
N.H.M. Kamrujjaman Serker
Department of Urban and Civil Engineering, Ibaraki University, 4-12-1, Naka Narusawa, Hitachi, Ibaraki, 316-8511, Japan
Z.S. Wu
Department of Urban and Civil Engineering, Ibaraki University, 4-12-1, Naka Narusawa, Hitachi, Ibaraki, 316-8511, Japan
Journal of Applied Sciences
Year: 2009 | Volume: 9 | Issue: 7 | Page No.: 1276-1284







ABSTRACT
In this study, a damage identification technique based on the distributed Macro-Strain (MS) response measurements is presented. The fundamental concept of the proposed technique is that the ratio of the strain measured at a target location and a reference location of a beam-like structure is constant for a given condition of the structure. The proposed damage identification technique was verified using the laboratory experimental results. In addition, noise was added to the measured response to simulate the real field condition. The proposed technique was able to identify damage in a noise-polluted environment. The proposed technique was also applied for the health monitoring of a highway bridge in Japan. Long-gage distributed sensors were deployed to collect the traffic induced strain responses. Results from the onsite experiment show the potentials of the proposed technique for practical application.
PDF Abstract XML References Citation
How to cite this article
N.H.M. Kamrujjaman Serker and Z.S. Wu, 2009. Structural Health Monitoring Using Distributed Macro-Strain Response. Journal of Applied Sciences, 9: 1276-1284.
DOI: 10.3923/jas.2009.1276.1284
URL: https://scialert.net/abstract/?doi=jas.2009.1276.1284
DOI: 10.3923/jas.2009.1276.1284
URL: https://scialert.net/abstract/?doi=jas.2009.1276.1284
INTRODUCTION
In recent years, the damage identification in structures has drawn wide attention from various engineering fields. As a result, numerous damage identification techniques have been proposed. Generally, the existing approaches proposed in this area can be classified into two major categories-the static identification methods using static test data and the dynamic identification methods using dynamic test data. Compared with the static identification techniques, the dynamic ones have been developed more maturely and the corresponding literature are quite extensive. A detail review on the dynamic identification techniques can be found in Doebling et al. (1998), Carden and Fanning (2004) and Montalovao et al. (2006). In most of the vibration based damage identification techniques, structural modal parameters such as modal frequencies and damping ratios, mode shapes etc., are used. Similarly, most of the static test based damage identification techniques utilize static displacement and strain (Hajela and Soerio, 1989; Sanayei and Onipede, 1991; Hjelmstad and Shin, 1997; Liu, 1996; Choi et al., 2004; Caddemi and Morassi, 2007) and the health status of the intact structure is a prerequisite. Therefore, different types of data such as accelerations, velocities and displacements are measured under various excitations for damage identification. Moreover, conventional measurements such as accelerations, velocities and displacements are essentially point measurements at translational DOF. Among these measurements, strain may be the most sensitive to local damage and can be a good candidate measurement for detecting a local damage. One of the significant limitations of the point measurement is that it may not reflect a local damage unless the area where the sensor is fixed exactly covers the damaged region. Since, the traditional foil strain gages have very small gage length compared to the length of the structure to be monitored, it will be unwise and expensive to use a large number of sensors to cover the whole structure or important parts. Sensors having distributed sensing capability can be a good choice to overcome this limitation in detecting damage or monitoring large civil structures.
In recent days, fiber optic sensing technology has opened the door of distributed sensing with a gage length up to several meters (Li and Wu, 2007). Among the fiber optic sensors, Fiber Bragg Grating (FBG) based strain sensors are most suitable with its special features of high precision level, stable sensing capacity, reliability and so on. Li and Wu (2007) developed a long-gage FBG sensor which can be used to measure the structural response distributedly by placing the sensors in series. Serker and Wu (2007) proposed a damage detection technique which focuses the application of the distributed static strain response. This study focuses on the application of the distributed macro-strain response to detect and localize damage in beam-like structures. A macro-strain based damage identification technique is presented to this purpose. With the proposed technique, damage detection can be accomplished with no requirement for an analytical model and/or health condition of the intact or undamaged structure.
DAMAGE IDENTIFICATION USING STRAIN RESPONSE DATA
Bending strain of a beam-like structure (Fig. 1) at any location x from reference can be calculated as:
(1) |
where, Mx is the bending moment at section x, y is the distance between the target point and the neutral axis of the beam. E and I have their usual meaning.
For an intact beam the stress or strain at any section solely depends on the magnitude of the moment. For a given configuration and a set of loads, moment at any section depends on the distance measured from a reference section. Therefore, the ratio of the strain between two measurement locations for a given loading configuration is independent of the magnitude of the load and constant. However, the ratio of strain between two measurement locations will be changed if any one of the sections is damaged. The change in the strain ratio will depend on the stiffness reduction of the corresponding section of the beam. Thus this ratio can help detect and quantify the damage.
