
M.A. Miskam
Engineering Campus, Collaborative Microelectronic Design Excellence Centre, Universiti Sains Malaysia, 14300 Nibong Tebal, Sri Ampangan, Pulau Pinang, Malaysia
O. Sidek
Engineering Campus, Collaborative Microelectronic Design Excellence Centre, Universiti Sains Malaysia, 14300 Nibong Tebal, Sri Ampangan, Pulau Pinang, Malaysia
A.Z. Ruhaifi
Engineering Campus, Collaborative Microelectronic Design Excellence Centre, Universiti Sains Malaysia, 14300 Nibong Tebal, Sri Ampangan, Pulau Pinang, Malaysia
Journal of Applied Sciences
Year: 2009 | Volume: 9 | Issue: 9 | Page No.: 1658-1667







ABSTRACT
This study, present the analysis of the capacitive in-plane linear comb drive microelectromechanical system (MEMS) accelerometer using system-level simulation techniques, finite element method (FEM) and simple analytical modeling. The silicon on insulator high aspect ratio micromachining (SOI-HARM) process is use to fabricate the device. The behavior of the device will be simulated using DC operating point analysis, mechanical resonance frequency analysis, vary analysis, DC transfer analysis and transient analysis. The results agree well with the results obtained by Architect, FEM and analytical analysis. The design methodology and circuit implementation of bandgap reference for MEMS accelerometer also will be described. A low variation in voltage reference is proposed and simulated using Silterra 0.13 μm CMOS technology. The voltage reference is operated with a supply voltage of 2.5 V to achieve an output reference of 1.17949 V. The circuit has achieved a very small variation in reference voltage of about ± 0.36 mV resulting from temperature changes between -50 to 100 °C and maximum PSSR of -49.03 dB.
PDF Abstract XML References Citation
How to cite this article
M.A. Miskam, O. Sidek and A.Z. Ruhaifi, 2009. Analysis of Capacitive Microelectromechanical System Accelerometer Proposed with Voltage Reference in Read-Out Circuit. Journal of Applied Sciences, 9: 1658-1667.
DOI: 10.3923/jas.2009.1658.1667
URL: https://scialert.net/abstract/?doi=jas.2009.1658.1667
DOI: 10.3923/jas.2009.1658.1667
URL: https://scialert.net/abstract/?doi=jas.2009.1658.1667
INTRODUCTION
A micro-electromechanical system (MEMS) is a process technology used to create tiny integrated devices or systems that combine mechanical and electrical components. They are fabricated using integrated circuit (IC) batch processing techniques and can range in size from micrometers to millimeters. These devices (or systems) have the ability to sense, control and actuate on the micro scale and generate effects on the macro scale. MEMS technology exhibits many advantages indigenous to IC technology such as cost, size and weight reduction (Fokhrul et al., 2008). MEMS has been identified as one of the most promising technologies for the 21st century and has the potential to revolutionize both industrial and consumer products by combining silicon-based microelectronics with micromachining technology (Bernhard and Howe, 1996).
Accelerometers are probably the most common application of MEMS technology, as they only require sensing the movement of a mass subject to acceleration (Dan Haronian, 2000). Accelerometers which can be classified according to their transduction mechanisms have been used in microaccelerometers i.e., piezoresistive, tunneling, resonant, thermal, optical, electromagnetic, piezoelectric and capacitive. Accelerometers that implement capacitive sensing output measure acceleration based on a change in capacitance due to a moving plate or sensing element. These devices are used across a very wide range of applications i.e., automobile air bags (Zimmermann et al., 1995), navigation (Josselin et al., 1999) and instrumentation (Tan and Park, 2002). This method of sensing is able to sense with high accuracy and stability.
