
N. Ghorab
Laboratory of Electro Mechanic Systems, Algeria
O. Ghorab
Laboratory of Electro Mechanic Systems, Algeria
N.E. Debbache
Laboratory of Electronic, University of Annaba, Algerie
Journal of Applied Sciences
Year: 2007 | Volume: 7 | Issue: 20 | Page No.: 3119-3122







ABSTRACT
Power systems owners are being confronted with complex operating processes brought on by deregulation. In order to complete in today`s electrical power market place and meet these complex operating conditions, power system owners have begun to retrofit their turbo generator control with modern digital control platforms. Because these modern control platforms provide better control of the power system, the flexibility to meet the demands of the market can be obtained. The control system design is critical to optimize availability and reliability. This study presents examples of generator control system design and integration and offers recommendations for a successful control upgrade. A real time power system simulator in Matlab/Simulink has been used for testing.
PDF Abstract XML References Citation
How to cite this article
N. Ghorab, O. Ghorab and N.E. Debbache, 2007. Real Time Dynamic Simulation of Retrofitted Turbogenerator in Matlab/Simulink Environment. Journal of Applied Sciences, 7: 3119-3122.
DOI: 10.3923/jas.2007.3119.3122
URL: https://scialert.net/abstract/?doi=jas.2007.3119.3122
DOI: 10.3923/jas.2007.3119.3122
URL: https://scialert.net/abstract/?doi=jas.2007.3119.3122
INTRODUCTION
Better performances throughout the turbo generator operational life improves cost efficiency. Today, better control is even more important then before as older turbo generator operate beyond their original life expectancy. Since the early 1980 s digital controls have been the accepted standard. Recent developments in digital processing technology (i.e., faster processing speeds, lower cost and smaller sizes) make digital control the preferred technology of power plant operators (Pare et al., 2003).
Traditional turbo generators controls were accomplished with a fly-ball governor for speed indication, mechanical linkages. The excitation is supplied by exciter machine coupled to the shaft of the generators
THEORETICAL BACKGROUND
The direct Lyapunov method, due to its generality, is a powerful tool for non-linear system analysis. However, it can also be used for other problems in non-linear systems (Gao et al., 1992) In the following we briefly introduce the concept of Lyapunov’s direct method and then discuss how to apply it for designing stable control systems.
Definition 1.x* is the equilibrium point of the dynamic system described by a set of non-linear equations:
x* = f(x)
if once x (t) Is equal to x*, it remains x* for all future time.
Mathematically this means that x* satisfies:
| (1) |
In many practical problems we are not concerned with stability around an equilibrium point, but rather whether a system trajectory x (t) will remain close to its original trajectory x*(t) if slightly perturbed away from it. This kind of stability problem can be transformed into an equivalent problem, where we study the stability of the perturbation dynamics with respect to the equilibrium point 0. The Lyapunov theorem for global stability allows concluding the stability of system by examining the variations of a single scalar function.
Theorem 1 assume that there exists a scalar function V of the state x, with continuous first order derivatives such that:
| • | (2) |
| • | (3) |
| • | (4) |
Then the equilibrium point at the origin Is globally asymptotically stable.
The time derivative V (x) along the system trajectory x (t) can be calculated as follows:
The Lyapunov’s direct method can be used in control design problems, where our task Is to an appropriate control requires hypothesizing a Lyapunov function candidate and then finding the control law to make this candidate a real Lyapunov function, namely :
| • | For given dynamic system x = f (x) find an explicit function of the control variables. |
| • | Select the control law that maximizes the negative value of V(x) at all points along the system trajectory x (t). |
| • | Select locally available signals to execute the chosen control law. |
PLANT MODEL
The turbo generator model used in the design has been decomposed into two subsystems (Ghosh et al., 1984). The first subsystem described the electromechanical processes in the system and is given by:
 | (5) |
The second subsystem describes the turbo generator electrodynamics processes and is of the form:
 | |
| Fig. 1: | Basic configuration of used real time power system simulator |
 | (6) |
The global level control uses the control signals from both subsystems-exciter and governor. The global control of turbine is given as:
| (7) |
And the global control of excitation is then:
| (8) |
The model of the study multi-machine system has been developed in the Matlab/Simulink environment (Hiyama et al., 2000). Typical excitation control systems and also typical speed governing control systems are ready to be utilized as basic components of the developed simulator. User scan easily modify or replace the generating units to alternative ones. The graphical interfaces are also prepared. Therefore, user scan easily examine the simulation results on the display in real time (Fig. 1) (Ohtsuka et al., 1986).