Damage localization: Consider the simple supported beam shown in Fig. 1 with a point load applied at a distance LP from the left support. Bending strain at any section xi:
(2) |
where, RL is the left support reaction. Similarly, the strain at any reference location, xR, can be written as:
(3) |
Using Eq. 2 and 3, strain-ratio between these two locations can be found as:
(4) |
From Eq. 4, it is clear that for a given configuration of load the ratio of the strain between two measurement locations is equal to the ratio of the distances measured from the same reference point.
 | |
| Fig. 1: | Basic concept of the strain ratio approach |
For other measurement locations similar strain ratios can be obtained as:
(5) |
These strain ratios are all independent quantities and remain constant for the same loading configuration with varying amplitude of the applied load. If the damage of an element is defined as a reduction of the flexural rigidity, the damage can be expressed as follows:
(6) |
where, E*I* and EI are the flexural rigidity of an element under damaged and undamaged states, respectively. Here, β (0 ≤ β ≤ 1) is the ratio of the effective flexural rigidity at damaged and intact conditions. β is 1 with no damage and zero with complete damage in the element.
The strain at any damaged section xi from the left support can be written as:
(7) |
The strain ratio between the damaged section and the undamaged reference section can be written using Eq. 3 and 7 as:
(8) |
where, ![]() is the strain ratio between the damaged section and the reference section.
is the strain ratio between the damaged section and the reference section.
From Eq. 4 and 8 it is obvious that the strain ratio value changes as the measurement location encounters damage. In practice, the target structures may not be found in undamaged condition which demands some alternative to have the intact state response e.g., FEM. The above mentioned technique does not require any reference data of the undamaged structure. Sensor configuration information can be utilized as the substitution to the intact condition information.
Damage quantification: From Eq. 8 the value of β can be obtained as:
(9) |
Where:
(10) |
is the location ratio which can be found from the sensor configuration and ![]() can be found from the measurement data.
can be found from the measurement data.
APPLICATION IN CIVIL SHM
The earlier described concept of damage detection will be applied to SHM considering that the structure to be monitored is instrumented with a series of long-gage distributed sensors. The damage detection strategy is shown graphically in Fig. 2. In this approach, Macro-Strain (MS) response data will be measured at different time instants under ambient traffic loading and structural response is considered to be dominated by static effect. The macro strain is the average strain over a long-gage sensor. The macro-strain, ![]() , over any sensor with a gage length Li, can be obtained from the rotational displacement with a reasonable assumption that at each element, the distance from the inertia axis to the bottom of the beam where, sensors are to be installed is the same (Li and Wu, 2007):
, over any sensor with a gage length Li, can be obtained from the rotational displacement with a reasonable assumption that at each element, the distance from the inertia axis to the bottom of the beam where, sensors are to be installed is the same (Li and Wu, 2007):
(11) |
where, hi is the distance measured from the neutral axis of the beam to the sensor location. θiR and θiL are the rotational displacements of the ith element at right and left node, respectively.
Next, the measured macro-strain of different sensors will be plotted against that of a reference sensor. It is obvious from Eq. 4 that all points of the feature plot will lay on a line for every condition of the structure and any point lying above the line can be treated as a critical event. However, every structure experiences the varying operational and environmental condition during its life which may cause some variation in the extracted features. It is considered that only the structural damages can cause a significant and permanent change in the local as well as global behavior of the structure. Therefore, for a damaged section the strain-ratio line will shift to a new position and continue to shift for a progressive damage. Statistical approaches can be incorporated to account for the variability in the measured responses due to changing environmental condition.
 | |
| Fig. 2: | Application of the proposed damage identification technique in civil SHM |
Let the extracted features of a target zone and the reference zone for a set of measurements follow a linear variation and can be expressed as:
MTarget = a1xMReference | (12) |
where, a1 is the slope of the regression, MTarget and MReference are the extracted features from a target zone and a reference zone, respectively. Let the statistical model for another set of measurements for the same zone be:
MTarget = a2xMReference | (13) |
From Eq. 8, it is obvious that damage causes an increase in the value of the strain ratio. Therefore, damage is likely to be present if a2 > a1.
