
P. Lohmander
Department of Forest Economics, Faculty of Forest Sciences,
Swedish University of Agricultural Sciences (SLU), SE-901 83 Ume�, Sweden
S. Mohammadi Limaei
Department of Forest Economics, Faculty of Forest Sciences,
Swedish University of Agricultural Sciences (SLU), SE-901 83 Ume�, Sweden
Journal of Applied Sciences
Year: 2008 | Volume: 8 | Issue: 11 | Page No.: 1995-2007







ABSTRACT
In this study, a growth function was estimated for an Iranian uneven-aged forest. Then the optimal harvest decisions were calculated via stochastic dynamic programming. The harvest decisions which maximize the expected present value of all profits over time are made adaptively, conditional on the latest available price and stock level information. It is possible to determine the optimal harvesting level under different price and stock states. The results show that you may increase the expected present value by more than 26% via optimal adaptive decisions.
PDF Abstract XML References Citation
How to cite this article
P. Lohmander and S. Mohammadi Limaei, 2008. Optimal Continuous Cover Forest Management in an Uneven-Aged Forest in the North of Iran. Journal of Applied Sciences, 8: 1995-2007.
DOI: 10.3923/jas.2008.1995.2007
URL: https://scialert.net/abstract/?doi=jas.2008.1995.2007
DOI: 10.3923/jas.2008.1995.2007
URL: https://scialert.net/abstract/?doi=jas.2008.1995.2007
INTRODUCTION
Iranian Caspian forests cover about 1.9 million ha. These forests are also called the Hyrcanian or Northern forests. They are located on the south coast of the Caspian Sea and the northern slopes of the Alborz Mountain range from sea level to 2,800 m altitude (Fig. 1). These forests grow, like a thin strip (800 km long and 20-70 km wide). These are the most valuable forests in Iran. Industrial harvesting occurs only in the Caspian forest. These forests have been divided into 98 watersheds and each watershed has been divided into several districts. The growth data used in this research have been collected from a district in watershed 45. This district is called Kheiroudkenar. The area is 8,000 ha and extends from 0 to 2,200 m altitude. Stands in this district are uneven-aged with various species. Main species are: beech (Fagus orientalis), hornbeam (Carpinus sp.), maple (Acer sp.), oak (Quercus sp.) and alder (Alnus sp). This forest is managed under selection and shelterwood systems.
Continuous Cover Forestry (CCF) is defined as the use of silvicultural systems whereby the forest canopy is maintained at one or more levels without clearfelling (Forestry Commission, 1998).
The optimal harvesting policy is calculated as a function of the entering stock, the price state, the harvesting cost and the rate of interest in the capital market. We use adaptive optimization. The most important differences between adaptive optimization and traditional deterministic optimization are the following:
It is explicitly accepted that there are conditions in the environment that can not be perfectly predicted. Environment here includes everything that is exogenous to the system which should be optimized. Furthermore, it is explicitly accepted that decisions can take place over time and that later decisions should be based on the best and latest information concerning the exogenous conditions. The tradition of long-term planning in forestry is based on the assumption that long term predictions with high precision are possible. Here we can mention that the traditional forestry assumption is not rational. Timber prices are difficult to predict accurately, since many things may influence the markets. The stumpage price fluctuates over time and it is very difficult to predict it with high accuracy. Therefore we can regard the stumpage price as a stochastic process. The stochastic properties of roundwood prices in Iran have been analysed and described by Mohammadi and Lohmander (2007). Clearly, some other phenomena, such as the growth of the forest, may also be stochastic. However, price variation is the most important source of risk.
We here investigate whether or not the present extraction level should increase or decrease under the influence of increasing risk in the stochastic price process. Our aim in this study is first to estimate a growth function for data that was collected from an uneven-aged forest in Iran. Then Stochastic Dynamic Programming (SDP) was used to determine the optimal extraction level. The solutions were compared to results obtained from deterministic optimization of the problems.
