
Edwar Yazid
Department of Mechanical Engineering, Universiti of Teknologi PETRONAS, Bandar Seri Iskandar, 31750 Tronoh, Perak, Malaysia
Setyamartana Parman
Department of Mechanical Engineering, Universiti of Teknologi PETRONAS, Bandar Seri Iskandar, 31750 Tronoh, Perak, Malaysia
Khairul Fuad
Department of Mechanical Engineering, Universiti of Teknologi PETRONAS, Bandar Seri Iskandar, 31750 Tronoh, Perak, Malaysia
Journal of Applied Sciences
Year: 2011 | Volume: 11 | Issue: 10 | Page No.: 1716-1724







ABSTRACT
In this paper, dynamic behavior of non-slewing-luffing crane type, namely gantry crane is investigated by introducing the flexibility of crane framework and hoist cable. The dynamic model of such system is obtained by modeling crane framework using finite element method and gantry crane system by using Lagranges equations. The equations of motion constitute nonlinear coupling terms between crane framework and crane system. The coupled dynamic equations are solved numerically using a combinational direct integration technique, namely Newmark-β and fourth-order Runge-Kutta method. Numerical simulations are carried out to obtain the open-loop responses as functions of limited set parameters for quite simple but representative for gantry crane system.
PDF Abstract XML References Citation
Received: October 22, 2010;
Accepted: November 01, 2010;
Published: April 18, 2011
How to cite this article
Edwar Yazid, Setyamartana Parman and Khairul Fuad, 2011. Open-Loop Responses of Flexible Gantry Crane System. Journal of Applied Sciences, 11: 1716-1724.
DOI: 10.3923/jas.2011.1716.1724
URL: https://scialert.net/abstract/?doi=jas.2011.1716.1724
DOI: 10.3923/jas.2011.1716.1724
URL: https://scialert.net/abstract/?doi=jas.2011.1716.1724
INTRODUCTION
The vibrational motion induced by the moving carriage hoisted an object is one of important vibration problems in variety of engineering systems. Such systems may be found in crane system such as overhead cranes, gantry cranes, rotary cranes and other types of crane. An example of a crane system which is most widely used in factories, warehouse, shipping yards and nuclear facilities is non-slewing-luffing crane type, namely gantry crane system. Gantry crane is usually designed to have very strong structures and big dimension in order to lift and transfer heavy payloads.
However, the lifting capacities heavier and the size of cranes have increased continuously due to the increase of productivity and capacity. This condition leads to the consequence that the elastic deformability of all elements of the system cannot be neglected (Ren et al., 2008; Bhimani, 1999). The presence of elastic deformability will induce the unwanted vibration when it is subjected to dynamic loads. It may cause issues related with safety of crane system and its framework, operators and surrounding environment.
Moving load as a total weight of trolley, lift system and lifted load according to (Bhimani, 1999) is taken as a moving subsystem, then this moving subsystem which is accompanied by swinging payload will induce the crane framework and conversely. They will create bidirectional dynamic interaction as reported by (Oguamanam et al., 2001) and constitute nonlinear coupling terms between crane system and crane framework, affecting the motion of gantry crane system. This dynamic characteristic cannot be described by classical model of pendulum system with moving pivot point. Flexible gantry crane, unlike their counterpart namely rigid gantry crane, has not received much attention. The published papers and conferences relate with this case are limited. Some cited references can be referred in (Oguamanam et al., 2001; Yang et al., 2007; Zrnic et al., 2006; Mitrev, 2007). Among those references, (Wu, 2004) has studied such a case by introducing the concept of equivalent moving mass matrix, but the dynamics of payload was not introduced in his work, restricted to planar swing and rigid cable. He also concerned only in dynamic responses of crane framework.
The aim of this paper is to generate the equations of motion of three-dimensional gantry crane system by introducing the flexibility of crane framework and hoist cable into the model. Computational technique for solving the coupled equations of motion is proposed by which allow us to investigate the bidirectional dynamic interaction between the gantry crane and crane framework.
