
C. Sasikumar
School of Computing, SASTRA University, Tamil Nadu, India
P. Rakeshmalhotra
School of Computing, SASTRA University, Tamil Nadu, India
M. Ragul
School of Computing, SASTRA University, Tamil Nadu, India
D. Manivannan
School of Computing, SASTRA University, Tamil Nadu, India
A. Umamakeswari
School of Computing, SASTRA University, Tamil Nadu, India
Journal of Artificial Intelligence
Year: 2013 | Volume: 6 | Issue: 1 | Page No.: 52-59







ABSTRACT
Robot is an economical pilotless transportation in forest and industries for detecting obstacles and for monitoring to prevent damages of robot. Avoidance of obstacle is based on PIC microcontroller, Sensor and wireless techniques. The whole system can be made functional and deployed. It stops the robot when there is an obstacle and passes the information to the client about the barrier. The system is monitored through Groupe Special Mobile (GSM) and Radio frequency identification and detection (RFID). Vehicle navigation is carried out using RFID technology and ultrasonic sensor is used to detect the obstacle. If any obstacle is detected, the information is sent to the user through GSM. Battery power and overload is monitored to indicate the worker as well as to send information to main user through GSM. Embedded system helps to minimize human power, decreases power consumption and provides greater performance.
PDF Abstract XML References Citation
Received: October 17, 2012;
Accepted: November 12, 2012;
Published: January 14, 2013
How to cite this article
C. Sasikumar, P. Rakeshmalhotra, M. Ragul, D. Manivannan and A. Umamakeswari, 2013. Design of Transportation Robot and Ultrasonic Obstacle Detection with Wireless Monitoring. Journal of Artificial Intelligence, 6: 52-59.
DOI: 10.3923/jai.2013.52.59
URL: https://scialert.net/abstract/?doi=jai.2013.52.59
DOI: 10.3923/jai.2013.52.59
URL: https://scialert.net/abstract/?doi=jai.2013.52.59
INTRODUCTION
Pilotless transportation system works in the forest area and industries for the purpose development of transport. The Robot has containing carrying ability which is steady and secure. The automatic car is best applicable for economic forest area and industrial transportation. System designed is based on monitoring to avoid the damages to the robot due to some obstacles such as those caused by falling branches and natural calamities (Javadi et al., 2012; Xu et al., 2012). This study describes the wireless monitoring and obstacle of robot detection based on PIC Microcontroller, GSM module, ultrasonic Sensor, RFID for the transportation Robot (Teng et al., 2010). The entire software and hardware design of the wireless monitoring and obstacle detection will be discussed.
OVERALL VIEW OF THE SYSTEM
PIC is the major core of system monitoring and obstacle detection. The entire module is interfaced with GSM module, Battery power module, RFID, Emergency shutdown control circuit and finally Load module (Armesto and Tornero, 2009). The major function which is monitoring through GSM and obstacle detection in between 4M in front of the robot, it makes the robot to stop and send message and GSM is used to find the location of robot and monitoring client (Kai et al., 2011; Balasubramanian et al., 2009). Over all hardware schematic diagram is represented in Fig. 1.
 | |
| Fig. 1: | Structure of hardware |
 | |
| Fig. 2: | Schematic diagram of GSM and CPU |
CPU CORE
For the transportation robot to avoid obstacles, PIC16F877A microcontroller chip is chosen for processing and controlling as it integrates with 16 bit microcontroller, 7 channel ADC converter low power PIC microcontroller operating on active and sleep modes and contains 128 KB flash, flexible power and wake up modes of controller. It incorporates RISC architecture (Du et al., 1995). It also has channels of watch dog timer, pulse width modulation and I/O ports for connecting inputs and output channels. The main core provided in the system makes it faster and accurate and reliable in nature.
The ultrasonic sensor: The main usage of ultrasonic sensor is to identify the obstacles in the path. The module represents the Comparison of passive infrared sensor; the ultrasonic sensor will have high range, so it will easily identify the obstacles in the path (Chenggang, 2009; Idris et al., 2009).
