both side in Eq. 4 and using Eq. 2 as:
| (5) |
Equation 5 represents the non-minimum phase realization of Eq. 2.
 | |
| Fig. 3: | General view of the proposed control system |
The control input u(k) to J(k) minimize is obtained, taking account ∂y(k+d)/∂u(k) = b0 of by using. ∂J(k)/∂u(k) = 0:
 | (6) |
Equation 6 determines the control input u(k) based on the generalized MVC law.
Recursive least square estimation: The controller must know the UTSG parameters to calculate the control input u(k). There are many parameter identification algorithms and approaches for realizing adaptive control (Jha et al., 2011; Naeimi et al., 2009; Halbaoui et al., 2009). This study adopts the recursively least square method for parameter identification for the sake of simplification of the parameter identification algorithm.
The parameter identification based on the recursively least square method for unknown plant is to find the parameter vector to minimize the following cost function J(k) (Landau, 1993):
| (7) |
where,
The identification algorithm of the recursively least square method is finally obtained by calculating ∂J/∂θ = 0. The identified parameter vector θ is obtained by:
| (8) |
 | |
| Fig. 4(a-d): | Simulation under MVC control. During first 31000 sec, the operator changes randomly the reference level within 80-120 mm. Random disturbances are introduced in the steam flow at all times. The time interval between consecutive disturbances is 200 sec and between consecutive reference changes is 300 sec. The magnitude and sign of disturbances and reference changes are also randomly determined |
 | (9) |
| (10) |
Equation 8, 9 and 10 are the identification algorithm of the recursively least square method.
Application to the steam generator water level control: Using the MVC proposed algorithm, a prolonged simulation of the UTSG plant was carried and the results are shown in Fig. 4. Starting from the beginning of the simulation, the reference water level was intentionally changed in 5 mm steps in every 300 sec intervals, over the entire range of 100, 120, 80 and 100 mm, which takes 10000 sec in total. Then, another 2 h was given for random reference changes.
The total duration of one simulation epoch is, therefore, 31000 sec.
CONCLUSION
In this study, an adaptive controller was developed to control the water level of nuclear steam generators. The developed controller was applied to the linear ARMAX models for nuclear steam generators. The steam generator water level controller was designed to effectively cope with water level deviation and steam flow disturbance and especially, computer simulations were conducted to investigate the output tracking performance.
REFERENCES
- Huang, C.M., C.J. Huang and M.L. Wang, 2005. A particle swarm optimization to identifying the ARMAX model for short-term load forecasting. IEEE Trans. Power Syst., 20: 1126-1133.
CrossRef - Cho, B.H. and H.C. No, 1996. Desin of stability-guaranteed fuzzy logic controller for nuclear steam generators. IEEE Trans. Nucl. Sci., 43: 716-730.
CrossRef - Clarke, D.W., 1984. Self-Tuning control of nonminimum-phase systems. Automatica, 20: 501-517.
CrossRef - Grimble, M.J., 1981. A control weighted minimum-variance controller for non-minimum phase systems. Int. J. Control., 33: 751-762.
CrossRef - Halbaoui, K., D. Boukhetala and F. Boudjema, 2009. Speed control of induction motor drives using a new robust hybrid model reference adaptive controller. J. Applied Sci., 9: 2753-2761.
CrossRefDirect Link - Khan, S.U.D., M. Peng and M. Zubair, 2011. Study on the evaluation and simulation of steady state behavior and reactor safety concept for integral pressurized water reactor. Inform. Technol. J., 10: 983-991.
CrossRefDirect Link - Kothare, M.V., B. Mettler, M. Morari, P. Bendotti and C.M. Falinower, 2000. Level control in the steam generator of a nuclear power plant. IEEE Trans. Control Syst. Technol., 8: 55-69.
CrossRef - Kim, M.S., C.H. Kim, M. Rohan and J.J. Lee, 2004. Evolutionary optimization of fuzzy systems for water level control in the steam generator of nuclear power plant. IEEE Int. Conf Syst. Man Cybern., 3: 2303-2308.
CrossRef - Na, M.G., 2001. Auto-tuned PID controller using a model predictive control method for the steam generator water level. IEEE Trans. Nucl. Sci., 48: 1664-1671.
CrossRef - Naeimi, M., M. Teshnehlab, M. Aliyari Sh and M. Aliasghary, 2009. Stable direct adaptive control as nonlinear hybrid controller for flexible manipulator. J. Applied Sci., 9: 1258-1266.
CrossRefDirect Link - Jha, N., U. Singh, T.K. Saxena and A. Kapoor, 2011. Optimal design of neural fuzzy inference network for temperature controller. J. Applied Sci., 11: 2754-2763.
CrossRef - Parlos, A.G. and O.T. Rais, 2000. Nonlinear control of U-tube steam generators via H control. Control Eng. Pract., 8: 921-936.
CrossRef - Si-Fodil, M., P. Siarry, F. Guely and J.L. Tyran, 2000. A fuzzy rule base for the improved control of a pressurized water nuclear reactor. IEEE Trans. Fuzzy Syst., 8: 1-10.
CrossRef - Munasinghe, S.R., M.S. Kim and J.J. Lee, 2005. Adaptive neurofuzzy controller to regulate UTSG water level in nuclear power plants. IEEE Trans. Nuclear Sci., 52: 421-429.
CrossRef - Zheng, W.X., 2004. A revisit to least-squares parameter estimation of ARMAX systems. IEEE Conf. Decis. Control, 4: 3587-3592.
CrossRef