
R. M. Kuppan Chetty
Precision Engineering and Instrumentation Laboratory, Department of Mechanical Engineering, Indian Institute of Technology Madras, Chennai, 600036, India
M. Singaperumal
Precision Engineering and Instrumentation Laboratory, Department of Mechanical Engineering, Indian Institute of Technology Madras, Chennai, 600036, India
T. Nagarajan
Department of Mechanical Engineering Department, Universiti Teknologi PETRONAS, Bandar Seri Iskandar, 31750 Tronoh, Perak, Malaysia
Journal of Applied Sciences
Year: 2011 | Volume: 11 | Issue: 9 | Page No.: 1501-1509







ABSTRACT
This study describes the development of a distributed planning and control strategy for guiding multiple mobile robots in a leader-follower formation framework, which combines together formation planning, navigation and active obstacle avoidance in industrial manufacturing environments. A layered formation control architecture consisting of functional behaviors based on the relative motion states of the robots, classified into two levels is developed. The supervisor level in the framework handles the higher-level missions such as formation and inter-robot communication and the lower level deals with the dynamic control of robots during navigation. Dynamic role switching mechanism through the exchange of leadership is incorporated in this work to tackle the problem of obstacle avoidance in the follower path. The proposed approach is validated through state based laboratory experiments using commercially available robot research platforms and the results obtained are discussed.
PDF Abstract XML References Citation
Received: October 22, 2010;
Accepted: November 01, 2010;
Published: April 18, 2011
How to cite this article
R. M. Kuppan Chetty, M. Singaperumal and T. Nagarajan, 2011. Distributed Formation Planning and Navigation Framework for Wheeled Mobile Robots. Journal of Applied Sciences, 11: 1501-1509.
DOI: 10.3923/jas.2011.1501.1509
URL: https://scialert.net/abstract/?doi=jas.2011.1501.1509
DOI: 10.3923/jas.2011.1501.1509
URL: https://scialert.net/abstract/?doi=jas.2011.1501.1509
INTRODUCTION
A manufacturing environment is extensively complex and inherently unpredictable. With every new product being designed and manufactured the complexity of manufacturing technology increases. Thus the final product requires different parts and subassemblies, manufactured at various levels of the environment with variation in machining processes as well as variation in assembly processes. All of these variations cause variations in part flows in the manufacturing environment, which in turn can cause bottlenecks in these part flows. This is a result of the fact that some machining processes take more time than others and this causes parts that do not need to undergo these longer processes to be held up in the manufacturing line. One possible solution to this problem is the application of Intelligent Mobile Robots for handling of material transportation of waiting parts in the assembly line.
Application of intelligent Wheeled Mobile Robots (WMR) for material handling in the manufacturing environment has been the topic of research in the past decade. Even though researchers have succeeded in applying mobile robots for material handling purpose in the shop floor environment, transporting heavy objects in the assembly line is still a challenge. The dynamical characteristics of a manufacturing environment impose particular abilities a mobile robot should have if it is to operate on the shop floor efficiently, accurately and successfully. Consequently, a WMR needs to adapt itself to everlasting changes. Under such conditions, the use of multiple WMR in closed defined geometric spatial pattern/ formation can be a solution for such applications.
One of the essential problems in guiding multiple mobile robots in such dynamically changing environments environments is to plan, navigate and coordinate the motion of robots, avoiding obstacles as well as each other while transporting the materials/objects towards the goal. Further it requires the robots to control their relative position and orientation between them on the fly. Hence the control of group of mobile robots performing such tasks requires coordination at different levels starting from navigation to formation (Sugar et al., 2001).
A variety of strategies and control approaches have been adopted in the literature such as the graph theory (Desai et al., 2001; Desai, 2002), vector potential field (Yamaguchi et al., 2001), virtual structure (Balch and Arkin, 1998), leader-follower (Lawton et al., 2003; Chaimowicz et al., 2004; Do and Pan, 2007) and behavior-based (Brooks, 1985; Mataric, 1997; Arkin, 1998; Pirjanian, 2000; Werger and Mataric, 2001; Liu et al., 2007; Monteiro and Bicho, 2002) approaches for formation control of group of coordinated robots, depending on the specific scenarios. Further, a comprehensive review of robotic formation, control approaches, their advantages and disadvantages are given by Chen and Wang (2005) and Ren et al. (2007). Among all the approaches mentioned above, leader-follower approach has been widely adopted by the researchers in industrial and military environments.