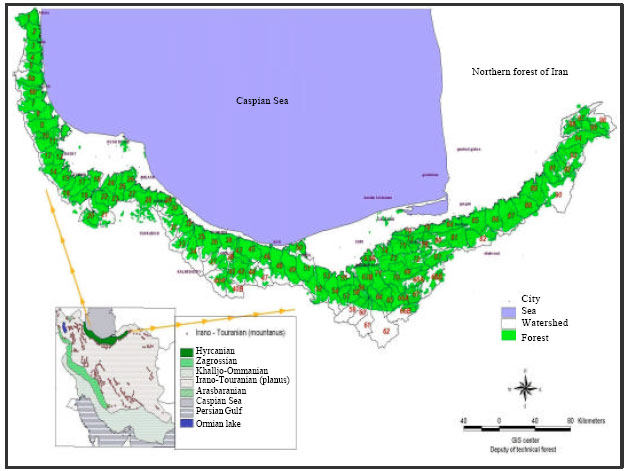 | |
| Fig. 1: | Iranian forest distribution map |
Descriptions of SDP and related methods with applications to general forest management planning problems are given in Lohmander (2007).
Markov decision processes have been used for optimization of continuous and pulse harvesting in forestry. Several earlier studies of uneven-aged forest management have dealt with the problem of finding the best cutting schedules that maximize economic returns. The pioneering studies were based on deterministic approaches such as: Duerr and Bond (1952), Duerr et al. (1956), Chang (1981), Hall (1983) and Michie (1985).
Risk management in forestry decisions was suggested by Hool (1966), who first used a Markovian framework to analyze the management of even-aged plantations. Hool determined schedules that would maximize volume produced over a finite time period. Lembersky and Johnson (1975) maximized the soil expectation value of Douglas-fir (Pseudotsuga sp.) plantations. Lembersky (1976) maximized harvest levels. Lembersky and Johnson (1975) studied optimal policies for managed stands. Their approach resulted in optimal investment in timber production under price and growth uncertainties. Lohmander (1987) investigated the optimal management problem in forestry under the influence of stochastic phenomena. Particularly he has discussed the implication of a stochastic price process, stochastic growth and wind throws. Kaya and Buongiorno (1987) studied economic harvesting of uneven-aged Northern hardwood stands under risk. Their method determined the harvesting policies under uncertain stand growth and prices. They used a transition probability matrix representing stochastic growth and price changes. Haight (1990) studied feedback thinning policies for uneven-aged stand management with stochastic prices. Buongiorno (2001a) developed a generalization of Faustmann's formula for stochastic forest growth and prices with a Markov decision process model. Francois et al. (2005) investigated the management strategy for uneven-aged forest in France with stochastic growth and prices.
In different articles various mathematical programming methods have been used to determine the optimal solution. We will use SDP to determine the optimal harvest decisions. The solutions will be discussed and compared with results obtained from deterministic optimization of similar but simplified versions of the problems. The previous studies are focused on European and American forests. You can not find any earlier study of the optimal harvest decisions with application of SDP in the Iranian Northern forests. For that reason, we investigated the optimal harvest policy in the Iranian northern forests.
Here we introduce some literature on SDP applications. The method of SDP was originally presented by Bellman (1957). Fleming and Rishel (1975) have given a detailed presentation of deterministic and stochastic optimal control. A well written introduction to the theory of optimum control of stochastic differential equation systems is given by Chow (1979). The qualitative properties of optimal adaptive harvest functions have been determined via analytical SDP by Lohmander (1987, 1990). Optimal adaptive harvest functions with continuous stock and harvest control spaces have been investigated by Lohmander (1992). Rardin (1998) and Winston (1994) have given good descriptions of DP approaches and related methods of numerical optimization. Problems in forestry can be expanded in many different directions. We may consider large numbers of connected decision-making problems. Several of the forestry problems associated with risk and the associated optimization approaches have been described by Lohmander (2000, 2007).
Tarp et al. (2000) have modeled the Near-Natural Silvicultural Regimes for Beech with an economic sensitivity analysis. Buongiorno (2001b) studied the quantifying the implications of transformation from even to uneven-aged forest stands. The approach to quantification of the implications of the transformation from even-aged to uneven-aged management presented by Buongiorno consisted of three steps: growth modeling, target state selection and transformation analysis. Jacobsen and Thorsen (2003) investigated the optimal thinning strategies in mixed-species forest under changing growth conditions caused by climate change in Denmark. They used dynamic programming to optimize the harvest distribution between Norway spruce and Sitka spruce species. Comparison of management regimes in beech: The economics of converting an even-aged Fagus sylvatica stand to an uneven-aged stand using target diameter harvesting was investigated by Tarp et al. (2005). Zhou and Buongiorno (2006) studied the forest landscape management in a stochastic environment, with an application to mixed loblolly pine-hardwood forests. They used a Markov chain model to describe stand transition between pre-defined states, with high- frequency shocks and rare natural catastrophes. Stochastic optimization was then used with this model to study the trade-off between landscape diversity and other management objectives.
