
I. Khatami
Department of Mechanical Engineering, Mazandaran University, P.O. Box 484, Babol, Iran
N. Tolou
Department of Engineering, Islamic Azad University, Ayatollah Amoly Branch, P.O. Box 678, Amol, Iran
J. Mahmoudi
Department of Mechanical Engineering, K.N. Toosi University of Technology, Tehran, Iran
M. Rezvani
Department of Mechanical Engineering, K.N. Toosi University of Technology, Tehran, Iran
Journal of Applied Sciences
Year: 2008 | Volume: 8 | Issue: 5 | Page No.: 848-853







ABSTRACT
The present study is motivated by the desire to investigate the analytical solutions of fully developed shock wave equation by the implementation two new methods, called Homotopy Analysis Method (HAM) and Variational Iteration Method (VIM). The HAM eliminated the classical perturbation method problem, because of the existence a small parameter in the equation. VIM is on of the most effective and convenient ones for both linear and nonlinear equations. The obtained results from the proposed approximate solutions have been compared and verified with those of Adomian`s Decomposition Method (ADM) and the Runge-Kutta`s algorithm (RK). It shows that the numerical results of these methods are the same; while HAM can be much easier, more convenient and more efficient to approach such problems in comparison to VIM and other Traditional methods.
PDF Abstract XML References Citation
How to cite this article
I. Khatami, N. Tolou, J. Mahmoudi and M. Rezvani, 2008. Application of Homotopy Analysis Method and Variational Iteration Method for Shock Wave Equation. Journal of Applied Sciences, 8: 848-853.
DOI: 10.3923/jas.2008.848.853
URL: https://scialert.net/abstract/?doi=jas.2008.848.853
DOI: 10.3923/jas.2008.848.853
URL: https://scialert.net/abstract/?doi=jas.2008.848.853
INTRODUCTION
Nonlinear phenomena play a crucial role in applied mathematics and physics. These phenomenons can be described by the means of their nonlinear governing equations if those are valid, so happens in shock waves. The shock waves appear in explosion, traffic flow, glacier waves and airplanes breaking the sound barrier and so on with partial nonlinear differential equation form. The analytical solution of the nonlinear equations of such nonlinear phenomena can help the authors know the described process deeply but except a limited number, most of them do not have precise analytical solutions. Therefore, these nonlinear equations are to be solved using other methods. In recent decades, numerical analysis (Burden and Faires, 1993) has remarkably developed for nonlinear partial equations related to fully developed shock wave equation. Also there are many standard semi-exact analytical methods for solving nonlinear partial differential equations; for instance, Backland transformation method (Rogers and Shadwich, 1982), Lie group method (Olver, 1986), Adomian’s decomposition method (Adomian, 1988) and variational iteration method. But as numerical calculation methods were improving, semi-exact analytical methods were, too. Most scientists believe that the combination of numerical and semi-exact analytical methods can also end with remarkable results. Homotopy Analysis Method (HAM) is one of the well-known and resent methods to solve the nonlinear equations, which was introduced by Liao (1992, 1995, 1997, 1999, 2003, 2004, 2005). This method eliminated the classical perturbation method problem, because of the existence a small parameter in the equation.
Recently, Allan and Al-Khaled, (in press) applied ADM solution for shock wave equation and achieved better results compared to numerical approaches (Allan and Al-Khaled, 2007). In this survey, we extend this work by applying HAM and VIM which are one of the latest analytical methods for solving linear and nonlinear equations to analysis the shock wave equation.
BASIC OF THE HE’S VARIATIONAL ITERATION METHOD (VIM)
To clarify the basic ideas of VIM, we consider the following differential equation:
| (1) |
where, L is a linear operator, N a nonlinear operator and g(t) an inhomogeneous term.
According to VIM, we can write down a correction functional as follows:
| (2) |
where, λ is a general lagrangian multiplier which can be identified optimally via the variational theory Liao (1999, 2005). The subscript n indicates the nth approximation and ![]() is considered as a restricted variation (He, 1997, 1998a, b, 1999), i.e.,
is considered as a restricted variation (He, 1997, 1998a, b, 1999), i.e.,![]() .
.