Even though robots are able to move in a closed defined formation in the methods found in the literature, the major limitation is to achieve a stable formation between the robots in the group in dynamically changing, unknown environments industrial environments filled with obstacles. Further, in most of the studies found in the literature, the trajectory of the group leader is specified and the formation studies between the robots are concentrated at a higher level. Besides this, robots also need other capabilities such as to plan their paths to their particular goal by avoiding collision between them, and obstacles in the environment of interest. However, combining the formation planning and navigational capabilities to the group of robots to achieve a stable formation for efficient transportation of materials in the complex industrial environment has not been addressed.
Another important challenge for controlling multiple wheeled mobile robots in a closed defined formation is the active obstacle avoidance on follower robots, which is necessary for the robots in the team to remain in the closed defined geometric formation even though they are perturbed by critical conditions; which is not studied in detail in the literature. Hence the more challenging and important problem is to combine the formation planning and active obstacle avoidance on the follower path, because the follower robot needs, not only to perform obstacle avoidance but also control itself to remain in the desired formation between the other robots in the group without losing the material contact it is carrying along with leader.
Inspired by the observations from the literature, our research objective is to develop a formation framework for the control and coordination of group of mobile robots, which combines together formation planning, navigation and active obstacle avoidance. Towards this goal, our contributions are of two fold. First, a layered distributed control architecture consisting of functional behaviors based on the relative motion states of the robots, classified into two levels is developed. The supervisor level in the architecture handles the higher level objectives such as formation and inter-robot communication and the lower level deals with the dynamic control of the robots while navigating the environment. Secondly, to address the problem of obstacle avoidance in the follower, a dynamic role switching methodology between the behaviours and robots is incorporated, where the robots perform different roles in the group interchangeably. This allows the robot designated as follower to trade its role with the leader to avoid obstacle on its path while maintaining the desired formation. The proposed approach is validated through experiments using commercially available Pioneer robot research platforms.
MULTI ROBOT FORMATION CONTROL
Leader-follower formation control: The main intention of this work is to consider how to guide a group of mobile robots in a closed defined formation relative to each other, while navigating in a dynamic industrial environment. To perform this collective task, layered distributed control architecture whose components are the fundamental behaviours/motion states of the robots, similar to the pack and homogeneous controller is developed and proposed as in Fig. 1. In this layered architecture to achieve the desired objective of the formation planning and navigation in a distributed manner, the total functionality of the multirobot system is decomposed into functional behaviours such as Navigation and Formation, based on the motion states of the robots as given by Pirjanian (2000) and Goldberg and Mataric (2001), utilizing the methodology of the behavior based reactive approach.
The fundamental behaviours/motion states of the robots are derived based on the advantages of the behaviour based approach and the objective of the entire system, and are arranged into two levels such as lower level navigation and supervisor level formation, which works on individual goals concurrently and asynchronously, which yields the collective task upon integration. Both these layers and behaviours are related using the priority-based arbitration where the entire sets of behaviours are swapped in and out of execution for achieving the goals such as navigation and formation. Therefore, the robots select a particular behaviour/motion state, based on the sensory information perceived by the robot sensors from environment during the fly.
A reactive controller made up of simple prepositional representation comprising of if-then-else model with task specific sensing, reasoning and planning is used to formulate the behaviours at the navigational level, provides the necessary navigational capabilities and deals with the dynamic control of robots while guiding them in the environment of interest. Further, to have the theoretical formalization and the convergence of the robots into the desired formation, a closed-loop tracking controller at the supervisor level formation is realized using the kinematic model of robots employed in the group in the leader follower model to handle the higher-level objective of multi robot formation.
 | |
| Fig. 1: | Layered formation control architecture |
Referring to Fig. 1 the rectangles in the architecture represent the robot sensors, with the sensor values being transmitted to the behaviors along the long dashed lines. The behaviors themselves are drawn as rectangles with rounded corners arranged in three levels of hierarchical layers namely avoid obstacle layer, explore layer, supervisor layer. The dotted lines represent the command signals sent by behaviors to the actuators and the inter behavior control signals. The arrowheads in the command lines indicate the priority of the behaviors, which constitutes the pathway to the actuator. The subsumption style priority based arbitration scheme is represented by ‘![]() ’ with the actuator command coming from upper level layer taking the precedence. Further, the details on the selection of layers and behaviors and how they are formulated are addressed by Goldberg and Mataric (2001), Li et al. (2004), Shao et al. (2005), Chetty et al. (2007), Dougherty et al. (2004), Stormont and Chen (2005) and Chetty et al. (2010).