The basic principles of research, background, earlier related work and the purpose of the present studies should be described in the introduction. Do not change the fonts or line spacing to squeeze more text into a limited number of pages.
MATERIALS AND METHODS
As producers, we benefit from price variation and adaptive production. A special case is adaptive harvesting. Figure 2-4 show the general principles.
Let us assume that the demand function is always at level D2 (= the certainty case). The supply function is denoted S. The market price (given perfect competition in all markets) is P2. Then, the producer surplus is the green plus the red area. Now, we assume that demand is risky. With 50% probability, the demand function is D1 and with 50% probability, the demand function is D3. In the high demand case D3, the price is P3. In the low demand case, the price is P1. In the high demand case D3, the producer surplus is the same as the producer surplus in the certainty case plus the blue area. In the low demand case D1, the producer surplus is the same as the producer surplus in the certainty case minus the red area. Since the blue area is larger than the red area, it is clear that the expected producer surplus is higher in the risk case than in the certainty case.
Figure 3 shows that the quantity supplied to the market is a kinked convex function of the market price as compared to Fig. 2.
 | |
| Fig. 2: | Expected producer surplus under demand variation: I |
 | |
| Fig. 3: | Expected producer surplus under demand variation: II |
 | |
| Fig. 4: | Expected producer surplus under demand variation: III |
One effect of this is the following: If the price is very low (much lower than P1), then the supplied quantity is zero. Then it does not matter if the price falls even lower. The producer surplus is still not below zero. On the other hand, the producer surplus increases with increasing price, as long as the price is above the level where the supplied quantity is strictly positive. Furthermore, the producer surplus increases more and more with increasing prices. The reason is that the price and the quantity increase at the same time. For prices such that the optimal supply volume is strictly positive, the producer surplus is a strictly convex function of price. In such a case, increasing price risk means that the expected producer surplus strictly increases. Compare the Jensen inequality (Rudin, 1987).
Figure 4 shows the producer surplus for different prices as compared from Fig. 3.
Note that the producer surplus is a convex function of price. It is zero for sufficiently low prices. For sufficiently high prices it is strictly convex. Figure 4 shows that producer surplus takes the value Z2 in the deterministic case. In the stochastic case, the producer surplus takes the values Z1 and Z3 with 50% probability each. The expected producer surplus in the stochastic case is Z4. It is quite clear that Z4>Z2. Hence the expected producer surplus is (nonstrictly) higher under risk than under certainty. The expected producer surplus is strictly higher under risk than under certainty in case the relevant prices are found in an interval where the optimal supply is strictly positive, which also means that the producer surplus function is strictly convex.
Growth function: The biological growth function is built on a model of population dynamics which was first presented by Schaefer (1954). Schaefer’s model rests upon the so-called Pearl-Verhultst, or logistic, equation of population dynamics.
A general version of this explicit equation is:
x = x(t) = The biomass stock at time t
| (1) |
Equation 1 expresses biomass growth as a function of the biomass stock. The growth function F(x) is assumed to have the following properties:
 | (2) |
Property (a) means that the stock is growing as long as it remains within the open interval (x1, x2). The second property means that growth ceases at a population size of x1 or x2. Finally, the third property means that the marginal rate of growth is a strictly decreasing function of the population size. These assumptions generate a strictly concave curve (Fig. 5). F(0) = –β<0, the growth rate increases monotonically up to some critical level of the stock ![]() , the maximum sustainable yield of the population and then decreases monotonically. If the system is left to itself, it will end up at x = x2, provided that the initial population is larger than x1.
, the maximum sustainable yield of the population and then decreases monotonically. If the system is left to itself, it will end up at x = x2, provided that the initial population is larger than x1.
Formally,
x2 is a stable equilibrium, which may be interpreted as the environments carrying capacity.
 | |
| Fig. 5: | The biomass growth function (Johansson and Löfgren, 1985) |
By introducing harvesting h(t) into the model as a function of time, we can write the production function
| (3) |
A special case is the logistic growth function discussed by Clark (1976). The growth function is:
| (4) |
| Where: | ||
| G | = | Growth |
| r | = | Intrinsic growth rate |
| x | = | Stock |
| K | = | Environmental carrying capacity or saturation level |
Many papers have been written about growth functions in uneven-aged forests. It is not our aim to review all of them, but here we mention some:
Hann and Bare (1979), Buongiorno et al. (1995), Virgilietti and Buongiorno (1997) and Peng (2000).