In the past several years, extensive research has been done on the design, fabrication, modeling and structural analysis to increase the sensitivity of the device. For example, the sensitivity of the capacitive accelerometer can be improved by increasing the proof mass and the number of sensing fingers arrays and decreasing the spring stiffness. Majority of the effort goes towards improving the performance characteristics and reducing manufacturing cost (Bernhard and Howe, 1996; Gang et al., 1999; Junseok et al., 2005; Vivek et al., 2006; Seiji et al., 2007; Chih-Ming et al., 2008; Krishnamoorthy et al., 2008; John et al., 2008).
Voltage reference is an important building block for MEMS accelerometer read-out circuit architecture (Fig. 1) because a stable bias voltage or power supply source is needed.
 | |
| Fig. 1: | Read-out circuit architecture for MEMS accelerometer |
A reference circuit is an independent voltage or current source that has a high degree of precision and stability. A conventional bandgap reference adds the forward-bias voltage across p-n diode and that voltage is weighted by adjusting the ratio of two resistors. The output of the reference voltage will be unstable in case of improper weighing. Thus, the bandgap reference should utilize the negative-temperature-coefficient unsilicided N-island resistor and unsilicided P-island resistor as a weighed component. This resistor ratio can effectively eliminate the temperature drift of the reference voltage (Rasoul and Atarodi, 2003).
The aim of this study is to analyze the capacitive MEMS accelerometer using system-level simulation techniques, FEM and simple analytical modeling. This simulation study will explain the behavior of the designed MEMS accelerometer using DC operating point analysis, mechanical resonance frequency analysis, vary analysis, DC transfer analysis and transient analysis. Simulation results are discussed and performance of the design is presented. The design methodology and circuit implementation of bandgap reference for MEMS accelerometer also will be described because this voltage reference is an important building block in read-out circuit for the designed MEMS accelerometer.
MATERIALS AND METHODS
Proposed structure: The sensor transfers the position change into capacitive variation to detect acceleration. It is composed of a proof mass suspended by four straight beams and comb fingers (Fig. 2).
 | |
| Fig. 2: | Schematic diagram of comb drive MEMS accelerometer designed structure |
The central part of this mass is perforated to improve the technological release step and the air damping. The total device structure size is 1021 by 1295 μm. The accelerometer has a proof mass of 140 μm by 1295 μm with multiple 10 μm by 10 μm releasing holes. The 100 movable sensing fingers and fixed fingers are the same size of 350 μm long and 6 μm wide. Each straight beam is 246 μm long and 2 μm wide. The completely released structure is uniformly 60 μm thick. The silicon used as mechanical structures has a property elastic modulus of 1.70x105 MPa, Poison’s ratio of 2.70x10-1 and density of 2.34x10-15 kg μm-3.
Modeling and simulation: Capacitive comb drive accelerometer has been designed, modeled and simulated using Architect and Analyzer modules in commercial software, CoventorWare®2006. Architect is a system-level design environment that benefits from the combination of MEMS behavioral models and the IC circuit components. Analyzer is a solver solution for physics simulation starts with a 3-D model created from a 2-D layout and process file, or a model imported from a third-party solid modeling tool. The initial process starts with schematic creation using Architect module (Fig. 3).
The silicon on insulator high aspect ratio micromachining (SOI-HARM) process is used to fabricate the device. This process is a metal-last process based on the deep dry etching (or DRIE) of silicon. A process editor is used to create 3-D model building by defining various parameters such as substrate, deposition of selected material, etching-type, depth and masks. The completed schematic is transformed into a 2-D layout and 3-D solid model. This solid model is then meshed for further finite element analysis (Fig. 4).
 | |
| Fig. 3: | Schematic drawing of capacitive comb drives MEMS accelerometer in Architect Module |
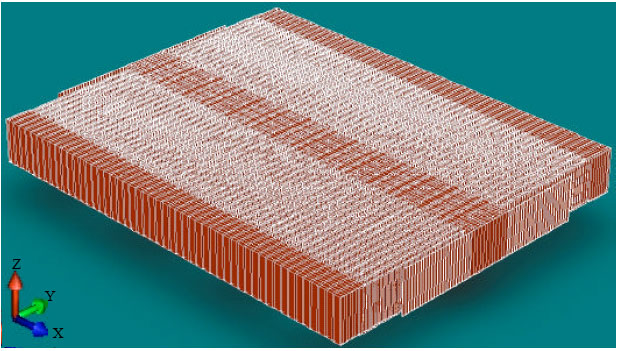 | |
| Fig. 4: | Meshed model of capacitive comb drive MEMS accelerometer |
The behavior of the device will be simulated using DC operating point analysis, mechanical resonance frequency analysis, vary analysis, DC transfer analysis and transient analysis.