MATERIALS AND METHODS
Gantry crane system can be divided into two subsystems, namely gantry crane and stationary crane framework. In practice, gantry crane incorporates the interaction among trolley, hoist cable and payload under trolley and hoist mechanism. The payload is attached using hook system, hoisted from the trolley through hoist cable. For simplicity of the characteristics of the physical gantry crane, several assumptions are put forward to the proposed dynamical model. The mass of trolley and payload are modeled as lumped mass which is connected by an elastic cable. Figure 1 explained Payload and cable behave as an elastic pendulum system. The payload has two swing angles with respect to the inference frame: is denoted as angle between the XT-axis and XT YT plane, while notation φ is the angle between the cable to XT YT-plane as defined by Fig. 2. The payload swings either small or large swing angles. Dynamics of hoist drive mechanism is not considered.
Dynamics of swinging motion of payload on flexible crane framework: The equations of motion of swinging motion of payload on flexible crane framework can be derived by Lagranges equations, with the following form.
 | (1) |
The first three terms of q = (uT,vT,wT,xT,θ,φ,δ) are defined as the generalized coordinates to describe the elastic deformations of crane framework and the rest is trolley, payload and hoist cable motion. General velocity of the system is denoted by ![]() , where it is time derivative q. The position vector of trolley rT and payload rP as in Fig. 1 can be expressed as:
, where it is time derivative q. The position vector of trolley rT and payload rP as in Fig. 1 can be expressed as:
| (2a) |
 | (2b) |
where, I, j and k are unit vectors along the -x-, y- and z-axis, respectively. For convenience, elastic displacements in Eq. 2a-2b can be expressed in following terms.
 | (3) |
The term xT is position of trolley carrying a swinging payload at central point cP of the top beam of crane framework which is time-invariant. Referring to Eq. 2, the flexibility of crane framework (uT, vT, wT) and hoist cable δ is considered in the position vector of trolley and payload.
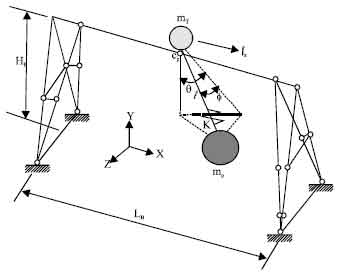 | |
| Fig. 1: | Finite element model of flexible gantry crane system |
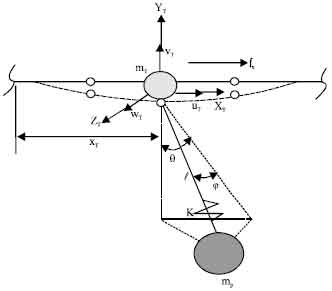 | |
| Fig. 2: | Elastic deformation of crane framework and hoist cable |
The flexibility of hoist cable is modeled as one linear spring with stretched length ![]() . This is sufficient approach since the cable is assumed to be in tension during normal crane operation (Masoud, 2009). The linear spring force of hoist cable can be expressed as:
. This is sufficient approach since the cable is assumed to be in tension during normal crane operation (Masoud, 2009). The linear spring force of hoist cable can be expressed as:
| (4) |
It is noted that notation k is cable stiffness, while ![]() is unstreched hoist cable. The Lagrangian L is defined as L = k–P, where k is kinetics energy and P is potential energy of the system. Generalized force is denoted as fI, where they are fx, fy and fz, applied input force
is unstreched hoist cable. The Lagrangian L is defined as L = k–P, where k is kinetics energy and P is potential energy of the system. Generalized force is denoted as fI, where they are fx, fy and fz, applied input force
for the x, y and z motions respectively. Kinetics energy of the system is the kinetics energy of the trolley and the payload, defined as:
| (5a) |
The total potential energy of the system P is the potential energy of the trolley, payload and cable as follows:
 | (5b) |
By deriving L with respect to generalized coordinates and considering that the structural members flexibility (uT, vT, wT)are based on position xT and time t, then
 | (6) |
The equation motions of the system can be derived and summarized as Eq. 7a-7d and the right side of Eq.13a.
