
Ali Dorostghol
Department of Mechanical Engineering, Behbahan Branch, Islamic Azad University, Behbahan, Iran
Masoud Dorfeshan
Department of Mechanical Engineering, Khatam Al Anbiya University of Technology, Behbahan, Iran
Journal of Applied Sciences
Year: 2012 | Volume: 12 | Issue: 18 | Page No.: 1960-1965







ABSTRACT
In the first stage of failure, the vibrations of gearboxes have a low range, which are often covered with stronger vibrations of the system. Thus, diagnosing the faults of the gears of the gearbox is difficult among the vibrations of other parts of the machine. In this regard, varied mathematical methods have been used, each having its own potentials and shortcomings. Fast Fourier Transforms (FFT) and Short-Time Fourier Transform (STFT) are two of these methods. However, due to the wide range of gearbox faults, distinguishing these faults is not possible via the aforementioned methods. So, with regard to the capability of empirical model decomposition EMD method in distinguishing faults, this study investigates the gearboxes vibration signals practically and in laboratory. First some intentional faults are applied on the experimental gearboxes. Then, the group of vibration signals of varied faults is collected and the data collected from the practical test are analyzed. Finally, a neural network was offered for an intelligent fault diagnosis of the gearbox. The findings verified the suggested methods (computing standard deviation and root-mean-square) not only are accurate enough but also have reduced the size of computations to a great extent.
PDF Abstract XML References Citation
Received: May 03, 2012;
Accepted: August 25, 2012;
Published: September 08, 2012
How to cite this article
Ali Dorostghol and Masoud Dorfeshan, 2012. Intelligent Fault Diagnosis via EMD Method. Journal of Applied Sciences, 12: 1960-1965.
DOI: 10.3923/jas.2012.1960.1965
URL: https://scialert.net/abstract/?doi=jas.2012.1960.1965
DOI: 10.3923/jas.2012.1960.1965
URL: https://scialert.net/abstract/?doi=jas.2012.1960.1965
INTRODUCTION
Precise and on time diagnosis of the faults leads to a good outcome, profitable maintenance and repair methods for industrial units. This can be done by using accurate and practical scientific methods in the form of advanced machines for condition monitoring, as well as using specialists familiar to the relevant sciences and technologies. Since the mid 1950s, the measurement and analysis of the vibrations is known as the major technique in controlling the machineries’ condition while working. Each mechanical fault causes vibrations with certain features. Therefore, by measuring vibrations and considering their features, we can diagnose the relevant mechanical fault. So, special sensors are used for measuring the vibrations of the machine and these measurements are recorded (Shen et al., 2012).
The main problem in analyzing the vibrations of the system is transforming the recorded raw signal to analyzable data for the operator. This transformation which is done via mathematical relations should (Wowk, 2000) have the ability to show any point relevant to the signal one by one and eliminate irrelevant data. In this regard, varied mathematical methods with different potentials and shortcomings are used. These method could be categorized into two main group: classic signal processing (McFadden and Smith, 1984) and intelligent systems for example FFT, Wigner-Ville distribution (Baydar and Ball, 2001), wavelet (Newland, 1994; Wang and Gao, 2003), Hilbert-Huang transform (Peng and Chu, 2004), blind source separation (Tse et al., 2006), statistical signal analysis (Jardine et al., 2006) and their combinations (Fan and Zuo, 2006; Farina et al., 2008) are classic signal processing methods. ANN-based (Paya et al., 1997), GA-based (Samanta, 2004), expert systems (Ebersbach and Peng, 2008), combined algorithms (Rafiee and Tse, 2009; Rafiee et al., 2007, 2009) and EMD (Yang and Tavner, 2009) could be classified as intelligent systems. Currently, industrial applications of intelligent monitoring systems have been increased by the progress of intelligent systems. In recent years, many researchers have used EMD methods due to the inefficiency of the aforementioned methods in precise and on time diagnosis of some faults and also the effects of gear faults on vibration frequencies and so making local changes and making the signals unstable. In this respect, Parey activities (Parey et al., 2006) were done in gear modeling in order to identify faults at the initial stages of the growth via EMD method. Loutridis was the first person who used EMD method in gearbox fault diagnosis with varied cracks in the gear. However, he failed at making an intelligent system (Loutridis, 2004). Yang and Tavner (2009) investigated shaft vibration signals via EMD method (Yang and Tavner, 2009). Lei et al. (2009), used a method known as optimized EMD for fault diagnosis; a method which was complex and consisted of more computations compared with EMD method (Lei et al., 2009).The main problem in EMD method is its complexity and so needing much experience and insight in physics issues in diagnosing faults. Thus, one of the major challenges in EMD method is having systematic intelligence for intelligent fault diagnosis. In order to solve this problem, Ricci and Pennacchi (2011) aimed at making intelligent choices of optimized Intrinsic Mode Functions (IMFs) for fault diagnosis but their method was restricted to certain faults and lacked a thorough intelligent method for fault diagnosis. So, this project aims at creating an intelligent neural network based on EMD method.