GSM module: For the transportation robot design, the GSM is used to send data to the corresponding person, once the obstacle is found. (SIEMENS Mobile), When the Battery power is low or over load occurs battery 1 changes to battery 2 or vice versa by the command of user (Zhang et al., 2009; Zahrani et al., 2011). Figure 2 shows the parts of module and insertion of SIM with connection of the Antenna, UART. Block diagram represent the schematic diagram of GSM (Dursun and Yilmaz, 2008).
Radio frequency identification and detection: Radio frequency identification and detection (RFID) is the device used to describe the system that contains RFID Tag and Reader, which will transmit the signal to identity the tag (Bo and Xinggan, 2008). RFID tag is placed in the lamp post and RFID reader is placed in autonomous vehicle Tag to reflect to the reader.
Power supply module: Battery supply is connected to the microcontroller’s analog pin through voltage divider. So that the voltage level of the battery is continuously monitored. If the battery level goes down, the controller will indicate the status to the GSM and forward the status to the Base station in a wireless way. In such case another supply can be redirected to the system by activating through GSM from the base station.
Load cell: Load cell is an analog device, used to convert force into electrical energy. There are many types of loads are cell available such as SS-510, SS-710 etc. Module represents the load cell systems. In this study, model SS-710 type load cell is being used and the standard capacity of this load cell is 50 kg (Shahzad et al., 2007).
DESIGN IMPLEMENTATION
RFID process: The design process of robot is based on obstacle detection; navigation will take place using RFID and GSM. (RFID) is the device used to describe the system that contains RFID Tag and RFID Reader, which will transmit the signal to identity of the RFID tag and read the tag and reflect to the reader. RFID tag has its own EPIC (electronic product identification code). The EPIC code is predefined in the controller and the coding is written using embedded C. The software used for writing the code is MPLAB4IDE. The tag details are predefined in microcontroller. The autonomous vehicle moves left, right, forward, reverse, backward, stops and starts by using the RFID. All the goods are loaded in the autonomous vehicle .The vehicle moves according to the navigation direction and a particular RFID tag is associated with it. For each and every process separate RFID tags are used.
Ultrasonic sensor and GSM implementation: The ultrasonic sensor module has transmitter and receiver pin. The transmitter and receiver pin is connected to one port of a particular pin. If any obstacle is found in the path the ultrasonic sensor will detect it and the information is sent to the corresponding person through GSM. GSM will send a message to the source. The vehicle terminal system communicates with each other via short messages send using “At+CMGS” command via GSM.
Microcontroller interface: GSM is also interfaced with PIC microcontroller with the help of RS-232. RS232 standards are widely used for serial I/O interfacing; standard input and output voltage levels are not TTL compatible. To connect RS232 to a microcontroller system must use voltage converters such as MAX-232 to convert the TTL logic level to the RS232 voltage levels. The GSM RX is directly connected to TX of PIC microcontroller. In GSM TX is connected with 1A of NAND gate. The 1B of NAND gate is connected to controller port pin. The Global Positioning System (GPS) TX is connected with 2A of NAND gate and 2B is connected to the controller port pin. RFID reader is used to interrogate an RFID tag. The reader has an antenna that emits radio waves; the tag responds by sending back its data. RFID tag is placed in each connected to 3A and 3B is connected to any one of the port pin of microcontroller. 3Y is connected with 4A and 4B of NAND gate. 4Y is connected to IC2 SN74CH00 of 1A and 1Y of previous IC1 SN74CH00 is connected with 1Yi and Yi is connected with RXD pin of PIC.
Autonomous vehicle is operated through battery and does not cause free from Air pollution. If the two Batteries placed in Robot and they are monitored, so the client receives a message through GSM when battery power is low with some indication in vehicle. Client user contains password key to change the battery from Battery 1 to 2 by GSM (Sabri et al., 2011).
Overload condition checks if the condition is absorbed through Load cell. It indicates the overload through GSM to client, the Vehicle Buzzer Alarm and LED for indication.
RESULTS AND DISCUSSION
Prototype model is developed with multi-objective function; autonomous vehicle is tested with free from pollution and checked with hazardous real time environment and system is monitored through GSM client user.