 | (7a) |
 | (7b) |
 | (7c) |
 | (7d) |
Dynamics of crane framework: The crane framework model is established by the finite element method by introducing the global mass, damping and stiffness matrices of the crane framework. Based on the finite element discretization, the equation of motion for MDoF structural system, geometrically and materially linear dynamic is represented as follows:
| (8) |
where, [Mst], [Cst], [KSt] are the mass, damping and stiffness matrices of the crane framework, respectively. Terms {qSt(t)},{qSt(t)},{qSt(t)} are the acceleration, velocity and displacement vectors for the whole framework, respectively. Due to the trolley traverses along the top beam of crane framework, and assumed that the moving trolley carrying a swinging payload is always in contact with the framework girder, there will be transmitted force to the framework from the swinging payload through the cable and contact force at contact point between the trolley and the crane framework. This is exciting forces for the crane framework and noted as {FSt(t)}. In order to tackle the position and time variant,{FSt(t)} in Eq. 8 is modified as below:
| (9) |
Term f0 is external force vector acting on the framework girder, which can be written in the following form:
| (10) |
where, f0x, f0y and f0Z are the corresponding external force components in the x, y and z direction. The magnitude of these external forces is given by Eq.13a.
Due to finite element model of crane framework using space frame element, term NK(k = 1–12) is the shape functions of space frame element, as well. External force vector in Eq. 9 can be rewritten in the following form.
| (11) |
It is noted that terms {NK}u u = k = 1,7, {NK}v v = k = 2,6,8,12 and {NK}w w = k =3,5,9,11 are shape
functions associated with degree of freedoms in three directions axial (x), vertical (y) and lateral (z). According to the concept of equivalent node forces, Eq. 11 can be presented in Fig. 3.
The notation fSK is the equivalent nodal forces and uSK is the displacements for nodes where sk(k 1–12) are the numberings for the twelve degrees of freedom of the one space frame element on which the trolley located.
For more detail about concept of equivalent node forces, it can be referred to (Wu, 2004). The axial (x), vertical (y) and lateral (z) displacement of space frame element at position x, can be obtained as below:
| (12a) |
| (12b) |
| (12c) |
By manipulating Eq. 12a-12c into Eq. 9 and 11, the equations of motion of flexible gantry crane system yield non-linear coupled equations of motion and written in Eq. 13s. Terms {NK’} and {NK”}, indicate the partial derivative of shape functions with respect to trolley position.
Notation Δr and its derivatives indicate vectors of displacements and its derivatives, as well for the rest of the degrees of freedom of the crane framework. Under assumption that the crane framework is to be rigid or called rigid model, vibration in the Eq. 13 is vanished. Equations of motion of the system can be reduced into classical 3D-pendulum system with moving pivot and the results are the same with Newton’s motion law as presented by Eq. 14a-14b.
 | |
| Fig. 3: | Equivalent nodal forces of one space frame element |
 | (13a) |
where, ![]() are given by
are given by
 | (13b) |
 | (14a) |
| (14b) |
It is noted that because of very lengthy and tedious, equations for ![]() are not presented here.
are not presented here.
The damping matrix in the left side of Eq. 13a is assumed proportional to the combination of mass and stiffness matrix. Under this assumption, The Rayleigh damping theory is used. The damping matrix can be written as:
| (15) |
The proportionality factors is calculated by using damping ratio δ=δ1=δ2 and natural frequency ω1 and ω2.