DC operating point analysis: DC operating point analysis is run to find values of the system during steady state at time zero. The DC bias values of the electrical component and the initial displacements of the mechanical components are determined from this analysis. The analysis is repeated for several times by using various voltages. The electrostatic force can be calculated by:
| | (1) |
The restoring elastic force can be calculated by:
| | (2) |
At equilibrium, the total force acting on the movable structure in x-axis is zero:
| | (3) |
By using Eq. 3, the accelerometer displacement in x direction for a certain voltage can be calculated. The effective electrostatic spring constant is as follows (Ka Nang et al., 2003):
| | (4) |
The electrostatic force is in the opposite direction of the mechanical spring force, so the actual effective spring constant is as follows:
| | (5) |
| | (6) |
Instability occurs when the actual effective spring constant is less than zero. The voltage causes the instability to occur is as follows:
| | (7) |
| | (8) |
Mechanical resonance frequency analysis: This analysis is run to obtain resonant frequency of the MEMS accelerometer. The analysis starts with DC operating point analysis running with all voltage sources set to zero and followed by frequency analysis with mechanical excitation. This analysis linearizes the models around the values that can be found from DC analysis and sweeps a frequency range to determine the frequency response. This analysis is repeated for several times by applying various DC voltages to the straight comb bottom to see the influence of DC voltage on the resonant frequency of the accelerometer. Without DC voltage applied, the resonant frequency fr of the accelerometer is given by the following equation:
| | (9) |
where, by ms is as follows:
| | (10) |
Vary analysis: In this analysis, the width and length of the beams are varied and the impact on the x resonance frequency is investigated. Theoretically, the resonance frequency should increase as the width increases and the length decreases. The resonant frequency fr of the accelerometer can be calculated by using Eq. 7 and 8.
DC transfer analysis: A DC transfer analysis is conducted by sweeping an independent source over a sweep range. During this analysis, all voltage sources are set to zero and acceleration is applied relative to x-axis of the reference frame to see its influence on the MEMS accelerometer. The displacement sensitivity Sd of the accelerometer, which is defined as the displacement of movable fingers per unit gravity acceleration, g along the sensitive direction, can be obtained by the following equation (Xingguo et al., 2005):
| | (11) |
Dimension analysis: The performance of the accelerometer depends on the dimensions of the structure. Thus, in this analysis, the number of moveable fingers for each comb has been changed to characterize its performance. The displacement of accelerometer with different voltage applied can be used as an indicator of performance. Equation 2 is used to find the displacement, while Eq. 4 and 5 were used to calculate the voltage instability occurs.
Transient analysis: In this analysis, acceleration is applied on the structure and its response in time is observed. A basic sensing electronic circuit, consists of resistor, capacitor, diode ground and Op Amp, is added to the comb drive accelerometer to produce a usable output signal.
 | |
| Fig. 5: | Schematic diagram of bandgap reference circuit |
Single-ended half-bridge capacitive sense interface is commonly used to translate the displacement into output voltage. The sensitivity of accelerometer, which is defined as the ratio of output voltage over the input acceleration, can be obtained through the transient analysis. The analysis starts with the voltage pulse value set to 1 V. The acceleration control source that used in the DC transfer analysis is replaced by a pulse. Some damping is added to the rigid plate, as it is useful to smooth the x displacement response. This amount is near the critical damping. The probe tool is used to view displacement in x direction, acceleration and output voltage Vdemod of the peak detector.
