
Chao Lin Kuo
Department of Electrical Engineering, Far-East University, No 49, Jung-Hwa Road,
Hsin-Shih Town Tainan 744, Taiwan, Republic of China
Her Terng Yau
Department of Electrical Engineering, Far-East University, No 49, Jung-Hwa Road,
Hsin-Shih Town Tainan 744, Taiwan, Republic of China
Yu Chi Pu
Department of Electrical Engineering, Far-East University, No 49, Jung-Hwa Road,
Hsin-Shih Town Tainan 744, Taiwan, Republic of China
Journal of Applied Sciences
Year: 2008 | Volume: 8 | Issue: 13 | Page No.: 2420-2427







ABSTRACT
This study is concerned with the design of a digital Proportional Integral Derivative (PID) controller for synchronization of a continuous chaotic model. The Evolutionary Programming Algorithm (EPA) has been considered as a useful technique for finding global optimization solutions for certain complicated functions in recent years. Therefore, in this research, we attempt to use the EP algorithm in digital PID control design for deriving optimal or near optimal digital PID control gains such that a performance index between the master and slave Sprott chaotic circuits is minimized. A numerical and experimental result exemplifies the synchronization procedure.
PDF Abstract XML References Citation
How to cite this article
Chao Lin Kuo, Her Terng Yau and Yu Chi Pu, 2008. Design and Implement of a Digital PID Controller for a Chaos Synchronization System by Evolutionary Programming. Journal of Applied Sciences, 8: 2420-2427.
DOI: 10.3923/jas.2008.2420.2427
URL: https://scialert.net/abstract/?doi=jas.2008.2420.2427
DOI: 10.3923/jas.2008.2420.2427
URL: https://scialert.net/abstract/?doi=jas.2008.2420.2427
INTRODUCTION
Chaos synchronization has gained a lot of attention among scientists from variety of research fields over the last few years (Chen and Dong, 1998). Chaos synchronization can be applied in the vast areas of physics and engineering science, especially in secure communication (Kocarev and Parlitz, 1995; Murali and Lakshmanan, 1998). The idea of synchronizing two identical chaotic systems was first introduced by Carroll and Pecora (1991). In the most synchronization approaches used for the continuous-time chaotic systems, master-slave or drive-response formulism is employed (Pecora and Carroll, 1990). Let us call a particular chaotic system the master (drive) and another one the slave (response). The goal is to synchronize the slave (response) system behavior to the master (drive) one. In order to achieve the synchronization, a nonlinear controller that obtains signals from the master and slave systems and manipulates the slave system should be designed. Recently, many control methods have been developed to achieve chaos synchronization between two identical chaotic systems with different initial conditions (Yau et al., 2005, 2006; Yau, 2004; Lin et al., 2005). However, in the earlier research, none discusses how to obtain optimal or near optimal digital controller to synchronize continuous chaotic systems according to a specified performance index. As we know, the Evolutionary Programming Algorithm (EPA) has been considered as a useful technique for finding the global optimization solutions for certain complicated functions and also has been applied to solve difficult problems in the field of control engineering (Cao, 1997). Generally speaking, the EP algorithm for global optimization contains four parts: initialization, mutation, competition and reproduction. Furthermore, a Quasi Random Sequence (QRS) is used to generate an initial population for EP algorithm to avoid causing clustering around an arbitrary local optimum. On the other hand, a great majority of industrial processes are still controlled by means of proportional-integral-derivative (PID) controller due to its simplicity in architecture and acceptable performance. However, it is extremely difficult to find the optimal set of PID gains for nonlinear dynamical systems. Since the PID controller gains play an important role in determining the behavior of the dynamical system, many tuning schemes for linear systems have been proposed in the literature (Chien et al., 1952; Cameron and Seborg, 1983; David et al., 2006). The objective of this study is to present a simple but effective digital PID controller to implement the mutual synchronization of two identical Sprott chaotic circuits. The EP algorithm is used for determining the optimal control gains of digital PID controller. An optimization problem is then well defined and an EP algorithm is presented to solve the optimization problem such that the cost function of master-slavesystem is minimized as possibly. The numerical and experimental results are used to demonstrate the proposed controller in this research.