| (16) |
Numerical approach: If the swing angles, θ and φ in the right side of Eq. 7a-7b and Eq. 13 are zero, the case would just be that of moving load case in crane framework, which imposed by (mt+mp) load. In order to solve Eq. 7a-7b and (13), the computational technique under Newmark-β and fourth-order Runge-Kutta method is proposed. The crane framework displacements are calculated by Newmark-β method of direct integration
The two parameters are selected as β=0.25 and γ=0.5, which implies a constant average acceleration with unconditional numerical stability, while payload angular displacements are calculated by fourth-order Runge- Kutta method. For each integration step, Newmark-β and Runge-Kutta methods are combined simultaneously to obtain the structure and payload responses (Table 1). The computational procedures with a time step of Δt that performs the direct numerical integration can be summarized as follows:
Step 1: Set initial condition for velocity and acceleration:
| (17) |
Step 2: The initial external force vector {F}0 = {F(t = 0)} is calculated using right side of Eq. 13 by using initial conditions ![]() of payload.
of payload.
| Table 1: | Newmar’s parameters |
 | |
Stap 3: The initial acceleration vector is calculated as:
| (18) |
Step 4: Evaluation of constants from α0 to α7 .The parameters αi are below.
Step 5: For each time step:
| • | The overall mass matrix [M] and stiffness matrix [K] of the system are generated by using Eq. 13 |
| • | Calculation of the first and second natural frequencies (ω1 and ω2) of the overall crane framework and the overall damping matrix [C] in Eq. 13 and 15 |
| • | Eqs. 7a, are solved to obtain |
| • | Equation of motion of the system is represented as below |
| (19) |
The effective load vector ![]() is below:
is below:
| (20) |
| • | The displacement, velocity and acceleration responses are computed with satisfying the following relationship: |
| (21) |
| (22) |
| (23) |
RESULTS AND DISCUSSION
The cross-sectional area of crane framework is uniform, isotropic and homogeneous material properties. The gravitational acceleration is g = 9.81 ms–2 and time interval is Δt = 0.005 s. Crane framework is discretized into 58 elements and 82 nodes. The issue of total number of elements and nodes will not be treated as a parameter that will be varied in the simulations. It is also noted that there is no damping either in dynamics of crane framework or dynamics of payload motion, unless particularly stated. This is expected to make it as a direct comparison with the pendulum model.
 | |
| Fig. 4: | Pendulum attached to a MSD system |
Simple case of a coupled dynamic system: The developed computer program will be verified first by solving a simple coupled dynamic model. The model and its equations of motion are taken from (Kyrychko et al., 2006), who used a simple nonlinear system consist of pendulum attached to a Mass-Spring-Damper (MSD). The configuration and the parameters of the system are depicted in Fig. 4. The system is excited by sinusoidal driving force as shown in Fig. 5.
Under the action of pendulum motion, the equations of motion are solved by developed Newmark-β-fourth- order Runge-Kutta and ODE-45 for nonlinear model. The displacements are shown in Fig. 6 and very good agreement between the solutions offered by both methods.
Open-loop responses of flexible gantry crane: In this subsection, as a test for the dynamic model in Eq.7a, 7c-7d and 13, open-loop responses are performed under two types of driving force fX , namely bang-bang input force and harmonic input force. It is noted that other forms of driving force could have been chosen, but here an arbitrary form is chosen to primarily attempt to model the real driving force situation for the actual crane system.
The parameters for cranes are shown in Table 2 while, the model and the dimensions of crane framework are taken from (http://www.spanco.com/literature) and shown in Table 3.
Responses under bang-bang input force: The simulation is performed where the bang-bang input force is applied to move the trolley of gantry crane. Magnitude of bang-bang input force is varied in order such that the trolley reaches 3, 6 and 12 m from the left end of the top beam of crane framework as depicted in Fig. 7.
 | |
| Fig. 5: | Driving force for pendulum attached to a MSD system |
 | |
| Fig. 6: | Pendulum attached to a MSD displacement (a) Vertical displacements (b) Swing angle responses |
| Table 2: | Crane parameters |
 | |
| Table 3: | Crane framework properties |
 | |
The differences between rigid and flexible model are noted with Δθ = θflexible– θrigid and Δφ = φ flexible –φ rigid.
