
Xiaodong Zheng
Department of Science and Control Engineering, Huazhong University of Science and Technology, wu Han 430074, China
Xinghan Huang
Department of Science and Control Engineering, Huazhong University of Science and Technology, wu Han 430074, China
Min Wang
Department of Science and Control Engineering, Huazhong University of Science and Technology, wu Han 430074, China
Journal of Applied Sciences
Year: 2005 | Volume: 5 | Issue: 10 | Page No.: 1809-1813







ABSTRACT
A simple, shortcut and accurate algorithm is needed in lightning Impulse waveforms (include chopped wave) parameters abstraction in embedded system. Algorithm is put forward which implements mountain shape template convolution by forming rectangle template convolution two times. This method greatly lower down the computational complexity and obtain the time and frequency localization at same time. The results of waveform parameters obtained by this method accord with the requirements of standard IEC1083-2 completely. And it was highly consistent with standard impulse calibration instrument. The computational complexity and the ability of frequency restraining of this algorithm was analyzed.
PDF Abstract XML References Citation
How to cite this article
Xiaodong Zheng, Xinghan Huang and Min Wang, 2005. Lightning Impulse Waveform Parameters Abstraction Based on High Speed Filter. Journal of Applied Sciences, 5: 1809-1813.
DOI: 10.3923/jas.2005.1809.1813
URL: https://scialert.net/abstract/?doi=jas.2005.1809.1813
DOI: 10.3923/jas.2005.1809.1813
URL: https://scialert.net/abstract/?doi=jas.2005.1809.1813
INTRODUCTION
Lightning, scientific research, electricity manipulation, nucleus experiment and high voltage testing can produce large amplitude and fast changing impulse waveforms. Due to the effect of loop parameters and distributing parameters and other influence such as measure loop and measure instruments in high voltage impulse testing, the final waveform being recorded is not a perfect smooth curve, but a curve with oscillation or overshoot and disturb noises. IEC60-1[1] and GB/T 16927.1[2] have given very clear definition to measurement of these kind waveforms. IEC1083-2[3] presents 15 typical impulse waveforms and the ranges of their parameters. It requires that the parameters of impulse waveforms being worked out by user’s waveform analysis procedure should be within the specified ranges.
The impulse voltage or current waveform analysis methods can be divided into 3 classes at present, method of function fitting[4], method of filtering[5] and method of wavelet transformation. Though the variety of analysis methods, the basic process is similar. The step of waveform analysis is: transform original waveforms into mean curve; classify waveforms and obtain parameters according to each class.
Lightning impulse waveforms recorded are made up of three parts: 1) lightening impulse signal; 2) oscillations; 3) electronic noise. Wavelet transformation is a kind of powerful tool that can analyze data both in time and frequency. It adjusts time and frequency window according to the characters of frequency and it is a self-adaptation method of time and frequency localization[6,7]. By wavelet analysis we can separate lightening impulse signal from oscillations and electronic noise, at the same time the sharp inflections remains. But wavelet transformation takes too much time and it doesn’t adapt to embed system.
On account that the main frequency of lightening impulse signal is different from the main frequency of oscillations and electronic noise and each range is comparatively fixed, so it is possible to decompose lightening impulse signal from others by filtering technique. This can lower down the computational complexity, which is very important for embedded systems. But only filtering technique some times diminish or eliminate high frequency part of lightening impulse signal, as a consequence that some important characters of waveforms is disappeared and fail in parameters abstraction. In order to save more characters of waveforms, it is necessary to find an algorithm that is able to cut down computational complexity and gain the time and frequency localization ability at the same time. So that the high frequency noise can be eliminated at the same time more characters of waveforms can be kept.