’ with the actuator command coming from upper level layer taking the precedence. Further, the details on the selection of layers and behaviors and how they are formulated are addressed by Goldberg and Mataric (2001), Li et al. (2004), Shao et al. (2005), Chetty et al. (2007), Dougherty et al. (2004), Stormont and Chen (2005) and Chetty et al. (2010).
Modeling of formation behavior: Formation behavior is made up of mathematical formulation of tracking controller based on the kinematics of the non-holonomic wheeled mobile robot in Fig. 2.
In formation control, the objective of the controller is to find the values of the translational and rotational wheel velocities vF and ωF of the follower robots that the formation/separation errors (linear and angular) decay asymptotically to zero and position the follower in the desired geometric pattern with its leader.
 | |
| Fig. 2: | Kinematic model of robots in leader follower configuration |
There are two critical parameters l and φ that determine the geometric shape of the two-vehicle sub system as in Fig. 2.
Let l and ld be the relative and desired linear separation or it can be considered as the length of the object/ material it has to transport and φ and φd be the relative and the desired angular separation between the robots respectively. To achieve the desired formation the control has to make l → ld and φ → φd and to bring the separation and orientation errors asymptotically to zero. In this case, the control problem reduces to a trajectory tracking control problem rather than the regulation problem of the follower, where it plans its path to efficiently position itself relative to its leader by observing the leaders information Hence a tracking controller is to be derived for the follower robots to remain in the closed formation. Therefore the objective of the tracking controller is to find the values of velocities of the follower robots as shown in the block diagram represented by Fig. 3.
In order to formulate the tracking control algorithm to find out the wheel velocities of the follower, let the position of the leader and the follower robot in a unit time as in Fig. 2; be given by XL, YL and XF, YF, respectively in the fixed ground coordinate system. Let Xr and Yr be the position of the reference robot, which is the desired position to be reached by the follower to remain in a formation with the desired linear and angular separation with the leader. The orientation of leader and follower robots is given by θL and θF, respectively and the orientation of the reference robot θr is same as the orientation of the leader, which is the basic requirement for the formation platoons.
 | |
| Fig. 3: | Block diagram of formation controller |
The position of the reference robot cannot be found in the real world.
Hence, based on the kinematic model the position of the reference robot in the ground frame is obtained as:
 | (1) |
The position and orientation of the follower robot is given by:
 | (2) |
After obtaining the error coordinates in the robot coordinate frame and applying suitable feedback linearization as given in [xx], the control law for vF and ωF is obtained as:
 | (3) |
where, xe and ye stands for the position error between the desired position i.e position of the reference and the follower robot in new coordinate system and k1 and k2 are positive integers greater than zero. Equation 3 forms the kinematic model of the formation control behavior in this approach.
Obstacle avoidance on follower: One of the most important problems and the major challenge is the avoidance of obstacles in the path of the robots designated other than the leader is the major challenge in guiding the robot group in an unknown environment. To avoid this problem, a dynamic role switching methodology based on the exchange of leadership between the robots is incorporated in the above developed formation control methodology. The principle behind the switching strategy is that the robot designated as the leader in the real time takes the responsibility of guiding the group through the environment by executing the navigational part of the controller and the robot designated as the follower follows the leader by executing the formation controller.