When the trolley accelerates, payload swings behind the trolley. Vice versa, the payload swings ahead of trolley when trolley decelerates. The swing angles are identical when the trolley speed is constant or the trolley stops. The payload will continue swing although the force is taken after 13 sec (Fig. 8). This is due to the dynamics of payload is without damping as it can be seen from Eq. 7.
 | |
| Fig. 7: | Bang-bang input forces and trolley positions |
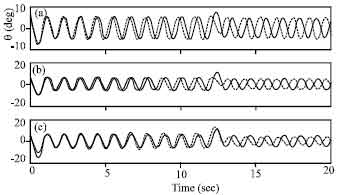 | |
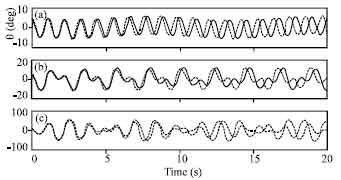
| Fig. 8: | Time history of under bang-bang-input force (—) flexible model (----) rigid model (a) 3m, (b) 6m and (c) 12m |
 | |
| Fig. 9: | Time history of Δ under bang-bang input force (a) 3 m, (b) 6 m and (c) 12 m |
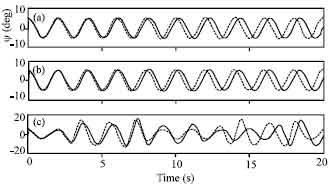
The accelerations and decelerations periods does not appear in swing angle φ, as one can notice from Fig. 10-11. That is because the horizontal (X) inertia force induced by moving trolley carrying a swinging payload significantly affects the payload swing in planar motion than that in space motion due to input force is applied in the horizontal direction. Further, amplitudes and frequencies of Δθ and Δφ are significantly affected by the change of trolley position on the top beam of crane framework as depicted in by Fig. 9 and 11.
 | |
| Fig. 10: | Time history of φ under bang-bang-input force (—) flexible model; (----) rigid model (a) 3 m, (b) 6 m and (c) 12 m |
 | |
| Fig. 11: | Time history of Δφ under bang-bang input force (a) 3 m (b) 6 m (c) 12 m |
 | |
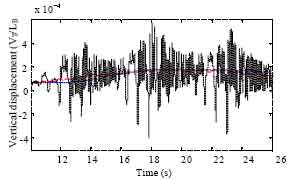
| Fig. 12: | Vertical displacements under bang-bang input force (—) 3 m; (- - -) 6 m; (….) 12 m; corresponding static displacement |
From Fig. 12, it can be found that the vertical displacements of the central point cp of the top beam of crane framework damps to zero when the trolley stops at the right side of beam for position 12m and to corresponding static displacements for position 3 and 6 m.
 | |
| Fig. 13: | Harmonic input force |
 | |
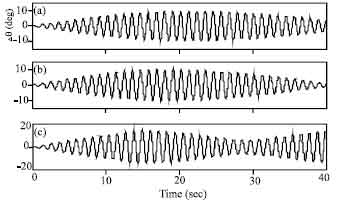
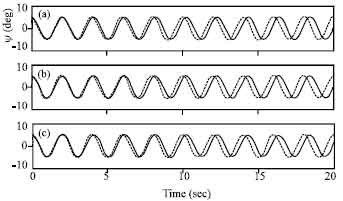
| Fig. 14: | Flexible and rigid model responses of θ flexible model (- - -) rigid model (a) 0.1 ωn (b) 0.5 ωn and (c) 0.95 ωn |
 | |
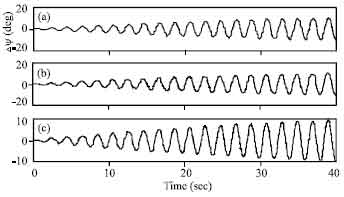
| Fig. 15: | Flexible and rigid model responses of φ flexible model (- - -) rigid model (a) 0.1 ωn (b) 0.5 ωn and (c) 0.95 ωn |
The change of trolley position on the top beam of crane framework induces slighter vertical displacement.
Responses under harmonic input force: The effect of different harmonic input force frequencies on the responses of payload swings and crane framework is investigated. All the parameters are identical with Table 2 and 3. The harmonic input force frequencies are 0.1ωn, 0.5ωn and 0.95ωn as presented in Fig. 13. It is noted that term ωn corresponds to natural frequency of payload with hoist cable length, ![]() =1m.