Gauss function is a kind of Gabor function and its time-frequency uncertainty value reaches the optimal value[8]. So Gauss function template has very good performance, but convolution with Gauss template cost too much time. After analyzing we know that convolution with rectangle template cost very little time, many waveform recorders apply this method to eliminate high frequency oscillations. But the spectrum function of rectangle template doesn’t satisfy the condition of being frequency window function. It means that the rectanglen template lacks frequency localization ability. So this study put forward a new method that convolutes original data with rectangle template for two times and it equals convolution with a mountain shape template for one time. Mountain shape template and its spectrum function satisfy the condition of time and frequency window function. It can be applied in embedded system and gain time and frequency localization ability. After convolution with mountain shape template, the front oscillation, electronic noise and other high frequency disturb signal can be eliminated, at the same time the inflexion can be saved by adjusting the template width near specified point. This does great good to waveform parameters abstraction.
A new method of waveform parameters abstraction based on this filtering algorithm is introduced in brief. It lowers down the computational complexity and the whole waveform processing can be applied in embedded system. The precision of this algorithm satisfies the requirement of standards mentioned. And it has been tested by standard impulse calibration instrument, result shows that they are consistent completely.
BASIC THEORY
The data y = f (t) being processed in digital recorder should be discrete and satisfies t$0. The domain of template function g1 (i) should have upper and lower limit and i is discrete data too. Suppose !a# i# a, ais positive integer. The discrete convolution form is:
| (1) |
2a + 1 multiplications and 2a + 1 additions are needed to calculate each point when convolution. If the recorded data length is m, (2a + 1)m multiplications and (2a + 1)m additions are need. The computation amount is in proportion to the template width. So the larger the template is the more time is needed. The computational complexity is O(am). In order to lower down the computational complexity, a rectangle template is employed. viz.,
| (2) |
Convolution with a rectangle template means every point value is instead by the average of 2a + 1 points nearby. When convolution, current point convolution can be predigested by the last point convolution value. The algorithm is as follows:
| (3) |
From Eq. 3 we know that so long as the first point convolution value is calculated, all the other points only need two additions (subtractions) and one multiplication. The first point need one multiplication and 2a + 1 additions. So m multiplications and about 2m + 2a additions (subtraction) are needed to perform whole convolution. The computational complexity decreases greatly and with the increase of template width the computation increases very little. In general a is greatly less than m, so computational complexity is O(m). So rectangle template saves a great deal of time and it can be applied in embedded system.
The continuous rectangle template function is:
 | (4) |
Its spectrum function ![]() doesn’t satisfy the condition of frequency windows function:
doesn’t satisfy the condition of frequency windows function: ![]() . That is to say the spectrum function of rectangle function doesn’t strongly attenuate[9]. In allusion to this deficiency, a new method is put forward which convolution with rectangle template for two times. Viz., f’ (x) = (f* g * g) (x), f’ (x) is the smoothed waveform after twice rectangle template convolutions.
. That is to say the spectrum function of rectangle function doesn’t strongly attenuate[9]. In allusion to this deficiency, a new method is put forward which convolution with rectangle template for two times. Viz., f’ (x) = (f* g * g) (x), f’ (x) is the smoothed waveform after twice rectangle template convolutions.
Suppose g’ (x) = (g * g)(x), So f’ (x) = (f * g * g)(x) = (f * g’)(x) and g’ (x) is:
 | (5) |
The Eq. 5 shows that g’ (x) is a mountain shape function and its spectrum function is: ![]()
![]()
![]() . So mountain shape function and its spectrum function attenuate strongly. They satisfy the condition of time and frequency window functions.
. So mountain shape function and its spectrum function attenuate strongly. They satisfy the condition of time and frequency window functions.
After Comparing three templates, gauss template, rectangle template and mountain shape template with each other, we know that: gauss template reaches time-frequency uncertainty optimal value and has very good time-frequency localization ability, but gauss function and its spectrum function (gauss function too) isn’t compactly supported, so the part far from ordinate has to be omitted when convolution. Rectangle template is compactly supported and the computational complexity can be greatly reduced after algorithm optimized, but its spectrum function can’t be frequency window function and lack of frequency localization ability. Mountain shape template is compactly supported too, itself and its spectrum function satisfies condition of time and frequency window functions. So mountain shape template has time and frequency localization ability. At the same time once mountain shape template convolution equals twice rectangle template convolution. It cost little time. If the template width is 2a + 1, data length is m, their computational complexity is: gauss template O(am); rectangle template O(m); mountain shape template O(m).