DATA RECORDING
In this study, in order to collect experimental data, a four-speed motorcycle gearbox, a single phase electric motor with 380 w power and nominal speed of 1420 RPM, a multichannel pulse analyzer system, a triaxial accelerometer, an optical tachometer and a coupling for connecting the internal and external shaft of the gearbox and four rubber shock absorber under the system for hindering sudden vibrations are used (Fig. 1).
To have faults on the gears, a 29 teeth gear in the fourth gear is used on the internal shaft. In contact, this gear has the highest circular speed (Fig. 2).
In Fig. 2, A and B indicate the shaft A and shaft B. Gears A4 and B4 are a pair of driving and driven gears. Gears A2 and A4 mounted on the output shaft and B1 and B3 mounted on the input shaft were fixed in the gearbox and N indicates the number of teeth.
Figure 3 shows the faults of slight-worn, broken teeth of the gear and accelerometer location.
Moreover, Fig. 4 and 5 show the vibration signal in the gear with slight worn and medium worn, respectively. The vertical axis shows just relative displacement and has no defined unit.
Figure 6 and 7 indicate the FFT analysis of these faults. As shown, faults cannot be diagnosed via Fig. 6 and 7. In these two diagrams the vertical axis also shows the relative numbers.
 | |
| Fig. 1: | Data recording |
 | |
| Fig. 2: | Schematic diagram of the gearbox |
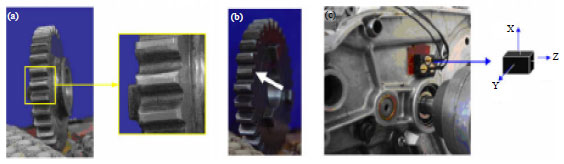 | |
| Fig. 3(a-c): | (a) Slight worn gear, (b) Broken teeth and (c) Accelerometer location |
 | |
| Fig. 4: | The slight-worn vibrational signal |
 | |
| Fig. 5: | The medium-worn vibrational signal |
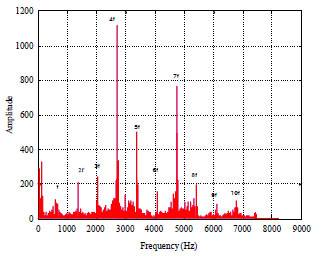 | |
| Fig. 6: | The slight-worn FFT diagram |
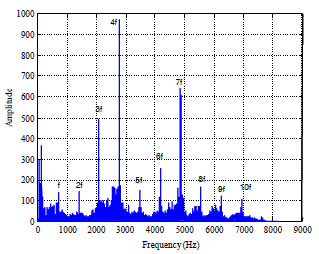 | |
| Fig. 7: | The medium-worn FFT diagram |
EMD METHOD
In EMD method, it is hypothesized that each signal consists of varied simple sine curves (2). Therefore, each signal can be decomposed into a few waves or so called IMFs. In order to have IMFs, the following stages should be done (Yang and Tavner, 2009):
| • | Identifying all the maximum and minimum local points of the signal |
| • | All maximum points should be linked together via a grade 3 spline. The same should be done for all minimum points |
| • | After computing the average size of maximum and minimum spline, it is defined as m1 and its difference with the quantity of the main input signal relevant to vibrations (x (t)) is called h1: |
| (1) |
where, h1 is the first element to be investigated with regard to whether it is IMF or not? For this reason, two terms should be checked (Huang et al., 1998; Loutridis, 2004):
| • | In all data, the number of zeros and extrema of the signals should at most differ by one number |
| • | The average size of local range of the maximum and minimum in each part of the signal should be the same |
If h1 is not part of IMFs, h1 behaves as a basic signal and the aforesaid stages should be done again. These stages repeat until h1 becomes an IMF. The first part of IMF which can be obtained from the data separates from the base signal and the remaining signal acts as a base signal.