As the follower perceives the obstacle on its path based on the sensory information received from its sensors, it sends a request packet to the leader to release the leadership. When the current leader receives the request of releasing the leadership, it immediately releases the leadership to the follower, through an explicit inter-robot socket communication mechanism. Once the follower attains the leadership, it switches its role from follower to leader which in turn switches from the controllers formation mode to the navigational mode and starts navigating the environment as a temporary leader. In the other side leader robot switches its control to the formation mode and plans its path to track the temporary leader in the defined spatial pattern until the obstacle has been avoided.
 | |
| Fig. 4: | Role of angular separation while role switching when (a) R1 as leader and R2 as follower, (b) R2 as leader and R1 as follower |
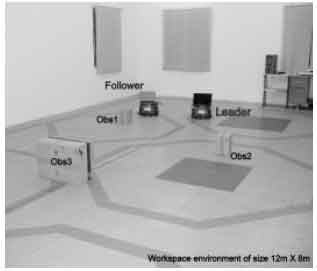 | |
| Fig. 5: | Experimental setup of two Pioneer mobile robots in workspace environment filled with obstacles |
Under such conditions, the desired linear separation of the follower remains the same and the angular separation changes based on the geometric relationship between the robots as given by Eq. 4 and as in Fig. 4:
 | (4) |
After avoiding the obstacle, temporary leader releases the leadership back to the previous leader, starts executing the formation behaviour, and plans its path according to the leader. The Follower only leads the group during short time periods in the fly when it has to avoid the obstacle present on its path. Therefore, at any moment during the coordination motion, the robot performing the leading role can become a follower and any follower can take over the leadership of the team and makes the robot controller to exchange their control modes from navigation to formation and formation to navigation, based on their previous roles and sensory information through explicit inter-robot communication. Hence, the dynamic switching roles/behaviours in the control architecture allow the robots to trade their roles between them and to actively avoid obstacles on the robots designated as follower’s path while maintaining the desired formation.
EXPERIMENTAL DESCRIPTION
In order to evaluate the performance of the proposed formation control approach, experiments were carried out with two commercially available Pioneer P3DX mobile robot research platforms, in bidirectional multiple client-server architecture as in Fig. 5, where, Robot R1 is designated as server/leader and Robot R2 as client/follower performing the combined task of navigation and formation. Robot server is explicitly connected to multiple clients such as a remote host and the follower through wireless TCP/IP communication protocol.
As mentioned in previous sections, both the robots involved in this experiment are identical in their kinematic model with same set of sensors, actuators and control algorithm. Communication protocols and the control algorithm guarantee the assignment of roles and the coordination between the robots. The robot designated as leader/server in the team services the control signal and parameter request from both the clients synchronously with a frequency of 5 Hz. A synchronous interaction between the leader and the follower is developed in such a way that the follower always maintains the desired positions and the orientations independently of the leader through the formation behaviour of the control algorithm.
Two experiments were carried out two measure the performance of the formation control approach by making the robot to move to goal in a parallel line formation assuming the linear separation distance as the length of the object to be carried from the initial position to the goal position by navigating the environments without colliding with obstacles in the environment. In these experiments the robots are made to carry the object side by side as in Fig. 5.
In the first experiment, the initial and desired separation values are taken as 1000 mm, 270° and 1000 mm, 270°, respectively and both the robots are employed with the layered control architecture presented in section 2. Initial positions of both the robots in the coordinate frames are at 0, 0, 0° and 0, -1000, 0°, respectively. The leader is made to navigate an environment of 12m by 10m rectangular workspace filled with rectangular obstacles of size 200x180 mm and 550x400 mm as in Fig. 5. Leader velocities are fixed at 160 mm sec-1 and 4° sec-1, obstacle distance of 800 mm and safe wander time of 5 sec and the follower is made to follow the leader with the desired separation and orientation as mentioned earlier.
Further, experimental study on dynamic switching of roles is carried out to test the performance of the approach to have active obstacle avoidance in the follower path and to measure formation convergence, even though it is disturbed by the perturbation. Experiment is conducted in the similar environment utilised in the third experiment and the initial and desired separation values are taken as 1019 mm, 258° and 900 mm-1, 270°. In this experiment, both the robots are employed with the same control configuration, having the capability to perform both navigation and formation. The results on the above experiments are reported in detail in the next section.
RESULTS AND DISCUSSION
In this section, the behavior of the hybrid formation controller through experiments are reported and discussed in detail.
Figure 6 to 10 show the results of the experiments illustrating the good performance of the control algorithm. For the first experiment, Fig. 6 shows the trajectory of the robots in the parallel line formation, where the leader robot navigates the environment by switching between safe wandering, avoid obstacle behaviours marked as ‘S’, ‘O’, respectively whenever it perceives the obstacle information from the environment. Moreover the performance of the formation controller is also observed from Fig. 6, where follower tracks the behaviour of the leader form its initial linear and angular separation and remains in the desired formation relative to the leader throughout the workspace. It also shows that, the formation controller minimizes the separation error to zero, keeping the robots in the tight-coupled formation in the environment filled with obstacles.