In the numerical calculation of this paper, the growth data (Appendix 1, Fig. 6) was collected from previous research publications based on research in the Kheiroudkenar forest that is located in the north of Iran (Zahedi, 1991; Majnonian and Etter, 1993).
We estimated the following growth function:
| (5) |
| Where: | ||
| Gi | = | Growth (m3 ha-1 year-1) |
| α1 and β1 | = | Estimated parameters |
| Vi | = | Stock level (m3 ha-1) |
We assume that ε is a series of normally distributed errors with mean zero and autocorrelation zero.
 | |
| Fig. 6: | Growth function for an uneven-aged forest in the north of Iran |
 | |
| Fig. 7: | Growth residuals as a function of V |
 | |
| Fig. 8: | Growth residuals as a function of V2 |
Regression analysis was used to estimate the growth function. The results show that there is a significant relation between G, V and V2 with t-statistics 5.226 and -2.084 for V and V2, respectively (Fig. 7-9).
Let us determine the stock level which maximizes growth:
| (6) |
The first order optimum condition is:
| (7) |
| Table 1: | Estimated growth function parameters based on the growth data from an Iranian northern forest |
 | |
 | |
| Fig. 9: | ∂G/∂V as a function of V |
 | |
| Fig. 10: | Growth as a function of V |
Figure 10 also shows this value. If we use the estimates of α1 and β1 from Table 1, we find that the growth is maximized if
This stock gives the maximum sustainable yield. If we use the estimates of α1 and β1 and replace V by 628.69 in Eq. 5 and assume that ε = 0, we get:
G = 0.0223462*628.69- 1.7772*10-5* (628.69)2 = 7.0 m3 ha-1 year-1. |
Hence, the maximum increment per hectare occurs when the stand density is 628.69 m3 ha-1 and the maximum sustainable increment is 7.0 m3 ha-1 year-1 (Fig. 10).
Forest research in several countries is to a large extent focused on detailed descriptions of the biological growth.
 | |
| Fig. 11: | Historical stumpage prices (real prices) adjusted to the price level of the year 2004 in Iran during 1980-2003 (€ m-3) |
In this study, the main interest concerns the economically optimal management of forests in Iran. It was important to obtain relevant data from the region that could be used to estimate a robust growth function with theoretically well described mathematical properties. The logistic growth function has a long history in science and been found useful to describe the growth of many kinds of organisms. Since the availability of empirical data from the region was limited, the number of observations is not large. With the selected robust growth function, the number of observations was still sufficiently high to estimate the function parameters. All parameter estimates obtained the expected signs. In the future, in case more empirical observations will become possible to obtain, the results can easily be updated. Then, more focus can be given to different parameters describing the forest properties.
Stumpage price: The stumpage price data was derived from actual timber, roundwood, fire and pulpwood prices at road side minus the variable harvesting costs. Then it was adjusted by consumer price index (CPI) for the base year 2004 (Fig. 11).
In the study, we have assumed that the relative frequencies of trees of different sizes and qualities are the same, also if the total volume per hectare is changing. As a consequence, the prices per cubic meter are not affected by the changing volumes per hectares. In the future, if more empirical data becomes available, it will most likely be possible to generalize the model. Then, one could also make it possible to change the relative frequencies of different sizes, qualities, species and prices. Regression analysis was used to determine the price process parameters.
The first order autoregressive (AR) model is:
| (8) |
We assume that εt is a series of normally distributed errors with mean zero and autocorrelation zero and 0<β2<1. The mean of the price process was calculated based on the first order AR model parameters:
| (9) |
If we use the estimates of α2 and β2 from Table 2, the mean of the net price process is 47.6 € m-3.
Optimization: The aim of the optimization is to maximize the expected net present value from the harvesting activities in continuous cover forest management. We can consider harvesting as decisions under risk or certainty. Decisions under risk refer to the case when there are several possible outcomes. The decision maker knows all possible outcomes and the probabilities. The decisions in forest management are a series of management activities which maximize the objective subject to the resource constraints and market conditions. At each time t, decisions should be made on management activities such as regeneration, thinning, fertilization and final harvesting. Consequences of decisions at time t are not only the instant rewards (costs and/or revenues), but also a new state of the forest affecting which decisions will be made in the future periods. The optimality of decisions at time t should therefore be judged by the immediate rewards and the impacts on the future decisions. The forest resource management problem is hence a multistage sequential decision problem. When forest resource development, management costs and timber prices are stochastic, it is a problem of multistage decisions under risk. It is observed that the decisions at time t can also be viewed as multistage decisions. The forest manager should first decide whether or not to cut the trees at the current age or diameter. If the existing tree is cut, further decisions on the regeneration method and intensity should be made.