HILBERT TRANSFORM ALGORITHM
Each IMF consists of a wave with a certain frequency range. The first IMF is a wave having the highest frequency available in the primary signal. Other IMFs consist of waves with the lowest frequency in the primary signal (Parey et al., 2006). The main objective of Hilbert transform of signal Cj (t) is described as follows (Loutridis, 2004):
| (2) |
After Hilbert transform, the frequencies in each IMF can be obtained via relations Eq. 3:
| (3) |
and
| (4) |
In the presence of fault frequency in each IMF, the fault can be detected. The diagram of the six first IMFs gained of an average fault signal is shown in Fig. 8. In this Fig. 8 also the vertical axis shows the relative displacement.
CREATING A NEURAL NETWORK
Neural networks which are mainly derived from the human nervous system have been widely used as a kind of intelligent system in recent decades. Learning potential, flexibility and interoperability are features which make neural networks appropriate for scientific and engineering problems.
  | |
| Fig. 8(a-f): | The six first IMFs of medium-worn signal, (a) The first IMFs of medium-worn signal, (b) The second IMFs of medium-worn signal, (c) The third IMFs of medium-worn signal, (d) The forth IMFs of medium-worn signal, (e) The first fifth of medium-worn signal and (f) The first sixth of medium-worn signal |
| Table 1: | Comparing the standard deviation (SD) and the root mean square (RMS) |
 | |
| Table 2: | The results of testing the neural network via standard deviation (SD) and the root-mean-square (RMS) |
 | |
To diagnose faults, in this study first each signal is decomposed into several sub-signals via EMD method in the MATLAB programming software. Then, standard deviation and the root mean square of the first six signals are computed (Table 1) at different stages and used as the input of the neural network in different networks. Therefore, the toolbox of the neural network in the MATLAB software is used. The network used has a two-layered perception structure with error back propagation as its learning algorithm and Sigmoid function as transfer function for all layers.
The data collected from 100 revolutions of vibration signal in each group of gearbox fault was used to teach the network. Then, in order to investigate the performance of the network in each fault, 100 vibration signals are tested. Table 2 shows the results of testing the neural network via standard deviation and the root-mean-square, respectively.
CONCLUSION
In this study, a neural network is offered for fault diagnosis via EMD method which has less input compared with wavelet analysis method. Besides, the method suggested in this study is more accurate and provides precise answers in all cases. Thus, both suggested methods (computing standard deviation and root-mean-square) not only are accurate enough but also have reduced the size of computations to a great extent.
REFERENCES
- Shen, Z., X. Chen, X. Zhang and Z. He, 2012. A novel intelligent gear fault diagnosis model based on EMD and multi-class TSVM. Measurement, 45: 30-40.
CrossRef - McFadden, P.D. and J.D. Smith, 1984. Vibration monitoring of rolling element bearings by the high-frequency resonance technique: A review. Tribol. Int., 17: 3-10.