Figure 7 shows the orientation plot of the above experiments, where it can be observed that the tracking controller makes the follower to remain in the same orientation with the leader throughout the fly, making the system suitable for transporting objects from one location to the goal in the dynamic industrial environments.
 | |
| Fig. 6: | Trajectory of the two robots in parallel line formation with leader in wander mode |
 | |
| Fig. 7: | Orientation of robots in parallel line formation |
Figure 8 and 10 shows the experimental results on dynamic switching of roles, carried out to test the obstacle avoidance in the follower path. Figure 8 shows the trajectory of leader and follower robots performing the combined task of navigation, formation and obstacle avoidance where 'O' represents the obstacles in the path of the robots and the dotted rectangles represents the switching of roles and leadership between the robots to reach the desired goal. Figure 9 shows the behavioural/state output of the robots R1 and R2 involved in the experiment Initially, robot R1 is designated as the leader and leads R2 which follows the motion of the leader in the parallel line formation with the desired separation of 800 mm and 270°. At t = 8.4 and 26 sec, follower finds the obstacle on its path, request for exchange of leadership with the leader, acquires the leadership and performs obstacle avoidance on its path.
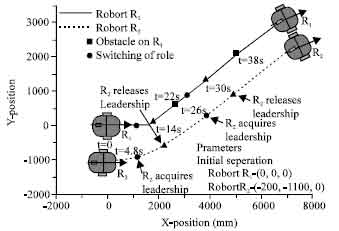 | |
| Fig. 8: | Trajectory of robots performing obstacle avoidance on both leader and follower robots in a parallel line formation |
 | |
| Fig. 9: | Behavioral/state outputs of the robots |
 | |
| Fig. 10: | Formation plot of robots experiencing obstacle avoidance on both leader and follower robots in collateral formation |
| Table 1: | Formation errors |
 | |
After avoiding the obstacle, robot R2 relinquishes the leadership back to the leader at t =14 and 30 sec. This can be clearly observed from Fig. 9, where the role switching behaviour takes precedence which intern activates obstacle avoidance behaviour present in the control architecture of robot R2. This clearly indicates that at any moment during the coordinated motion, the follower robot, which experiences obstacle on its path, can take over the leadership from the leader and the robot performing the lead role can become a follower by switching their leadership between themselves.
Figure 10 shows the variation in the linear and angular separation errors, where the robot R2 performs obstacle avoidance on its path by switching its roles with R1 and preserves the formation by adjusting its angular separation as given by Eq. 4. It is also observed; that the formation controller takes 9 sec to settle in the desired formation with the leader and the formation errors is estimated to be less than 1.4 and 0.5% in both linear and angular separation between the robots.
Further experiments have been carried out to measure the convergence of formation between the robots in various formation topologies, which can be used, for carrying the objects from the initial position to the goal position with more number of robots. In this experiments the Instantaneous Centre of Curvature (ICC) of the leader robot is taken as 2.3 m with the desired linear separation of 1000 mm and the desired angular separation is varied around the leader to form various formation topologies such as one half of the collateral, wedge shaped and a in-line formation and the formation errors are recorded as given in Table 1. It is observed from Table 1, that the formation error is estimated as ±1.76% in linear separation and±0.25% in angular separation and the maximum formation error is at the wedge and in-line formation, when the desired angular separation is at 157°, 202° and 180°.
CONCLUSION
A layered formation framework for the control and coordination of group of mobile robots, combining together formation planning, navigation and active obstacle avoidance is developed in this work. The combined advantages of the behaviour based reactive approach and the leader-follower formation approach is utilized in this framework. Two separate controllers such as a closed-loop tracking controller and the behaviour based reactive controller are used to provide the formation and navigation capabilities to the robots.
Dynamic role switching mechanism through the exchange of leadership is incorporated in this work to tackle the problem of obstacle avoidance in the follower path. Laboratory experimental studies were carried out, and the results are presented in this study. Experimental results validate the performance of the proposed approach to combine formation planning, navigation and obstacle avoidance in the multi-robot systems applied to the tightly coupled tasks.