The objective function is the expected present value of all present and future harvesting. In the discrete time version of the problem, the expected present value (π) may be written as:
| (10) |
t is the time period, P is the stumpage price (price-variable harvesting cost) and h is the harvest level. r denotes the rate of interest. Real prices and rates of interests will be used. Ct is the set up cost.
| Table 2: | Estimated price parameters based on the stumpage price data for the first order AR process from period 1980-2003 |
 | |
Ct is the cost of moving harvesting machines such as a harvester and a forwarder.
Fixed costs are not explicitly treated in this model. Such costs are fixed and do not affect optimal behaviour. One important reason to analyze the harvesting problem in discrete time is that this makes it possible to include set up costs (such as the costs of moving machines). If you do not consider set up costs, it is mostly optimal to harvest very small quantities every moment. When you have set up costs, which is always the case in reality, it is optimal to harvest large quantities with longer time intervals. Then, the optimal stock level will have a saw tooth shape.
The Present Value (PV) of continuous time natural resource harvesting has been presented by Johansson and Löfgren (1985):
| (11) |
p is the net price (price - variable harvesting cost).
h(t) is the quantity harvested at time t, r is the interest rate (r>0). PV is maximized subject to the production function
 | (12) |
F[(x(t)] is the growth function.
This really means that,
for every S, such that 0≤S≤T where T is the horizon. In our numerical calculation we will use the price and growth to determine the optimal extraction level in an uneven-aged forest in the Iranian northern forest.
SDP approach: The optimal decisions are determined using SDP in discrete time. The periods are denoted t. t∈{0,1,2,.,T}. The final period, the horizon, is denoted T.
ft(m) is the optimal expected present value (in the beginning of period t) of all profits (revenues-costs) when m is the entering state of the system in period t. Rt(m,u) is the profit in period t as a function of the entering state in the same period and the control (or decision and action) u.
U(m) denotes the set of feasible controls as a function of the entering state. In a generalized setting, U(·) could also be defined as function of time, which is however not necessary in this problem. In the final period, T, the optimal decisions and expected present values are determined from:
| (13) |
M is the set of states. The optimal decisions and expected present values in the earlier periods t ∈ t{0,1,2,3,...T-1} are determined recursively via the backward algorithm of stochastic dynamic programming:
| (14) |
p(n|m,u) is the conditional probability of reaching state n in the next period if your entering state in this period is m and the control is u. d is the one period discounting factor.
is the expected present value (expected in the beginning of period t) of all profits in the periods after period t in case the entering state in period t is m and decision u is made in period t.
In this analysis, the state space is two dimensional. The general problem description using state index m is still relevant. One state dimension is the stock level (m3 ha-1) and the other dimension is the price level. The stock level grows according to a deterministic growth function. If harvesting takes place, the stock level is reduced accordingly. The price is assumed to follow a stochastic Markov process. Decisions are sequentially optimized based on the latest information concerning the state, which means that the stock level and the price level are correctly observed and known in the beginning of each period.
The optimization software created by Lohmander was used to determine the optimal harvest decisions. This software solves the SDP problem in Perl (Appendix 2). We need to put the parameters into the software representing: the growth function, the price function, the lowest feasible stock, the period length, the horizon, the set up cost, the rate of interest, the highest stock level index, the highest harvest level, the number of price states and the difference between price states. When we want to solve real problems, we have to explicitly deal with the real numerical problems of stochastic dynamic events. For instance, when we solve the SDP problem numerically, we have to use a constrained state space. For that reason, we can not directly use the assumption of stochastic transitions following a Gaussian probability density function or some other probability density function with infinite tails. One way or another, we have to cut the tails, preserving the most essential properties of the stochastic transition in question. Hence, we use the mean and variance derived from the empirical data and assume that the transitions from one period to the next follow a triangular distribution. When we add a large number of such one period transitions, the total outcome will become very similar to the result we would have obtained if we had used the Gaussian distributions in every step. In the limit, the sum of moves will almost follow a Gaussian distribution in any case, except for the fact that the state space is discrete. When the process state is close to one of the boundaries, there is a low probability that the next stochastic move takes the process out of the feasible set. In such cases, the algorithm adjusts the transition probabilities such that the total sum of transition probabilities always is identical to 1.
