
Ali Khwaldeh
Department of Computer Engineering, Faculty of Engineering, Philadelphia University, United of States of America
Amani Tahat
Department of Physics and Nuclear Engineering, Technical University of Catalonia-Barcelona Tech, B4-B5 North Campus UPC, 08034 Barcelona, Catalonia, Spain
Jordi Marti
Department of Physics and Nuclear Engineering, Technical University of Catalonia-Barcelona Tech, B4-B5 North Campus UPC, 08034 Barcelona, Catalonia, Spain
Mohammad Tahat
Department of Civil Engineering, New Mexico State University, United States of America
Information Technology Journal
Year: 2012 | Volume: 11 | Issue: 11 | Page No.: 1553-1569







ABSTRACT
In this study, an interactive Graphical User Interface (GUI) application was introduced and tested. It worked as a utility program to facilitate and maximize the re-use of existing FORTRAN software. The GUI had been designed to generate tabulated seismic data (e.g., coefficient of reflection and propagation wave velocities: P-wave and SV-wave), in order to perform investigating the wave propagation in fluid saturated poroelastic medium, through using a simple two-dimensional soil-structure interaction model. Additionally, the theoretical background was also involved. The output data was of interest for understanding the effects of water saturation on the response of the ground and building structures to some degree earthquake excitation. Furthermore, the GUI application provided several utilities (e.g., viewing and plotting capabilities, file manipulation, editing as well as cloning the input parameters). Operating systems for which program had been designed were Windows XP, Windows Vista, Windows 7 and any (32) bits windows. The compilers were: Microsoft VC++ VS 6.0, Digital Visual FORTRAN 6.0 and Borland C++ Builder 6.0. The produced source code could be considered as successful case study for software engineers GUI developers, who were interested in creating (C++ /GUI), for FORTRAN by using the experience of such open source codes.
PDF Abstract XML References Citation
Received: April 14, 2012;
Accepted: June 03, 2012;
Published: August 28, 2012
How to cite this article
Ali Khwaldeh, Amani Tahat, Jordi Marti and Mohammad Tahat, 2012. Maintenance and Reengineering of Software: Creating a Visual C++ Graphical
User Interface to Perform Specific Tasks Related to Soil Structure Interaction
in Poroelastic Soil. Information Technology Journal, 11: 1553-1569.
DOI: 10.3923/itj.2012.1553.1569
URL: https://scialert.net/abstract/?doi=itj.2012.1553.1569
DOI: 10.3923/itj.2012.1553.1569
URL: https://scialert.net/abstract/?doi=itj.2012.1553.1569
INTRODUCTION
For the issue of studying the civil engineering structures during earthquakes there are some possible computer applications which, in turn, have influenced many aspects of structural design (e.g., design codes, post earthquake damage data are collected, frequencies of buildings, moment resistant frame, shear wall, building materials etc.) each of them has its boundary conditions, input parameter and scientific factors. Such computer programmers had been developed to be used in investigating the other major basis for modern building codes in order to understand the phenomena that produce earthquakes the response of structures to ground motion, in addition to the ability of structures to hold out certain types of damage (Greene et al., 2004). To separate “good” from “bad” empirical models (Goel and Chopra, 1998; Stewart et al., 1999) user need to know the accuracy of regression analyses depending on the case study and analysis of the collected numerical data. On the other hand, the issue of wave propagation in soil structure has a great potential in earthquake-computer modeling, thus it has been discussed in many scientific papers by adopting several approaches, for example; the approach of geophysical structures that based on seismic response of soil (Roudsari and Hosseini, 2011). Another approach can be found in Sari and Demir (2006) study. Besides Yahaya et al. (2011) which addressed a new technique for studying soil corrosion.