Our future work will be on conducting the experiments carrying a real object in the real dynamic industrial environment filled with obstacles. The switching control strategy between the behaviours and robots arises many interesting questions such as deadlocks between the robots when they exchange the leadership. There are many cases to be solved to answer this deadlock phenomenon. Our future work will also extend into the issues to overcome the deadlock situation in the multi robot systems through simulation and experimentation studies.
REFERENCES
- Sugar, T., J.P. Desai, V. Kumar and J.P. Ostrowski, 2001. Coordination of multiple mobile manipulators. Proc. IEEE Int. Conf. Robotics Automat., 3: 3022-3027.
CrossRef - Desai, J.P., J.P. Ostrowski and V. Kumar, 2001. Modeling and control of formations of nonholonomic mobile robots. IEEE Trans. Robotics Automat., 17: 905-908.
CrossRef - Desai, J.P., 2002. A graph theoretic approach for modeling mobile robot team formations. J. Robotic Syst., 19: 511-525.
CrossRefDirect Link - Yamaguchi, H., T. Arai and G. Beni, 2001. A distributed control scheme for multiple mobile robotic vehicles to make group formations. Robotics Autonomous Syst., 36: 125-147.
CrossRef - Balch, T. and R.C. Arkin, 1998. Behavior-based formation control for multirobot teams. IEEE Trans. Robot. Autom., 14: 926-939.
CrossRefDirect Link - Lawton, J.R.T., R.W. Beard and B.J. Young, 2003. A decentralized approach to formation maneuvers. IEEE Trans. Rob. Autom., 19: 933-941.
CrossRef - Chaimowicz, L., R.V. Kumar and M.F. Campos, 2004. A mechanism for dynamic coordination of multiple robots. Int. J. Autonomous Robots, 17: 7-21.
Direct Link - Brooks, R.A., 1985. A robust layered control system for a mobile robot. IEEE J. Robot. Automat., 2: 14-23.
CrossRef - Mataric, M.J., 1997. Behavior based control: Examples from navigation, learning and group behavior. J. Exp. Theoret. Artific. Intell., 9: 323-336.
Direct Link - Pirjanian, P., 2000. Multiple objective behavior-based control. J. Robotics Autonomous Syst., 31: 53-60.
CrossRef - Werger, B.B. and M.J. Mataric, 2001. From insect to internet: Situated control for networked robot teams. Ann. Math. Artific. Intell., 31: 173-197.
CrossRefDirect Link - Liu, B., R. Zhang and C. Shi, 2007. Formation control of multiple behavior based robots. Proc. IEEE Int. Conf. Comput. Intell. Sec., 1: 544-547.
CrossRef - Monteiro, S. and E. Bicho, 2002. A dynamical systems approach to behavior based formation control. Proceedings of the IEEE International Conference on Robotics and Automation, May 11-15, Washington, DC., pp: 2606-2611.
CrossRef - Ren, W., K.L. Moore and Y.Q. Chen, 2007. High-order and model reference consensus algorithms in cooperative control of multi-vehicle systems. ASME J. Dyn. Syst. Measure. Control, 129: 678-688.
CrossRefDirect Link - Li, X., J. Xiao and J. Tan, 2004. Modelling and controller design for multiple mobile robots formation control. Proceedings of the IEEE International Conference on Robotics and Biometrics, Aug. 22-26, Shenyang, pp: 838-843.
CrossRef - Shao, J., G. Xie, J. Yu and L. Wang, 2005. Leader-Following formation control of multiple mobile robots. Proceedings of the IEEE International Symposium on Intelligent Control, June 27-29, Limassol, pp: 808-813.
CrossRef - Chetty, R.M.K., M. Singaperumal and T. Nagarajan, 2007. Coordination control of behavior based distributed networked robotic systems: A state modeling approach. Proc. SPIE, 6794: 2F1-2F6.
CrossRef - Chetty, R.M.K., M. Singaperumal and T. Nagarajan, 2010. Behavior based planning and control of leader follower formations in wheeled mobile robots. Int. J. Adv. Mechatronics Syst., 2: 281-296.
Direct Link - Do, K.D. and J. Pan, 2007. Nonlinear formation tracking control of unicycle-type mobile robots. Robotics Automation Syst., 55: 191-204.
CrossRefDirect Link