Deterministic calculation of the total present values: To determine the optimal harvesting period in the presence of different set up costs, the expected present value was calculated. We start at the initial stock level which is assumed to be the lowest stock level of the cycle. In case there is no price variation and the first harvest will begin t1 years from now, the expected present value is:
| (15) |
where, g is the annual growth (m3 ha-1) which we assume to be constant in the neighborhood of the initial stock level. Here c is the set up cost per hectare and occasion. When the initial stock is 100 m3 ha-1, then from the growth function (5),
g = [(0.0223*100)-1.777*10-5*(100)2] = 2.05 m3 ha-1 year-1 |
![]() is the mean of the net price process,
is the mean of the net price process, ![]() = 47.6 € m-3.
= 47.6 € m-3.
t1 is the cutting cycle and i is the rate of interest in discrete time in the capital market (3%). Note that the rates of interest r and i are very close to each other but not identical. i = er-1 and r = LN (1+i). When i = 3%, then r ≈ 2.956%
RESULTS AND DISCUSSION
SDP results: After executing the SDP software, the results include:
The transition probability matrix (systematic sample): This probability matrix shows the probability distribution of prices in the next period when the price in the first period is known (Table 3). The sum of transition probabilities will be 1. Here we just present a systematic sample because the whole probability matrix will include many numbers (Table 3). In the numerical algorithm, the probability density function of the stochastic residual of the one step transition is a discrete approximation of a triangular function.
The variance (δ2) of a stochastic variable with a triangular probability density function according to the illustration, is:
| (16) |
Since ab = 1, we find that
The optimal harvest volumes in different states: The optimal harvest volumes are determined for different price and stock states (see the parameter values in Appendix 2). If the stock is more than 100 m3 ha-1 and the present price is 127.602 € m-3 or more, the stock should instantly be harvested down to the lowest feasible level (100 m3 ha-1). In other situations, when the price is lower than 127.602 € m-3, we should wait longer. For example, when the present price is 57.602 € m-3, we should wait until the stock reaches 122 m3 ha-1. Then we should harvest 22 m3 ha-1. When the present price is 47.602 € m-3 or more, we should wait until the stock reaches 148 m3 ha-1. Then we should harvest 16 m3 ha-1. When the present price is 37.602 € m-3, we should wait until the stock reaches 148 m3 ha-1. Then we should harvest 8 m3 ha-1 (Appendix 3). The relation between stock, optimal harvest and net price states is shown in Fig. 12. The optimal harvest level is an increasing function of the net price and of the stock level.
| Table 3: | Transition probability matrix (systematic sample). Only 5 rows and 4 columns are shown below |
 | |
 | |
| Fig. 12: | Relation between stock, optimal harvest volume and net price. The stock and net price levels are described below. In the graph, the net price P (€ m-3) can be determined from P = 7.602 + (j-6)*10, where j is the net price state index |
 |
The total present values: The total expected present value when we consider price variation and adaptive harvesting is present value, stock and net price. The expected present value is an increasing function of the net price and of the stock level (Fig. 13).
Sensitivity analysis: A numerical sensitivity analysis was performed in the following way:
| • | In the SDP software, the period length, the horizon, the number of price states and the price difference between price states were changed. The following observations were made: |
| • | When the length of the planning periods increase from 1-5 and 10 years, the optimal harvest volumes increased. The total present values in the higher price states increased. In the lower price states and in the lower volume states, the total present value decreased. |
 | |
| Fig. 13: | Relation between expected present value, stock and net price. The stock and net price levels are described in connection to Fig. 12 |
| • | When the horizon decreased from 100-50 years, the optimal initial harvest volumes did not change but the total present value decreased. |
| • | Are the results sensitive to the number of price and volume states and the resolution in different dimensions? |
| • | First, the number of states in the price dimension was increased in this way: |
| • | The original price states were kept as they were, with the same definitions and distances between different price states. More price states were introduced representing higher and lower price levels. With this change the optimal decisions and present values were not changed. Then, more price state levels were introduced in such a way that each old price state was split into two new price states, increasing price resolution. Then, the expected present value increased by approximately 20 € ha-1. |
Results of deterministic calculation of the total present values: To determine the optimal harvesting period in the presence of different set up costs, the expected present value was calculated. The optimal harvest interval is 6 (9) years, if the set up cost is 50 (100) € ha-1 and the present value is 2758 (2552) € ha-1 (Fig. 14).