=1m.
 | |
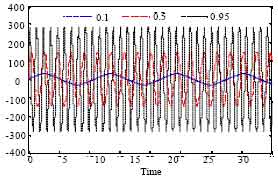
| Fig. 16: | Vertical displacements under harmonic force input (—) 0.1 ωn; (- - -) 0.5 ωn; (---) 0.95 ωn |
The dynamic responses of payload swings and difference with rigid model are shown in Fig. 14-15. The results show that time history θ of and φ depend on the harmonic frequency of input force. As the harmonic frequency approaches the natural frequency of payload, the amplitudes of swing angles increase erratically. It is seen also that swing angle, θ is larger than φ.
Vertical displacements of the central point cp of top beam of crane framework under variation of harmonic force input are shown in Fig. 16. It is observed that different harmonic input force frequencies significantly affect the vertical responses of crane framework. As the harmonic frequency approaches the natural frequency of payload, the amplitudes of swing angles increase erratically. The large amplitude of swing angles make the vibration amplitudes of axial, vertical and lateral responses getting larger because of coupled system. Only vertical displacement is presented because similar trends are noted for axial and lateral displacements.
CONCLUSION
The equations of motion show that the flexible gantry crane system can be modeled by moving trolley carrying a swinging payload on flexible crane framework. It behaves as an elastic pendulum system with flexible moving support which undergoes acceleration in three directions.
Numerical simulations are then carried out to investigate the responses of gantry crane system by accounting flexibility of crane framework and hoist cable. Simulations show that gantry crane and framework is a coupled dynamic system, where bidirectional dynamic interaction is contributed by the flexibility of the crane framework and hoist cable. A direct access to the system equations enable the applications for advanced dynamic analysis, structural design and controller design for vibration suppression.
ACKNOWLEDGMENT
The authors are thankful to Universiti Teknologi PETRONAS for providing the research facilities.
REFERENCES
- Ren, H.L., X.L. Wang, Y.J. Hu and C.G. Li, 2008. Dynamic response analysis of a moored ship-crane with a flexible boom. J. Zhejiang Univ. Sci. A, 9: 26-31.
CrossRefDirect Link - Bhimani, A., 1999. Considerations for large cranes. Proceedings of the Facilities Engineering Seminar American Association of Port Authorities, Feb. 3-5, Corpus Christi, Texas, pp: 1-10.
Direct Link - Oguamanam, D.C.D., J.S. Hansen and G.R. Heppler, 2001. Dynamics of a three-dimensional overhead crane system. J. Sound Vibrat., 242: 411-426.
CrossRef - Yang, W., Z. Zhang and R. Shen, 2007. Modeling of system dynamics of a slewing flexible beam with moving payload swinging. Mech. Res. Commun., 34: 260-266.
CrossRef - Zrnic, N., D. Oguamanam and S. Bosnjac, 2006. Dynamics and modeling of mega quayside container cranes. FME Trans., 34: 193-198.
Direct Link - Mitrev, R., 2007. Mathematical modelling of translational motion of rail-guided cart with suspended payload. J. Zhejiang Uni. Sci. A, 8: 1395-1400.
CrossRefDirect Link - Wu, J.J., 2004. Dynamic responses of a three-dimensional framework due to a moving carriage hoisting a swinging object. Int. J. Numerical Methods Eng., 59: 1679-1702.
Direct Link - Kyrychko, Y.N., K.B. Blyuss, A. Gonzalez-Buelga, S.J. Hogan and D.J. Wagg, 2006. Real-time dynamic sub structuring in coupled oscillator-pendulum system. Proc. R. Soc. A, 462: 1271-1294.
CrossRefDirect Link - Masoud, Z.N., 2009. Effect of hoisting cable elasticity on anti-sway controllers of quay-side container cranes. Nonlinear Dyn., 58: 129-140.
CrossRefDirect Link