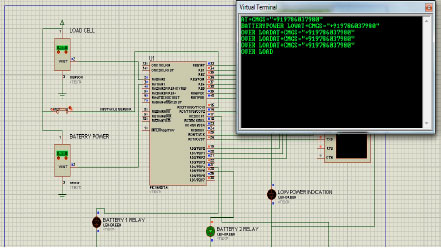
Simulation: Software and hardware prototype model brings with it some results and discussions based on the results. Initially controller coding is compiled in MPLAB4IDE and simulated in Proteus software which can be easily developed hardware system (Fig. 3). Represent the overall flow of vehicle. This diagram shows the overall system flow of autonomous vehicle. Figure 4-6 represent the snap shot of ISIS Emulator indicating Battery power and virtual Windows GSM message.
Hardware result: Figure 7 represents this process use in industries to carry the goods from one section to another section. It is an autonomous vehicle. In these prototype the RFID tag, RFID reader and ultrasonic sensor. Javadi et al. (2012), Xu et al. (2012), Bo and Xinggan (2008) discussed single objective function for moving vehicle using RFID. Du et al. (1995) deals the complicated version microcontroller. Figure 8 represent the predefined set the unified code. In that unified code predefined set that whether the vehicle move forward, backward, left, right, these prototype explains about that the vehicle move forwarded direction. Figure 8 shows that the vehicle moves forward direction in that the RFID tag to be used. Zhang et al. (2009), Zahrani et al. (2011) and Sabri et al. (2011) showed the system battery vehicle. Figure 9 shows the ultrasonic sensor to be used the function of ultrasonic sensor is used to identify that any obstacles.
 | |
| Fig. 3: | Represent the flowchart over all flow of vehicle |
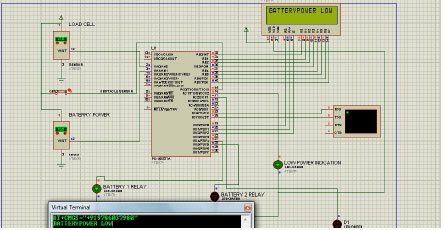 | |
| Fig. 4: | Snap shot of ISIS emulator indicating battery power and virtual windows GSM message |
 | |
| Fig. 5: | Snap shot of ISIS emulator indicating battery power and changing from Battery 1 to 2 |
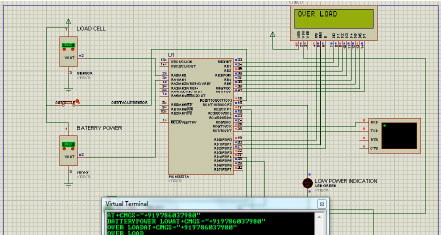 | |
| Fig. 6: | Represent the simulation of robot status checking battery power, overload obstacle detection through GSM to client |
 | |
| Fig. 7: | Prototype of car navigation and obstacle detection using RFID and ultrasonic sensor |
 | |
| Fig. 8: | The vehicle moves forward direction in that the RFID tag to be used |
 | |
| Fig. 9: | Obstacle detection in these prototypes |
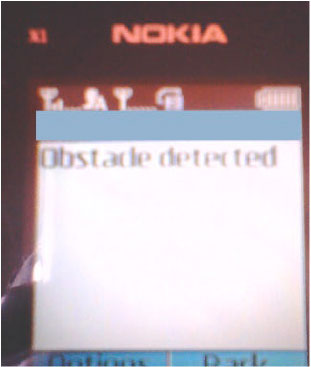 | |
| Fig. 10: | The message delivered to particular |
When the autonomous vehicle starts to move from one section to another section the ultrasonic sensor ON. If any obstacle found in the path the ultrasonic sensor will detect and system is developed with multiobjective function and verified prototype model. Figure 10 shows the message delivered to particular user that the obstacles detected. Shahzad et al. (2007) deals their overload condition and load cell. In this result autonomous vehicle prototype model is developed and working status is monitored and verified.
CONCLUSION
This study solves the issues of autonomous vehicle in forest transportation and industrial transportation to transfer the materials from one place to another section. Tracking of path is done by RFID tag and reader, if any obstacles are found then the message is sent to the corresponding person through GSM. By this technology, the man power is reduced and vehicle is free from pollution. This project can be extended further with GPS (Global positioning system) and Wireless webcam for positioning and capturing the obstacles.