In Eq. 3, there are 2a + 1 points in discrete rectangle template. In order to make the integral equals 1, all the values in the template must be 1/(2a + 1). This is different from the continuum occasion.
SELECTION OF TEMPLATE WIDTH AND FREQUENCY RESTRAIN ANALYSIS
No matter the impulse lightning wave is a theoretical waveform or recorded waveform, they all satisfy the condition of Fourier transformation. To restrain oscillation means restrain or eliminate the corresponding frequency of oscillation. Let f1 (t) = sin[ω (t - ![]() )], ω = 2π/T, T is cycle.
)], ω = 2π/T, T is cycle.
Convolution f1 (t) with rectangle template like Eq. 4:
| (6) |
Equation 6 shows that sine function convolution with rectangle template doesn=t change its frequency and phase. Only amplitude is changed to sin (aω)/(aω) from 1 and analyzing the spectrum function of rectangle template too can prove this result. Let:
| (7) |
k1 is called restrain ratio. Suppose that the main frequency of front oscillation is fz, ωz = 2πfz, the main frequency of wave front of lightning impulse is fL, ωL = 2πfL. So the appropriate a should make sin sin (aωL)/(a ωL) larger and sin (αωz )/(aωz) smaller.
Let α = aω, from Eq. 7 we know that the restrain ratio k1 = sinα/α is not a monotone decreasing function. When α = iπ, i>0 k1 is 0, it achieves best restrain effect. When α = tgα k1 gets extreme value, the restrain effect isn't perfect and sign maybe changed. If the frequency needs to be restrained larger than f0, then let a = 1/(2f0). The Eq. 7 is changed to k1 = f0*sin(πf/f0)/(πf). Worst restrain effect occasion is at f≈ 1.43 f0 and the restrain ratio k is about -0.217 with opposite sign.
Restrain ratio of mountain shape convolution (equivalent to twice rectangle template convolution) is:
| (8) |
Let a = 1/2f0, The worst restrain effect occasion is at f. 1.43 f0 for higher frequency f$f0 too. But the restrain ratio is about 0.04719, nearly down to zero. Suppose b = fz/fL. The frequency of high frequency oscillation and electronic noise is much higher than equivalence frequency of wave front in impulse testing. Let b>8, the restrain ratio of wave front equivalence frequency is no less than 0.95 and the influence to amplitude (about 1/1000) is very little.
So if template width is 2a = 1/8fL, two times rectangle template convolution can eliminate high frequency oscillation and electronic noise without changing waveform parameters. If record length is m, the whole process need about 2(m + a) additions (subtractions) and 2m multiplications. Compare to other algorithms the computational complexity has been reduced greatly. Taking advantage of time and frequency localization, the sharp inflections can be kept such as chopping point in chopped lightening waveforms. In some occasion the high frequency part is needed and low frequency part should be eliminated such as abstracting overshoot or peek oscillation from the lightning impulse signal. The algorithm put forward is applicable in this occasion too. High frequency part can be obtained by subtracting convoluted waveform from original waveform.
PROCESSING STEP
The convolution algorithm introduced in this study is used more than one time during the course of abstraction of waveform parameters. Due to the different frequency ranges are needed to decompose the template width is different. The whole process is:
| • | Convolution is implemented to obtain smoothed waveforms to analyze. |
| • | Judge if it is chopped waveform; if it is true, then go to step 6, otherwise continue. |
| • | Judge the type of wave peek; if it is slow oscillation or long duration overshoot or has no oscillation or overshoot, then continue; if the oscillation or overshoot exceed 5%, then finish 5; if it is fast oscillation or short duration overshoot, then 5. |
| • | Obtain lightning impulse waveform parameters and finish. |
| • | Obtain parameters of lightning impulse waveform with fast oscillation or short duration overshoot and then finish. |
| • | Adjust the template width near the special point and convoluting original data again. |
| • | Obtain the parameters of chopped wave and finish. |
Step 3 is very important. In order to carefully analyze the type of wave peek, the overshoot and peek oscillation signal is needed. The process is as follows:
| • | After convolution, separate waveform into two parts at the peek point. The left part is called wave head and the right part is called wave tail. |
| • | Draw a line perpendicular to abscissa through peek point; reverse the wave tail round the perpendicular line. Connect the reversed wave tail to the original wave tail at peek point and this curve is called double wave tail curve. |
| • | Select appropriate template width, decompose overshoot or peek oscillation from double wave tail curve by method presented above. |
| • | Abstract characters from the decomposed waveform and perform pattern recognition to judge the type of overshoot or peek oscillation. |
The influence of wave front is cleared away in this algorithm. It avoid the difficulty that the equivalence frequency of overshoot or peek oscillation resembles the equivalence frequency of wave front. So this method improves veracity.