BASIC OF THE LIAO’S HOMOTOPY ANALYSIS METHOD (HAM)
Consider the following differential equation (Liao, 1992, 1995, 1997, 1999, 2003, 2004, 2005):
| (3) |
where, N is a nonlinear operator, τ denotes an independent variable, u(τ) is an unknown function. For simplicity, we ignore all boundary or initial conditions, which can be treated in the similar way. By means of generalizing the traditional homotopy method, Liao (2003) constructed the so-called zero-order deformation equation as:
| (4) |
where, pε[0, 1] is the embedding parameter, h≠0 a nonzero auxiliary parameter, h(τ)≠0 an auxiliary function, L an auxiliary linear operator, μ0(τ) an initial guess of μ(τ) and φ(τ; p) is an unknown function. It is important to have enough freedom to choose auxiliary unknowns in HAM. Obviously, when p = 0 and p = 1 it holds:
Thus, as p increases from 0 to 1, the solution φ(τ; p) varies from the initial guess μ0(τ) to the solution μ(τ). Expanding φ(τ; p) in Taylor series with respect to p, we have:
| (5) |
Where:
 | (6) |
If the auxiliary linear operator, the initial guess, the auxiliary parameter h and the auxiliary function are quite properly chosen, the series of Eq. 5 converges at p = 1 then we have:
| (7) |
This must be one of the solutions of the original nonlinear equation, as proved by He (1997). While h = -1 and H(τ) = 1, Eq. 4 becomes:
| (8) |
This is mostly used in Homotopy Perturbation Method (HPM); whereas the solution can be obtained directly without using Taylor series (He, 2006).
According to the Eq. 5, the governing equation can be deduced from the zero-order deformation Eq. 4. The vector is defined as:
Differentiating Eq. 4 for m times with respect to the embedding parameter p, then setting p = 0 and finally dividing them by m, we will have the so-called mth order deformation equation as:
| (9) |
Where:
 | (10) |
And
 |
It should be emphasized that um(τ) for m≥1 is governed by the linear Eq. 8 with the linear boundary conditions coming from the original problem, which can be easily solved using symbolic computation software.
APPLICATIONS
In the following, we apply HAM and VIM to solve shock wave equation.
The shock wave equation which describes the flow of most gases is given by Chow (1979), Al-Khled (1996) and Smaller (1983):
| (11) |
where, c0, γ are constant and γ is the specific heat. Study the case under c0 = 2 and γ = 3/2 which corresponds to the flow of air, results to the following shock wave equation:
| (12) |
And the initial condition is assumed to be:
| (13) |
Implementation of VIM: In order to solve Eq. 12 by means of VIM, we construct a correction functional, as follows:
 | (14) |
The Lagrange multiplier can therefore be simply identified as λ = 1 and the following iteration formula can be obtained:
 | (15) |
Now we start with an arbitrary initial approximation that satisfies the initial conditions, as follows:
By the above iteration formula (15) we can obtain the other components as follows:
 | (16) |
In the same manner the rest of components of the iteration formula Eq. 15 can be obtained. The excellent agreement between the solution of Eq. 12 which is obtained from VIM after three iterations and the Runge-Kutta’s algorithm will be shown in results and discussion.
Implementation of HAM: Now we apply homotopy analysis method Eq. 4 to 12. We construct a homotopy in the following form:
 | (17) |
Consider Eq. 17 and let us solve them through HAM with proper assignment of H(τ) = 1 subject to the initial condition and assuming m = 2.
By two times derivation of Eq. 17 with respect to the p, two equations will be obtained. Consider the following equation:
 | (18) |
Substitution Eq. 18 into both of them, we have following equations:
 | (19) |
 | (20) |
Subject to the boundary condition (13) gives us:
| (21) |
| (22) |
 | (23) |
 | (24) |
Further from Eq. 24 it will be shown that HAM requires only two steps to achieve accurate results.
RESULTS AND DISCUSSION
In this study, the shock wave equation is solved using HAM and VIM. The result shown in Fig. 1-4 indicates that both methods experience a high accuracy. In addition, in comparison with most other analytical methods, a considerable reduction of the volume of the calculation can be seen in both propose method especially for the HAM. It can be approved that HPM and VIM are powerful and efficient techniques in finding analytical solutions for a wide classes of nonlinear problems.
The behavior of the solution of Eq. 12 obtained from the Runge-Kutta’s algorithm is shown in Fig. 1. Also the result of the HAM and VIM are depicted in Fig. 2a and b, respectively. These figures show obviously the excellent agreement between proposed methods and the Runge-Kutta’s method.
For further verification, the surface error of the HAM and VIM solutions (Fig. 2) with respect to the results obtained from Runge-Kutta’s algorithm (Fig. 1) are shown in Fig 3a and b. Also the surface error of HAM for t = 2s and h = -0.6 is showed in Fig 3c.