PROBLEM FORMULATION
The one type of Sprott circuits is defined by David et al. (2006):
(1) |
where, the dots above the variable x means time derivatives (first, second and third) and sign (·) is the sign function. A state representation of system (1) can be obtained by defining ![]() Now define a master system, denoted with the subscript m, given in the state form:
Now define a master system, denoted with the subscript m, given in the state form:
 | (2) |
Also define a slave system with the same form, denoted with the subscript s:
 | (3) |
Now let us define the state errors between the master system and slave system as:
(4) |
One main objective of this work is to present a simple but effective PID controller based on EP algorithm to achieve the synchronization of two identical chaotic systems with different initial conditions. The term u in (3) is a PID controller obtained via EP algorithm to guarantee the synchronization performance. The procedure to determine the PID controller u is to first define the output error signal ye = ys-ym, then the transfer function of a digital PID controller, from input e(z) to output u(z) in z-domain as shown in Fig. 1, is generally given by:
(5) |
where, T is the sampling time, kp is the proportional gain, ki is the integral time constant and kd is the derivative time constant.
 | |
| Fig. 1: | The digital controlled system |
In general, for a controller design, the performance criterion or objective function can be defined according to our desired specifications. Two kinds of performance criteria usually considered in the EP algorithm are the Integrated Squared Error (ISE) and the integrated absolute error (IAE). In this study, the IAE index is used as the Objective Function (OF), which is given as:
(6) |
where, E(k)T = [e1 (kT) e2 (kT) e3 (kT)] and |·| is the Euclidean norm of a vector and k is referred to as the sampling time point and kf is the total numbers of sampling. In the following, based on using EP algorithm, we will develop a tuning method for the digital PID controller with optimal gain parameters to minimize the objective function score (6).
SOLVING THE OPTIMIZATION PROBLEM VIA EPA
Here, an extended EP algorithm is proposed to obtain the digital PID controller with optimal gain parameters to minimize the following Objective Function (OF) score (6). Let g be the continuously differentiable matrix-valued function defined for gεS, where S = {gεR3|0<=gi<=Mi, I = 1,2,3}, Mi is the searching space and is bounded. The optimization problem involves finding ![]() such that the OF performance index of the system is minimized. More accurately, the optimization problem (P1) is stated mathematically as:
such that the OF performance index of the system is minimized. More accurately, the optimization problem (P1) is stated mathematically as:
(P1): To find g*εS such that
(7) |
is minimized.
Based on the results shown in Cao (1997), an extended EP algorithm for solving the above optimization problem is described as following steps:
Step 1: Generate an initial population p0 = [p1, p2, K, pN] of size N by randomly initializing each 3-dimensional solution vector pi ε S, i = 1,2,..., N, according to the Quasi Random Sequence (QRS).
Step 2: Calculate the fitness score (objective function) fi = f(pi) for every pi, i = 1,2,K, N, where
(8) |
Step 3: Mutate every pi, i = 1,2,..., N, based on the statistics to double the population size from N to 2N and generate pi+N in the following:
(9) |
where, pi, j denotes the jth element of the ith individual,
represents a Gaussion random variable with a mean zero and variance
is the sum of all fitness scores and β is a parameter to scale
Step 4: Calculate the fitness score fi+N for every pi, N, i = 1,2,..., N, by using Eq. 8. By the stochastic competition process, pi, i = 1,2,..., N, competes with pj, j = N+1,...,2N randomly each against the other. If fi<fj, pi is the winner and survives; otherwise, pj is the winner and pi is replaced by pj. After the competition process, we select the N winners for the next generation and let the individual with the minimum objective function in the winners be p1.
Step 5: If the value fΣ converges to a minimum value, then g* = p1 is the global optimum value and ![]() such that the OF performance index of the system is minimized as possibly. Otherwise, return to Step 3.
such that the OF performance index of the system is minimized as possibly. Otherwise, return to Step 3.
SIMULATION AND EXPERIMENTAL RESULTS
The initial value conditions (x1m, x2m, x3m) = (0.1, 0.1, 0.1) and (x1s, x2s, x3s) = (-1, -1,-1) are used in this numerical example. From Fig. 2, it can be seen that the master system exists a complex trajectory in the phase plane. Figure 3 reveals that the corresponding maximum Lyapunov exponent has a positive value and thus it can be inferred that the master system is in a state of chaotic motion (Chen and Dong, 1998).
 | |
| Fig. 2: | The phase plane trajectory of a Sprott circuit |
 | |
| Fig. 3: | The maximum Lyapunov exponent of x1m plot as a function of the number of driving cycles |
We solved the optimization problem (P1) with N = 70 and β = 0.01 by using the control toolbox of Matlab and Simulink. According to the proposed EP algorithm, we generated P0 = [p1, p2, . . ., p70] according to the QRS. It can be easily observed from Fig. 4 that it converges after about 100 iterations and its final value of IAE is f(z*) = 0.1623. Correspondingly, the PID control gains are![]() The trajectories of kp, ki and kd during the evolutionary procedure are also shown in Fig. 5. For reference, the output response using the resulting PID control gains z* is then shown in Fig. 6. The numerical simulation results show that the proposed PID controller via EP algorithm is viable for synchronization of chaotic systems.