| Table 4: | The optimal expected present value (π) in the deterministic case (δ = 0) and in the real case where price is stochastic (δ = 8.82 € m-3) and harvesting is adaptive |
 | |
 | |
| Fig. 14: | The expected present value (π) for different harvesting intervals when the set up costs are 50 or 100 € ha-1 |
The expected present value in the deterministic case (δ = 0) and in the real case where price is stochastic (δ = 8.82 € m-3) and harvesting is adaptive were compared. The results show that the expected present value in the stochastic case increased by 26.54% (Table 4).
The Table 4 also shows the result in case the standard deviation is 100% higher (δ = 17.637 € m-3) than according to the empirical data.
CONCLUSION
In this study, we first estimated a growth model of an uneven- aged forest in the Iranian Caspian region. The growth model can predict the evolution of a stand. The expected present value was determined for the deterministic and the real stochastic cases. Under deterministic assumptions, the optimal harvest interval is 6 (9) years, if the set up cost is 50 € (100 €) per hectare and the present value is 2758 (2552) € ha-1. We used a SDP model to determine the optimal cutting rule for different price and stock states. It is possible to take the fact that future price and growth are not yet known into account in the planning of forest harvesting. We can expect to gain from adaptive harvesting this way. The expected present value increased by 26.54%. Under deterministic assumptions and without set up cost, ∂G/∂V = r when V is optimal (Compare Clark, 1976). In another study by Lohmander (1992), the expected present value increased by 43.3% when the net price standard deviation increased from 0-30% of the expected net price. This is reasonable since you can mostly select to harvest during years when prices are at least one standard deviation above the expected value. In this study, the standard deviation of the stochastic residual in the net price function represents 18.53% of the expected net price (8.82/47.602 = 0.1853). In the earlier study by Lohmander (1992), the standard deviation of the stochastic residual represented 30% of the expected net price.
Can we compare these results?: In this study, we gained 26.54% in expected present value. Lohmander (1992) gained 43.3%. If we divide the relative gains by the relative price standard deviations, we get 1.43 in this study and 1.44 in the previous study.
We find that the results are surprisingly close to each other. The problem is however a bit more complicated. In this study, there is one harvest option each year. In the earlier study by Lohmander (1992), there was only one harvest option every five years. For that reason, we would expect a better result in this study. On the other hand, in this study, there is a stock level constraint, which means that the stock level never may go below 100 m3 ha-1. In the study by Lohmander (1992), there was no such constraint. Hence, the different studies have different constraints. In the end, it turned out that the constraints had similar effects on the expected economic result. Constraints mostly imply costs. In this case, the costs of the different kinds of constraints (to wait at least five years between the harvest periods or to always stay above 100 m3 ha-1) seem to have similar magnitude. In any case, it is obvious that we may make a considerable economic gain by using market adaptive harvesting.
One comment to price adaptive harvesting in forestry, that has sometimes been given is the following: If forest managers initially did not adapt harvesting to prices and then suddenly started to adapt harvesting to prices, this could have the effect that price variations were reduced. Of course, this is true. However, econometrical studies usually confirm that supply is an increasing function of price. Hence, the fact that you should adapt harvesting to price is what you also already find in forestry. Hence, forest managers will not suddenly start to do something completely new if they adapt harvesting to prices. In this study, however, we try to determine exactly how this price adaptive harvesting should be determined in order to optimize profitability.
The harvest interval that currently is used by Iranian Forest, Range and Watershed Management Organization (FRWO) is 10 years. They traditionally used this harvest interval. We hope that our results can help the Iranian FRWO to make economically optimal harvest decisions.
ACKNOWLEDGMENT
We are grateful to E.ON Sweden for financial support.
APPENDICES
| Appendix 1: | The growth data from Kheiroudkenar forest in the north of Iran |
 | |
| Appendix 2: | The optimal continuous cover forest management software created by Lohmander (http://www.lohmander.com/CallDynProgContH5.htm) |
 | |
| Appendix 3: | Optimal harvest volumes (m3 ha-1) in different states. Only 8 rows and 6 columns are shown below |
 | |
| Appendix 4: | Total present value (€ ha-1). Only 8 rows and 6 columns are shown below |
 | |
REFERENCES
- Buongiorno, J., J.L. Peyron, F. Houllier and M. Bruciamacchie, 1995. Growth and management of mixed-species, uneven-aged forests in the French Jura: Implications for economic returns and tree diversity. For. Sci., 41: 397-429.