Proposed design for voltage reference: The circuit topology (Fig. 5) of the designed bandgap reference shows a current that is proportional to the absolute temperature is generated and added into the base emitter of Q3. The high gain of folded cascode amplifier (Fig. 6) forces the voltages VA= VB. The voltage difference ΔVEB between the emitter-base junctions of Q1 and Q2 is obtained using an emitter area ratio of n = 8 and equal value for currents, I. The circuit of Fig. 7 is referred to obtain ΔVEB. (Razavi, 2000).
 | (12) |
 | |
| Fig. 6: | Schematic diagram of folded cascode amplifier circuit |
Derivation of reference voltage: Knowing that voltage at node A, VA and voltage at node B, VB (Fig. 5) are equal, applying Kirchhoff’s Voltage Law (KVL) on node, B derives the following Eq. 13:
| -VB + IR1 + VEB2 = 0 | (13) |
The voltage appearing at node B is:
| VB = VEB1 | (14) |
Then the voltage across R1 can be expressed as:
| IR1 = VA - VEB2 = VEB1 - VEB2 = ΔVEB | (15) |
The output voltage reference can be written as follows:
| | (16) |
By substituting Eq. 15 into 16 results the reference voltage:
 | |
| Fig. 7: | Generation of proportional to absolute temperature (PTAT) voltage |
 | |
 | |
 | |
| Fig. 8: | (a) VEB3 versus temperature (T), (b) R1/R2 VT ln (n) versus temperature (T) and (c) Vref versus temperature (T) |
| | (17) |
In practice, k is the ratio of R2/R1 and VEB is negatively PTAT while VT has a positive temperature coefficient. The temperature coefficient can be zero by getting a proper value of k. Equation 17 can be shown in Fig. 8. The negative slope, -m of VEB3 (Fig. 8a) over the temperature range is obtained by simulation. It is followed by getting the exact values of R1 and R2 to ascertain the slope, m (Fig. 8b). The PTAT voltage increases linearly with temperature, thereby efficiently cancelling the effect of the negative linear temperature of the base emitter voltage (Rincon and Alfonso, 2001). By summing the emitter-base voltage and PTAT voltage results slope equal to zero for Vref over the temperature range (Fig. 8c).
RESULTS AND DISCUSSION
DC operating point analysis: The displacement of the accelerometer increases with the increase in voltage (Fig. 9). When a DC voltage is applied to the fixed fingers, electrostatic force is generated on the proof mass. It will change the actual effective spring constant of the accelerometer from its mechanical value. The lateral electrostatic force may lead to instability if it increases more rapidly than the restoring lateral elastic force. The instability will cause the movable fingers to move laterally and collapsed to the fixed fingers. The pattern agrees with hand derived calculation and FEM. The voltage instability occurred between 2.4 and 2.45 V.
Mechanical resonance frequency analysis: The resonant frequency decreases with the increase in applied voltage (Fig. 10) due to the actual effective spring constant decreases when the voltage increases. The results notice that the deviation of the calculated resonant frequency from Architect simulation is small, which is less than 0.2%. However, the resonant frequency difference between calculation value and FEM analysis result is greater, which is in between 0.16 to 6.1%. The resonant frequency drops when the voltage rises.
Vary analysis: In this analysis, dimension of the beams is varied and the impact on the x resonance frequency is investigated. The beam width, Wb is varied from 2 to 8 μm while the beam length, Lb is varied from 246 to 396 μm. The result shows that the resonance frequency increases with the decrease in beam length and increase in beam width (Fig. 11, 12). The pattern agrees with all results from calculation, Architect analysis and FEM analysis. The deviation of the calculated resonant frequency from Architect analysis result is small, which is less than 0.7%.
 | |
| Fig. 9: | DC operating point analysis of MEMS accelerometer up to 2.5 V |
 | |
| Fig. 10: | Mechanical resonance frequency analysis up to 2 V |
 | |
| Fig. 11: | Vary analysis on the beam length |
However, the difference between calculation value and FEM analysis result is greater, which is between 0.8 and 3.4%.