RESULTS AND DISCUSSION
In order to verify the veracity and applicability of the algorithm mentioned above, NO-1, 2, 3, 6, 7, 8, 9, 11, 12, 13 and 14 waveforms in IEC-1083-2 are processed. NO-2, 7, 12 waveforms adjust the template width near some special point to ensure high frequency part has been kept near the special point. Final result is shown in Table 1. The waveform recorder device that implements the method introduced has been tested by standard impulse calibration instrument and the result is shown in Table 2.
In Fig. 1a and b, No. 1 is original waveform, No. 2 is processed waveform been moved downwards 200 kv, No. 3 is the subtraction of original waveform and processed waveform been moved upward 200 kv. Figure 1a shows that there are two special point: 1 the beginning of lightning; 2 peek time. The template width is diminished near the special point to keep high frequency signal. By this way important characters can be saved and the disturb signal is almost eliminated.
In Fig. 1b, the front oscillations are cleared away. The method mentioned above has same effect to other special point, for example the tail chopped waveform that doesn’t mentioned in IEC-1083-2.
| Table 1: | Results of waveform’s parameters |
 | |
Annotation: LI lightning impulse; LIC lightning impulse, chopped; LIFO lightning impulse with front oscillations; LISL lightning impulse with slow oscillation; LIFA lightning impulse with fast oscillation; LICFO lightning impulse with front oscillations, chopped; LILO lightning impulse with long duration overshoot; LISO lightning impulse with short duration overshoot | |
| Table 2: | Comparison of peek value of lightning waveform (waveform parameters: 0.84 μ sec/60 μ sec) |
 | |
| The type of standard impulse calibration instrument is RIC422, uncertainty is 0.3% | |
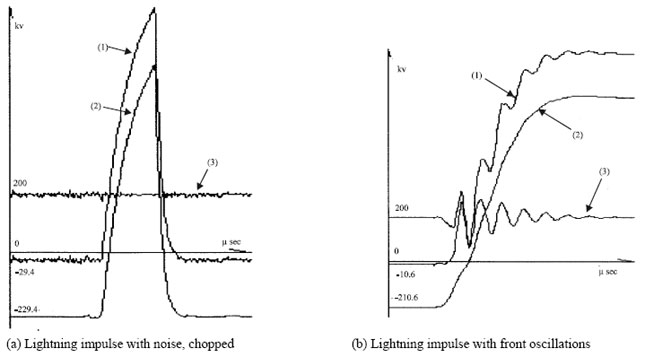 | |
| Fig. 1: | Convolution effect |
CONCLUSIONS
A mountain shape template realized by two times rectangle template convolution provides better conditions for waveform parameters abstraction. Especially the method has time and localization ability, at the same time the computation has been cut down greatly after optimization and this make it can be applied in embedded system.
The entire algorithm has been realized in embedded computer. Result satisfies the requirements of IEC1083-2 and highly accord with standard impulse calibration instrument.
REFERENCES
- McComb, T.R. and J.E. Lagnese, 1991. Calculating the parameters of full lightning impulses using model-based curve fitting. IEEE Trans. Power Delivery, 6: 1386-1386.
CrossRefDirect Link - Perez, J. and J. Martinez, 1998. Digitally recorded lightning impulse with overshoot parameter evaluation by using the Kalman filtering method. IEEE Trans. Power Delivery, 13: 1005-1014.
CrossRefDirect Link