CrossRef - Paya, B.A., I.I. Esat and M.N.M. Badi, 1997. Artificial neural network based fault diagnostics of rotating machinery using wavelet transforms as a preprocessor. Mech. Syst. Signal Proc., 11: 751-765.
CrossRef - Baydar, N. and A. Ball, 2001. A comparative study of acoustic and vibration signals in detection of gear failures using Wigner-Ville distribution. Mechanical Syst. Signal Proces., 15: 1091-1107.
CrossRef - Wang, C. and R.X. Gao, 2003. Wavelet transform with spectral post-processing for enhanced feature extraction. IEEE Trans. Instrumentation Measur., 52: 1296-1301.
Direct Link - Peng, Z.K. and F.L. Chu, 2004. Application of the wavelet transform in machine condition monitoring and fault diagnostics: A review with bibliography. Mech. Syst. Signal Process., 18: 199-221.
CrossRefDirect Link - Tse, P.W., J.Y. Zhang and X.J. Wang, 2006. Blind source separation and blind equalization algorithms for mechanical signal separation and identification. J. Vibration Control, 12: 395-423.
CrossRef - Jardine, A.K.S., D. Lin and D. Banjevic, 2006. A review on machinery diagnostics and prognostics implementing condition-based maintenance. Mech. Syst. Signal Proc., 20: 1483-1510.
CrossRef - Fan, X. and M.J. Zuo, 2006. Gearbox fault detection using Hilbert and wavelet packet transform. Mechanical Syst. Signal Proces., 20: 966-982.
CrossRef - Farina, D., M.F. Lucas and C. Doncarli, 2008. Optimized wavelets for blind separation of non stationary surface myoelectric signals. IEEE Trans. Biomed. Eng., 55: 78-86.
PubMed - Samanta, B., 2004. Gear fault detection using artificial neural networks and support vector machines with genetic algorithms. Mechanical Syst. Signal Proces., 18: 625-644.
CrossRef - Ebersbach, S. and Z. Peng, 2008. Expert system development for vibration analysis in machine condition monitoring. Expert Syst. Applicat. Int. J., 34: 291-299.
CrossRef - Rafiee, J. and P.W. Tse, 2009. Use of autocorrelation of wavelet coefficients for fault diagnosis. Mechanical Syst. Signal Proces., 23: 1554-1572.
CrossRef - Rafiee, J., F. Arvani, A. Harifi and M.H. Sadeghi, 2007. Intelligent condition monitoring of a gearbox using artificial neural network. Mech. Syst. Signal Proc., 21: 1746-1754.
CrossRef - Rafiee, J., P.W. Tse, A. Harifi and M.H. Sadeghi, 2009. A novel technique for selecting mother wavelet function using an intelligent fault diagnosis system. Expert Syst. Appl., 36: 4862-4875.
Direct Link - Yang, W. and P.J. Tavner, 2009. Empirical mode decomposition, an adaptive approach for interpreting shaft vibratory signals of large rotating machinery. J. Sound Vibrat., 321: 1144-1170.
Direct Link - Parey, A., M. El Badaoui, F. Guillet and N. Tandon, 2006. Dynamic modeling of spur gear pair and application of empirical mode decomposition-based statistical analysis for early detection of localized tooth defect. J. Sound Vibr., 294: 547-561.
CrossRef - Loutridis, S.J., 2004. Damage detection in gear systems using empirical model decomposition. Eng. Struct., 26: 1833-1841.
CrossRef - Ricci, R. and P. Pennacchi, 2011. Diagnostics of gear faults based on emd and automatic selection of intrinsic mode functions. Mechanical Syst. Signal Proces., 25: 821-838.
CrossRef - Huang, N.E., Z. Shen, S.R. Long, M.C. Wu and H.H. Shih et al., 1998. The empirical mode decomposition and the hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. London A, 454: 903-995.
CrossRefDirect Link