ACKNOWLEDGMENT
The research has been supported by the Research and modernization funded project of SASTRA University-R and M/0008/SOC-001/2009-10.
REFERENCES
- Shahzad, A., H. Farooq, S. Abbar, M. Yousaf, K. Hafeez and M. Hanif, 2007. Hybrid programmable logic controller for load automation. J. Applied Sci., 7: 2904-2907.
CrossRefDirect Link - Armesto. L. and J. Tornero, 2009. Automation of industrial vehicles: A vision-based line tracking application. Proceedings of the IEEE Conference on Emerging Technologies and Factory Automation, September 22-25, 2009, Mallorca, Spain, pp: 1-7.
CrossRef - Balasubramanian. K., R. Arunkumar, J. Jayachandran, V. Jayapal, B.A. Chundatt and J.D. Freeman, 2009. Object recognition and obstacle avoidance robot. Proceedings of the Chinese Control and Decision Conference, June 17-19, 2009, Guilin, China, pp: 3002-3006.
CrossRef - Xu, B., Y. Ge, J. Chen, Z. Chen and Y. Ling, 2012. Elderly personal safety monitoring in smart home based on host space and travelling pattern identification. Inform. Technol. J., 11: 1063-1069.
CrossRefDirect Link - Kai, Y., Z. Junmei, L. Wenbin, Y. Liu, G. Lin and X. Huixia, 2011. Design of ultrasonic obstacle avoidance system of fruit-transportation gyrocar based on ARM. Proceedings of the 3rd International Conference on Measuring Technology and Mechatronics Automation, Volume 1, January 6-7, 2011, Shangshai, pp: 1010-1013.
CrossRef - Dursun, M. and E.N. Yilmaz, 2008. Design and application of internet based solar pump and monitoring system. J. Applied Sci., 8: 2859-2866.
CrossRefDirect Link - Idris, M.Y.I., E.M. Tamil, N.M. Noor, Z. Razak and K.W. Fong, 2009. Parking guidance system utilizing wireless sensor network and ultrasonic sensor. Inform. Technol. J., 8: 138-146.
CrossRefDirect Link - Javadi, M.S., M.A. Hannan, S.A. Samad and A. Hussain, 2012. A robust vision-based lane boundaries detection approach for intelligent vehicles. Inform. Technol. J., 11: 1184-1192.
CrossRefDirect Link - Teng, J.H., K.Y. Hsiao, S.W. Luan, R.C. Leou and S.Y. Chan, 2010. RFID-based autonomous mobile car. Proceedings of the 8th IEEE International Conference on Industrial Informatics (INDIN), July 13-16, 2010, Osaka, Japan, pp: 417-422.
CrossRef - Zahrani, M.S., K. Ragab and A. Ul Haque, 2011. Design of GPS-based system to avoid camel-vehicle collisions: A review. Asian J. Applied Sci., 4: 362-377.
CrossRef - Sabri, N., S.A. Aljunid, R.B. Ahmad, A. Yahya, R. Kamaruddin and M.S. Salim, 2011. Wireless sensor actor network based on fuzzy inference system for greenhouse climate control. J. Applied Sci., 11: 3104-3116.
CrossRefDirect Link - Chenggang, S., 2009. Design of ultrasonic obstacle avoidance system based on S3C2410 microprocessor. Comput. Digital Eng., 2: 55-57.
Direct Link - Du, Y.F., B. Schiller, D. Krantz, C. Shankwitz and M. Donath, 1995. ALX: Autonomous vehicle guidance for roadway following and obstacle avoidance. Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, 1995. Intelligent Systems for the 21st Century, Volume 1, October 22-25, 1995, Vancouver, Canada, pp: 364-370.
CrossRef - Zhang, J., W. Li, C. Sa, D. Wang and J. Zhang, 2009. Design of motion control based on CPLD for automatic pruning machine. Proceedings of the 4th IEEE Conference on Industrial Electronics and Applications, May 25-27, 2009, Beijing Forestry University, Xi'an, pp: 3268-3271.
CrossRef