DC transfer analysis: The acceleration is applied in x direction in the range of 0 to 686.7 m sec-2. The result shows the displacement of the accelerometer is directly proportional to the acceleration applied (Fig. 13).
 | |
| Fig. 12: | Vary analysis on the beam width |
 | |
| Fig. 13: | Displacement of the accelerometer versus applied acceleration |
 | |
| Fig. 14: | Displacement of the accelerometer with respect to voltage applied |
The analytical result of the displacement sensitivity is 23.775 nm g-1, while in simulation is 23.713 nm g-1.
Dimension analysis: In this analysis, the number of movable fingers has been reduced to 60. The result shows that the displacement decreases with the increase voltage. The critical voltage where the instability occurs is between 3.1 and 3.15 V (Fig. 14). This is greater than the critical voltage of 100 movable fingers.
 | |
| Fig. 15: | Resonant frequency for 100 of movable finger |
 | |
| Fig. 16: | Resonant frequency for 60 of movable finger |
The resonant frequency increases from 3238.2 to 3673.0 Hz (Fig. 15, 16) due to the decrease of sensing mass.
Transient analysis: The result shows that the displacement increases with the increase in acceleration (Table 1, 2). The largest acceleration that the accelerometer can detect before instabilities occur is about 48 g. The displacement and demodulated signal for this situation are 1.3487 μm and 54.535 V, respectively. The deviation of modulated signal from calculation values and Architect simulation values is at about 2.7%.
Voltage reference simulation: Various simulations were performed in a standard 0.13 μm CMOS process to analyze the effects of the process variation on the generated voltage reference in five different process corners including TT (Typical), SS (Slow-Slow), FF (Fast-Fast), FS (Fast-Slow) and SF (Slow-Fast).
| Table 1: | Transient analysis of MEMS accelerometer using calculation |
 | |
| Table 2: | Transient analysis of MEMS accelerometer using architect simulation |
 | |
| Table 3: | Variation in voltage reference for all process corners |
 | |
 | |
| Fig. 17: | Temperature variation of the output voltage of the BGR at typical condition |
The reference voltage over temperature at typical condition and in all process corners is shown in Fig. 17 and 18, respectively. The summary of variation is shown in Table 3. The output reference exhibits ± 0.614 mV variation from the mean value when the supply changes from 2.25 to 2.75 V (Fig. 19). The design achieves a maximum PSRR of -49.03 dB for frequency less than 18.5 kHz (Fig. 20). It is obvious that the proposed design achieves a small chip area, low peak-to-peak output variation for typical condition and high PSRR (Table 4).
 | |
| Fig. 18: | Simulation result of the voltage reference vs. temperature in all process corner |
 | |
| Fig. 19: | Supply voltage variation of the output voltage of the BGR |
 | |
| Fig. 20: | Simulation result of PSRR of the proposed design at room temperature with 2.5 V supply |
| Table 4: | Summary of the performance of the proposed BGR |
 | |
CONCLUSION
Design, simulation and analysis of capacitive comb drive MEMS accelerometer using commercial software Coventorware® 2006 were presented in this current study. The structure uses proof mass suspended by four straight beams and interdigitated combs are used for driving the structure, as well as sensing capacitors to provide differential capacitance measurement. An analysis on the DC operating point, mechanical resonance frequency, vary, DC transfer and transient has been presented and discussed. A simplified analytical model to explain the analysis is also presented. The results obtained by simulation were in close agreement with the analytical results.
A very low voltage variation in BGR has also been presented. The proposed design produces an output voltage reference of 1.175837 over a temperature range from -50 to 150°C. The reference voltage has a variation of ± 0.36 mV with temperature and exhibits ± 0.614 mV variation from the mean value when the supply changes from 2.25 to 2.75 V. The design achieved a maximum PSRR of -49 dB for frequency less than 18.5 kHz.