Direct Link - Buongiorno, J., 2001. Generalization of faustmann's formula for stochastic forest growth and prices with Markov decision process model. For. Sci., 47: 466-474.
Direct Link - Buongiorno, J., 2001. Quantifying the implications of transformation from even to uneven-aged forest stands. For. Ecol. Manage., 151: 121-132.
Direct Link - Chang, J.S., 1981. Determination of the optimal growing stock and cutting cycle for an uneven-aged stand. For. Sci., 27: 739-744.
Direct Link - Chow, G.C., 1979. Optimal control of stochastic differential equation systems. J. Econ. Dyn. Control, 1: 134-175.
CrossRef - Francois, R., J. Boungiorno, M. Zhou and J.L. Peiron, 2005. Management of mixed-species, uneven-aged forests in the French Jura: From stochastic growth and price models to decision tables. For. Sci., 51: 64-75.
Direct Link - Haight, R.G., 1990. Feedback thinning policies for uneven-aged stand management with stochastic prices. For. Sci., 36: 1015-1031.
Direct Link - Hall, D.O., 1983. Notes: Financial maturity for even-aged and all-aged stands. For. Sci., 29: 833-836.
Direct Link - Jacobsen, J.B. and B.J. Thorsen, 2003. A Danish example of optimal thinning strategies in mixed-species forest under changing growth conditions caused by climate change. For. Ecol. Manage., 180: 375-388.
Direct Link - Kaya, I. and J. Buongiorno, 1987. Economic harvesting of uneven-aged northern hardwood stands under risk: A Markovian decision model. For. Sci., 33: 889-907.
Direct Link - Lembersky, M.R. and K.N. Johnson, 1975. Optimal policies for managed stands: An infinite time Markov decision process approach. For. Sci., 21: 109-122.
Direct Link - Lembersky, M.R., 1976. Maximum average annual volume for managed stands. For. Sci., 22: 69-81.
Direct Link - Lohmander, P., 1990. A quantitative adaptive optimization model for resource harvesting in a stochastic environment. Syst. Anal. Modell. Simul., 7: 29-49.
Direct Link - Lohmander, P., 1992. Continuous harvesting with a nonlinear stock dependent growth function and stochastic prices: Optimization of the adaptive stock control function via a stochastic quasi-gradient method. Umeaa (Sweden). http://www.fao.org/agris/search/display.do?f=./1992/v1811/SE9200168.xml;SE9200168.
- Lohmander, P., 2000. Optimal sequential forestry decisions under risk. Ann. Operat. Res., 95: 217-228.
Direct Link - Michie, B.R., 1985. Uneven-aged management and the value of forest land. For. Sci., 31: 116-121.
Direct Link - Peng, C., 2000. Growth and yield models for uneven-aged stands: Past, present and future. For. Ecol. Manage., 132: 259-279.
Direct Link - Schaefer, M.B., 1954. Some aspects of the dynamics of populations important to the management of the commercial marine fisheries. Bull. Inter-Am. Trop. Tuna Comm., 1: 27-56.
Direct Link - Tarp, P., F. Helles, P. Holten-Andersen, J.B. Larsen and N. Strange, 2000. Modelling near-natural silvicultural regimes for beech-an economic sensitivity analysis. For. Ecol. Manage., 130: 187-198.
Direct Link - Tarp, P., J. Buongiorno, F. Helles, J.B. Larsen, H. Meilby and N. Strange, 2005. Comparison of management regimes in beech. Economics of converting an even-aged Fagus sylvatica stand to an uneven-aged stand using target diameter harvesting. Scand. J. For. Res., 20: 63-74.
Direct Link - Virgilietti, P. and J. Buongiorno, 1997. Modeling forest growth with management data: A matrix approach for the Italian Alps. Silva Fennica, 31: 27-42.
Direct Link - Zhou, M. and J. Boungiorno, 2006. Forest landscape management in a stochastic environment, with an application to mixed loblolly pine-hardwood forests. For. Ecol. Manage., 223: 170-182.
CrossRefDirect Link - Limaei, S.M. and P. Lohmander, 2007. Stumpage prices in the Iranian Caspian forests. Asian J. Plant Sci., 6: 1027-1036.
CrossRefDirect Link