Here we studied and compared the diagram of the results obtained from HAM for h = -0.5, h = -1, h = -2 in comparison with the results obtained from Runge-Kutta’s algorithm and VIM. Also the results obtained from HAM for different value of h, VIM and the Runge-Kutta’s method is shown in Fig. 4a-c in 2D space for t = ls. For better understanding of the efficiency of the proposed methods, the results from ADM solution (Allan and Al-Khaled, 2007) is shown and compared to the previous ones in Fig. 4d. As we can see; the results obtained from HAM for h = -1 are closer to the results obtained from Runge-Kutta’s algorithm than other values of h (Fig. 4a-d) also HAM experiences more accurate results.
 | |
| Fig. 1: | Behavior of solution obtained from Runge-Kutta’s algorithm |
  | |
| Fig. 2: | Behavior of solutions obtained by: HAM (a), VIM (b) |
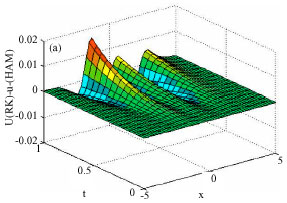
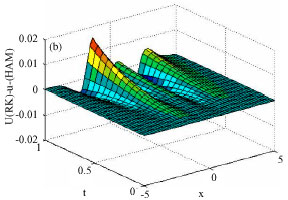
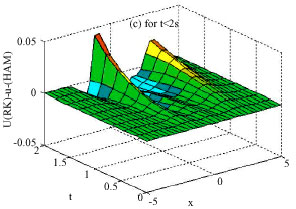
| Fig. 3: | Surface error of solutions obtained by: HAM (a, c), VIM (b) Error = U(RK)-u(solution) |
| Fig. 4: | Comparison of the results with auxiliary parameter variation |
CONCLUSIONS
In this study, we have successfully developed HAM and VIM for shock wave equation. The results obtained from the proposed method are in good agreed well with those obtained from the Runge-Kutta’s algorithm and ADM. It is apparently seen that HAM and VIM are very powerful and efficient techniques in finding analytical solutions for wide classes of nonlinear problems. It is worth pointing out that these two methods present a rapid convergence for the solutions.
In conclusion, both proposed methods are convenient and efficient to approach such problems and they also do not require large computer memory and discrimination of the variables t and x, while applying HAM to the discussed problems has got more advantages than VIM and most other methods; it overcomes the difficulties arising in the calculation of other methods and the auxiliary parameter help us to obtain the solution for fewer approximations. Also HAM does not require small parameters in the equation so that the limitations of the traditional perturbation methods can be eliminated and thereby the calculations are simple and straightforward.
REFERENCES
- Adomian, G., 1988. A review of decomposition method in applied mathematics. J. Math. Anal. Appl., 135: 501-544.
CrossRef - Allan, F.M. and K. Al-Khaled, 2006. An approximations of the analytic solution of the shock wave equation. J. Comput. Applied Mech., 192: 301-309.
Direct Link - He, J.H., 1997. A new approach to nonlinear partial differential equations. Commun. Nonlinear Sci. Numer. Simul., 2: 230-235.
CrossRef - He, J.H., 1998. Approximate analytical solution for seepage flow with fractional derivatives in porous media. J. Comput. Math. Applied Mech. Eng., 167: 57-68.
CrossRefDirect Link - He, J.H., 1998. Approximate solution of nonlinear differential equations with convolution product nonlinearities. Comput. Methods Applied Mech. Eng., 167: 69-73.
CrossRef - He, J.H., 1999. Variational iteration method-a kind of non-linear analytical technique: Some examples. Int. J. Nonlinear Mech., 34: 699-708.
CrossRefDirect Link - He, J.H., 2006. Homotopy perturbation method for solving boundary value problems. Phys. Lett. A, 350: 87-88.
CrossRef - Liao, S.J., 1999. An explicit, totally analytic approximate solution for Blasius viscous flow problems. Int. J. Non-Linear Mech., 34: 759-778.
CrossRef - Liao, S., 2004. On the homotopy analysis method for nonlinear problems. Applied Mathe. Comput., 147: 499-513.
CrossRefDirect Link - Liao, S.J., 2005. A new branch of solutions of boundary-layer flows over an impermeable stretched plate. Int. J. Heat Mass Transfer, 48: 2529-2539.
Direct Link