ACKNOWLEDGMENTS
The authors would like to express sincere appreciation of the assistance of Mr. Mohd Kusairay Musa and Mr. Faisal Mohamad for his co-operation and assistance in providing support of the software. To Mr. Fazlan, Mr. Sanusi, Mr. Zamri and Puan Rohana, thanks for their kind help. Financial support from the Universiti Sains Malaysia Short Term Grant, 304/PELECT/6035301 is gratefully acknowledged.
NOMENCLATURE
| η | : | No. of movable fingers |
| ε0 | : | The permittivity of free space |
| εr | : | The relative permittivity of the dielectric |
| h | : | Thickness of the accelerometer |
| V | : | Voltage applied to the Straight Comb Bottom |
| y0 | : | Initial capacitor length |
| y | : | Displacement in Y direction |
| x+ | : | Initial lateral gap |
| x¯ | : | Initial lateral gap |
| x | : | Displacement in X direction |
| kmech | : | Mechanical spring constant |
| E | : | Young’s modulus of silicon |
| h | : | Thickness of the accelerometer |
| wb | : | Beam width |
| Lb | : | Beam length |
| Wm | : | Width of the rigid plate |
| Lm | : | Length of the rigid plate |
| Wf | : | Finger width |
| Lf | : | Finger length |
| ηx | : | No. of perforation holes in x direction |
| ηy | : | No. of perforation holes in y direction |
| H | : | Distance between the perforation holes in x and y directions |
| ρ | : | Density of silicon |
| mS | : | Sensing mass |
| g | : | Acceleration due to gravity |
| k | : | Boltzmann’s constant |
| q | : | Electron charge |
| T | : | Absolute temperature |
| n | : | Emitter area |
REFERENCES
- Chih-Ming, S., W. Chuanwei and F. Weileun, 2008. On the sensitivity improvement of CMOS capacitive accelerometer. Sensors Actuators A Physical, 141: 347-352.
CrossRef - Haronian, D., 2000. A low-cost micromechanical accelerometer with integrated solid-state sensor. Sensors Actuators A Physical, 84: 149-155.
CrossRef - Islam, M.F., M.A.M. Ali and B.Y. Majlis, 2008. RF MEMS-based tunable filter for X-band applications. J. Applied Sci., 8: 189-191.
CrossRefDirect Link - John, K.C., H.J.F. Colin, M.W. Stewart and R.M. Alan, 2008. Application of optimal and robust design methods to a MEMS accelerometer. Sensors Actuators A Physical, 142: 88-96.
CrossRefDirect Link - Josselin, V., P. Touboul and R. Kielbasa, 1999. Capacitive detection scheme for space accelerometers applications. Sensors Actuators A Physical, 78: 92-98.
CrossRef - Chae, J., H. Kulah and K. Najafi, 2005. A monolithic three-axis micro-g micromachined silicon capacitive accelerometer. J. Microelectromech. Syst., 14: 235-242.
CrossRef - Ka Nang, L., P.K.T. Mok and L. Chi Yat, 2003. A 2-V 23 µA 5.3 ppm/�°C curvature-compensated CMOS bandgap voltage reference. IEEE J. Solid State Circuits, 38: 561-564.
CrossRef - Krishnamoorthy, U., R.H. Olsson, G.R. Bogart, M.S. Baker, D.W. Carr, T.P. Swiler and P.J. Clews, 2008. In-plane MEMS-based nano-g accelerometer with sub-wavelength optical resonant sensor. Sensors Actuators A Physical, 145-146: 283-290.
CrossRef - Rasoul, D. and S.M. Atarodi, 2003. A new low voltage precision CMOS current reference with no external components. IEEE Trans. Circuits Syst. Analog Digital Signal Process., 50: 928-932.
CrossRef - Seiji, A., K. Sho, Y. Daiichiro and I. Yuichi, 2007. Surface micromachined accelerometer using ferroelectric substrate. Sensors Actuators A Physical, 139: 88-94.
CrossRef - Vivek, A., T.K. Bhattacharayya and S. Banik, 2006. Design steps for bulk micro machined single axis silicon capacitive accelerometer with optimized device dimensions. J. Physics Int. MEMS Conf., 34: 722-727.
Direct Link