EXPERIMENTAL TESTS
The experimental beam with sensor configuration is shown in Fig. 3. The beam was subdivided into 10 zones and 10 FBG sensors of 200 mm gage length were deployed to capture the macro-strain over each zone. Single damage was introduced by reducing the thickness of some part of zone 4. Details of the damage are shown in Fig. 3. A single point load of increasing amplitude (30, 50, 75, 100 and 125 N) was applied at each node between nodes 3 and 8. Applied loading configuration was the same for both the intact and damaged beams. Macro-strains for each load step was recorded and stored in a PC. Since, the data was collected in a laboratory environment, it can not reflect the variation of the measured responses due to noise, environmental changes, etc. Therefore, simulated noise was added to each of the measurement in the following form:
 | |
| Fig. 3: | Experimental specimen and detail of sensor placement |
 | |
| Fig. 4: | Comparison of the DI of intact beam |
(14) |
where, ![]() is the macro strain measured at sensor i, λ (0, 1) is a random Gaussian variable with zero-mean and unitary standard deviation and β is the noise amplitude. Five percent noise (β = 0.05) was added to the measured response.
is the macro strain measured at sensor i, λ (0, 1) is a random Gaussian variable with zero-mean and unitary standard deviation and β is the noise amplitude. Five percent noise (β = 0.05) was added to the measured response.
Experimental results: Macro Strain-Ratio (MSR), which has been denoted as the Damage Index (DI), was extracted from the noise polluted data. Evaluated MSR for both the intact and damaged beams are shown in Fig. 4a-h and 5 and their statistics are shown in Table 1. The location ratio was indicated as the analytical DI and was used as the reference for damage identification.
 | |
| Fig. 5: | Damage identification results |
| Table 1: | Statistics of the evaluated damage indices |
 | |
DI having values lower than or equal to the reference DI will indicate the intact condition where as DI value greater than the reference DI will indicate the damaged condition.
It is obvious from Fig. 4 that the evaluated damage indices are very close to the reference DI. In some cases, the evaluated DI is higher than the reference DI and can be treated as a damage event. The proposed damage detection technique considers a set of measurement data instead of using individual measurement data. Therefore, the average value of the evaluated DI should be compared for decision making. As it can bee shown from Table 1 that the average value of the evaluated DI of the intact beam are always smaller than the reference DI but very close to the reference DI. Standard Deviation (SD) and Coefficient of Variation (COV) were found to be reasonably small indicating the consistency of the evaluated DI.
It is obvious from Fig. 5c that MSR of element 4 lay on the upper side of the reference line. Therefore, damage can easily be identified and localized. It is also clear from Fig. 5a-h that DI values of all other elements for different loading conditions fall on the lower side of the reference line which indicates the intactness of the corresponding sections. Mean value, SD and COV of the evaluated DI are shown in Table 1. It is obvious from the tabulated results that the evaluated DI have very good consistency even after the addition of noise in to the measured response.
EXPERIMENTAL RESULTS FROM KAWANE BRIDGE
Description of Kawane Bridge: The Kawane Bridge, shown in Fig. 6a, b, is located near Mito City in Ibraki Prefecture, Japan. It is approximately aligned in the North and South direction.
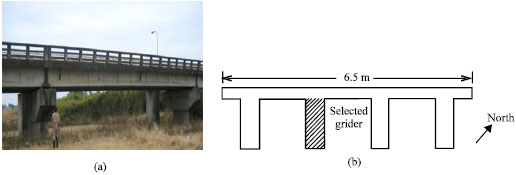 | |
| Fig. 6: | (a) A view of the Kawane Bridge and (b) cross section of the bridge |
 | |
| Fig. 7: | Sensor configuration of Kawane Bridge experiment |
This RC bridge, constructed in 1963, has six independent spans and each span consists of a concrete deck supported by four girders. The roadway, carrying two traffic lanes, in a span is 6.5 m wide and 21.3 m long. Along the length of each span, five cross-beams are equally spaced. No damage was observed during the visual inspection of the bridge. To investigate the effectiveness of the proposed damage identification technique, the measurement data on Kawane Bridge is considered for assessment.
Experimental setup and data collection: Six long-gage FBG sensors of gage-length of 1 m have been installed on one interior girder of the bridge. Details of the sensor installation are shown in Fig. 7. Responses due to the normal traffic operation were recorded in a PC. The bridge is located on the approach road to an expressway. Therefore, the traffic is significantly composed of passenger cars, though the bridge also serves for heavy trucks. Response data due to movement of passenger cars as well as small and heavy trucks was collected randomly. In addition, the collected response was due to the vehicles on just each lane as well as on both lanes. The sampling rate of data collection was different for different days. The sampling frequency was between 250 and 1000 Hz. The first data set was collected on August 19, 2008. The second and third data set were obtained, respectively on September 17 and 18, 2008. The first and second data collection days were clear and sunny. The weather on the third data collection day was different and it was raining during the data collection period. Air temperature was recorded using a digital thermometer. The average temperature on the 1st, 2nd and 3rd data collection day was recorded as 27.3, 26.4 and 23.3 °C, respectively.