CONFIGURATION OF STUDY SYSTEM
A longitudinal four-machine infinite bus system is selected as a study system to demonstrate the efficiency of the proposed stabilization control (Fig. 2).
Each unit have a separately excited excitation control system. Each unit has a full set of governor-turbine system: governor, steam valve servo-system, high-pressure turbine, intermediate-pressure turbine and low-pressure turbine. The configurations if the excitation systems in Fig. 3 and 4. The configuration of the conventional Power System Stabiliser (PSS) is shown in Fig. 5. The detailed block diagram of the turbine system is also illustrated.
 | |
| Fig. 2: | Longitudinal four-machine infinite bus system |
 | |
| Fig. 3: | Conventional excitation control system for unit 1 and 4 |
 | |
| Fig. 4: | Conventional excitation control system for unit 2 and 3 |
 | |
| Fig. 5: | Conventional Power System Stabilizer (PSS) |
The configuration of conventional speed governing system is shown in Fig. 6.
In the real time transient stability simulations, a three-phase to ground fault is considered as a disturbance at the location A in the study system.
SIMULATIONS
The proposed control design procedure has been evaluated by control of the turbo generator connected via a transformer to an infinite busbar system.
 | |
| Fig. 6: | Conventional speed governing system |
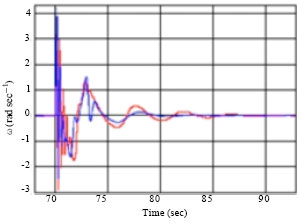 | |
| Fig. 7: | Angular velocity response to the 100 ms short circuit in the busbar with and without PSS |
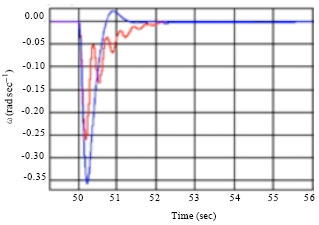 | |
| Fig. 8: | Angular velocity response to the 2 terminal voltage step increase with and without PSS |
To simulate the 39 MVA turbo generator behaviour the fifth order model (Venikov, 1978) for the generator and the first order system of the turbine has been used.
The time responses of relevant system variables to a 2% step increase of the terminal voltage required (Fig. 7) while the angular velocity response to a 100 ms short circuit in the bus bar (Fig. 8). In all figures, the bold line represents the turbo generator response using the proposed control system while the thin line corresponds the standard PI regulator system.
CONCLUSIONS
The research describes an application with a digital governor and a PSS for the turbo generator, witch provides very effective damping of the transition processes in the power transition networks because the control of the active power and the terminal voltage is co-ordinated. Simulation results revealed excellent dynamic properties of the proposed control system. The proposed control design procedure has been evaluated by control of the 39 M turbo generator connected via transformer to an infinite bus bar system. To simulate the turbo generator behaviour the fifth order model for the generator and the fist order system of the turbine.
REFERENCES
- Gao, L., L. Chen, Y. Fan and H. Ma, 1992. Anon-linear control design for power systems. Automatica, 28: 975-978.
Direct Link - Ghosh, A., G. Ledwich, O.P. Malik and G.S. Hope, 1984. Power system stabilizer based on adaptive control techniques. IEEE Trans. Power Apparatus Syst., PAS-103: 1983-1989.
CrossRefDirect Link - Pare, D., G. Turnel, J.C. Soumagne, V.Q. Do and 1.S. Casoria et al., 2003. Validation tests of the hypersim digital real time simulator with a large AC-DC network. Proceedings of the International Conference on Power Systems Transients, (PST'03), New Orleans, USA., pp: 1-5.
Direct Link