The trajectories of kp, ki and kd during the evolutionary procedure are also shown in Fig. 5. For reference, the output response using the resulting PID control gains z* is then shown in Fig. 6. The numerical simulation results show that the proposed PID controller via EP algorithm is viable for synchronization of chaotic systems.
In order to verify the proposed PID controller in practical system, an electronic circuit implementing Eq. (2-3) is shown in Fig. 7, shows the experimental results when these circuits are connected in a master/slave configuration.
 | |
| Fig. 4: | Convergence curve of IAE |
 | |
| Fig. 5: | Trajectories of kp, ki and kd |
 | |
| Fig. 6: | Numerical time responses of chaos synchronization in Sprott circuits: master and slave system outputs are x1m, x2m, x3m (——) and x1s, x2s, x3s (- - -), respectively |
 | |
| Fig 7: | Master (a) and slave (b) Sprott circuits |
The control was implemented on an industrial computer with a sampling rate of 2000 Hz and shown in Fig. 8. From Fig. 9, it can be seen that the slave circuit response is synchronized to the master circuit response after the control is action at t = 15 sec. The experimental results of error dynamics in Fig. 10 show a convergence to a very small synchronization error and a continuous control input is obtained.
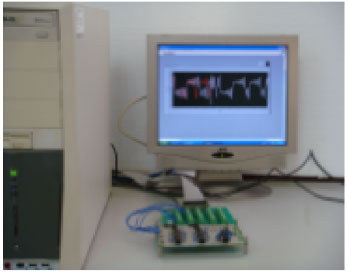 | |
| Fig. 8: | A photograph of the proposed Sprott chaos synchronization system |
 | |
| Fig. 9: | Experimental time responses of chaos synchronization in Sprott circuits: master and slave system outputs are x1m, x2m, x3m (——) and x1s, x2s, x3s (- - -), respectively |
 | |
| Fig. 10: | Experimental results. Syncronization errors e1, e2, e3 and control signal (u) |
CONCLUSION
In this study, using the evolutionary programming algorithm, a simple and effective digital PID controller has been proposed for synchronization of two Sprott circuits. Three gains of digital PID controller can be directly obtained by solving a specified optimization problem as defined above by performing Steps 1-5. Compared with the existing reports for chaotic synchronization, the proposed digital PID controller based on EP algorithm is not only effective but also simple in architecture to implement in a digital base controller.
REFERENCES
- Cameron, F. and D.E. Seborg, 1983. A self-tuning controller with a PID structure. Int. J. Control, 38: 401-417.
CrossRefDirect Link - Cao, Y.J., 1997. Eigenvalue optimization problems via evolutionary programming. Elect. Lett., 33: 642-643.
CrossRefDirect Link - Carroll, T.L. and L.M. Pecora, 1991. Synchronizing chaotic circuits. IEEE Trans. Circuits Syst., 38: 453-456.
CrossRefDirect Link - Chen, G. and X. Dong, 1998. From Chaos to Order: Perspectives, Methodologies and Applications. 1st Edn., World Scientific, Singapore, ISBN: 981-02-2569-5.
Direct Link - David, I., R. Almeida, J. Alvarez and J.G. Barajas, 2006. Robust synchronization of sprott circuits using sliding mode control. Chaos Solitons Fractals, 30: 11-18.
Direct Link - Kocarev, L. and U. Parlitz, 1995. General approach for chaotic synchronization with application to communication. Phys. Rev. Lett., 74: 5028-5031.
CrossRefDirect Link - Lin, J.S., J.J. Yan and T.L. Liao, 2005. Chaotic synchronization via adaptive sliding mode observers subject to input nonlinearity. Chaos Solitons Fractals, 24: 371-381.
Direct Link - Murali, K. and M. Lakshmanan, 1998. Secure communication using a compound signal from generalized synchronizable chaotic systems. Phys. Lett. A, 241: 303-310.
CrossRef - Pecora, L.M. and T.L. Carroll, 1990. Synchronization in chaotic systems. Phys. Rev. Lett., 64: 821-824.
CrossRefDirect Link - Yau, H.T., 2004. Design of adaptive sliding mode controller for chaos synchronization with uncertainties. Chaos Solitons Fractals, 22: 341-347.
Direct Link
Abdulkarim Abubakar Reply
I appreciate with this, because it helps me in my project work litterature review, very interested and important
Editor
Thank you for your positive feedback. We are glad to hear that the research article on designing and implementing a digital PID controller for a chaos synchronization system has been helpful for your project work's literature review. We hope you find valuable insights and relevant information from the article to support your own research. If you have any further questions or need assistance, feel free to let us know.