Experimental results: One important issue with the dynamic test data is the selection of representative data. From the static test data it was observed that the method works well when the load is applied at the midspan of the beam. Therefore, this feature was considered to select the representative data from a particular strain-time series. For a particular response data peak strain from the sensor located close to the midspan was selected first as the representative data. Time instant for this peak strain was used as the reference time for the selection of macro-strain from the time series data of other sensors. The feature selection criterion is shown in Fig. 8a, b.
 | |
| Fig. 8: | (a) Beam with distributed sensors and (b) macro-strain time series data from different sensors under ambient excitations |
 | |
| Fig. 9: | (a) Typical macro strain responses and (b) comparison of the average maximum strains obtained from the static and dynamic test under the test bus |
By considering such kind of feature selection criteria due to the strain response under the moving traffic load is essentially be dominated by the static effect rather than the dynamic effect. In fact, this assumption will limit the application of the proposed damage identification technique to certain types of structures where the response of the structure due to the moving traffic is primarily dominated by the static effect. A test bus with a total weight of 9740 kg was run to verify this assumption. Total weight on the rear and front axles was 7090 and 2650 kg, respectively. In addition, static strain due to the weight of the bus was measured. Typical strain time series due to the test bus is shown in Fig. 9a. Figure 9b shows the maximum strain responses measured when the bus was running at speed of 30 kmph along with the static strain responses. It is obvious from Fig. 9b that the average maximum strain due to the moving bus is very close to the static strain. Next, the features from the measured responses due to ambient traffic were selected and shown in Fig. 10.
 | |
| Fig. 10: | Monitoring results of grider-B |
| Table 2: | Slope and R2 values for different sensing zones |
 | |
Sensor BF7 was selected as the reference sensor. The slopes and R2 values of the fit lines of different data sets are shown in Table 2. It is obvious from Table 2 that the extracted features from different sensors are in well agreement with that of the reference sensor. By considering the measurement data of August 19, 2008 as the reference data set, the corresponding fit lines regarded as the reference to make some comparison among the results extracted from three different data sets. From Fig. 10a-e and Table 2, it can be seen that there is no significant change in the slope of the fit lines of different zones. However, slight frequency shifts were observed from day to day measurements. Visual inspection reveals no damage in the bridge. Therefore, the shifting of the first mode frequency is due to the environmental changes. It is noticeable that the third data set was collected on a rainy day. Since, no significant variation in the measured slope of the fit lines is observed, it can be said that the proposed damage identification approach can accommodate the changing environmental conditions.
CONCLUSION
In this study, an approach to identify damage of beam-like structures using the distributed strain response has been presented. Laboratory controlled experimental data was used to verify the proposed damage identification technique. Effect of noise on the measured response was also taken into consideration and the proposed technique was verified with the noise-polluted data. Long-gage FBG sensors were deployed to collect the static strain response. Statistics of the evaluated DI shows the consistency of the measured responses as well as the damage identification capability of the proposed technique in a noise-polluted environment. Next, the proposed technique was applied for the SHM of a highway bridge in Japan using the output-only nature data. A significant variation in environment was observed during the experiment. Experimental results show that the proposed technique has the potential for the application of civil SHM. In addition, the environmental changes can easily be incorporated in to the damage identification process without measuring.
REFERENCES
- Caddemi, S. and A. Morassi, 2007. Crack detection in elastic beams by static measurements. Int. J. Solids Struct., 44: 5301-5315.
CrossRef - Carden, E.P. and P. Fanning, 2004. Vibration based condition monitoring: A review. Struct. Health Monitor., 3: 355-377.
CrossRefDirect Link - Choi, I.Y., J.S. Lee, E. Choi and H.N. Cho, 2004. Development of elastic damage load theorem for damage detection in a statically determinate beam. Comput. Struct., 82: 2483-2492.
CrossRef - Doebling, S.W., C.R. Farrar and M.B. Prime, 1998. A summary review of damage identification methods that examine changes in dynamic properties. Shock Vibration Digest, 30: 91-105.
CrossRefDirect Link - Hajela, P. and F.J. Soeiro, 1989. Structural damage detection based on static and modal analysis. Am. Inst. Aeronaut. Astronaut. J., 28: 1110-1115.
CrossRef - Hjelmstad, K.D. and S. Shin, 1997. Damage detection and assessment of structures from static response. Eng. Mech., 123: 568-576.
CrossRef - Li, S.Z. and Z.S. Wu, 2007. Development of distributed long-gage fiber optic sensing system for structural health monitoring. Struct. Health Monitor., 6: 133-143.
CrossRefDirect Link - Liu, P.L., 1996. Parametric identification of plane frames using static strain. Proc. R. Soc. Lond. A., 452: 29-45.
CrossRefDirect Link - Montalovao, D., N.M.M. Maia and A.M.R. Riberio, 2006. A review of vibration-based structural health monitoring with special emphasis on composite materials. Shock Vibration Digest, 38: 295-324.
CrossRefDirect Link - Sanayei, M. and O. Onipede, 1991. Damage assessment of structures using static test data. AIAA J., 29: 1174-1179.
CrossRefDirect Link