The current work adopted the developments of a comprehensive earthquake computer model from a literature study Al Rjoub (2007) which has been developed by expert scientists along several years and written in FORTAN; based on expanding the work of Todorovska and Al Rjoub (2006a, b) to include the effects of the seepage force in addition to the effects of partial saturation as well as the free field motion, for presenting the investigation of the effects of water saturation, on the input motion during building-foundation-soil. Going back to the study of Todorovska and Al Rjoub (2006a, b), it has considered such computer model but the seepage force was ignored and the half-space was fully saturated. FORTRAN language has a lot of shortcomings when it comes to tasks such as graphical user-interfaces, plotting facilities and network capabilities; (Chikofsky and Cross, 1990; Chivers and Sleightholme, 2012). Even though, it is still used in developing the current adopted computer model (Al Rjoub, 2007), because it allowed scientists to write code closer to their own scientific language, in addition to compiling it into efficient machine code quickly (Chapman, 2007). Consequently, FORTRAN made using these interactive seismic data processing programs increasingly complex due to the followings:
| • | Taking years to develop several FORTRAN subprograms, working separately to investigate the soil structure interaction in poroelastic soil, leads to a complex FORTRAN package consists several subroutines in different (f files). Then user will face a big question how can I get this thing to work |
| • | Subroutines pass arguments by reference rather than by value, making data protection difficult |
| • | Running them needs a user with a long experience of FORTRAN programming |
| • | Poor string handling, including weak concatenation and length functions (ISO, 13281, 1997) |
| • | Data scoping is limited .Variables can either be local or in common blocks but no other scoping is allowed. As a result, it's not possible to write file-level procedures; shared logic must be in a separate subroutine or repeated via cloning (ISO/IEC TR 15581, 1999) |
| • | Loop controls are somewhat limited, requiring continued use of the “goto” statement to manage flow in some cases |
| • | Poor user interface had to edit the input file by using the normal FORTRAN way which increased mistakes in data entry and system operation (e.g., running the current FORTRAN programs needs to set the Input parameters (e.g., Eta, Rhof, Kf, Gama. Etc. (Table 1), then running it needed FORTRAN/compiler. Therefore, inaccessible functionality might be expected (e.g., errors like "FORTRAN runtime error" while compiling |
| • | FORTRAN's control statements are fairly rudimentary (ISO/IEC 1539-2, 2000), whereas its input/output facilities are positively paleolithic. For instance, the input file name needs to be repeated manually during editing the input of the FORTRAN program, until reading all required data, also it will be difficult to save output file by specifying PC/directory. Table 2 presents input and output FORTRAN code examples from the adoptive code (Table 1) |
| • | Did not have plotting capabilities and did need to export the output data for any external plotting program like excel or origin after being extracts |
| • | In user frustration, low productivity and/or under utilization |
| • | System failure because of user rejection |
| • | Requires input / output files may not work where these FORTRAN programs are not linked and have to be run separately, some of these programs produced an output to be used as an input to another program of the package but user will face so many difficulties in distinguishing them |
| • | User needed to specify numerous output files during editing the FORTRAN code, for several runs; in this case if user had not FORTRAN experience, this would lead to fatale errors and wrong output data. For example in the do loop, user needed to distinguish between the output data in addition to store it separately in three output files 4, 5, 6 as follows: |
 |
Herein, the abbreviations presented the input parameters of the FORTRAN code (e.g., gama) presented the angle of incident waves.
| Table 1: | Description of abbreviation of the input parameters of the FORTRAN code |
 | |
| Table 2: | Input and output FORTRAN code examples |
 | |
On the other hand, these significant shortcomings of FORTRAN programs reduced their utility (Mufti and Jaeger, 1982), so that someone might think of a solution to maximize the re-use of such powerful FORTRAN computer model. The subject of this paper described a major impact solution on providing the missing facilities of these complicated FORTRAN programs. The objective of this study meant to create a useable C++ GUI application (Myers and Rosson, 1992) to facilitate and maximize the re-use of this interactive seismic data processing FORTRAN package.
MATERIALS AND METHODS
Studying the wave propagation in fluid saturated poroelastic medium: This issue would not be covered here, this paper would only reference to some previous studies of soil structure interaction in porous media such as Halpern and Christiano (1986), Rajapakse and Senjuntichai (1995), Bo and Hua (1999) and Senjuntichai et al. (2006). Moreover, Deresiewicz and Rice (1962), Sharma and Gogna (1991) Lin et al. (2001), Liu et al. (2002) and Degrande et al. (1998) present important reading on wave propagation and soil-structure interaction in poroelastic soils. Other recent work on wave propagation in fluid saturated poroelastic media includes that of: Sharma (2004), Vashishth and Khurana (2004), Jinting et al. (2004) and finally, Liu et al. (2005).
The soil-structure two dimensional interaction model: This model followed (Al Rjoub, 2007) model. It considered the effects of the seepage force in addition to the effects of partial saturation as well as the free field motion. When considering the effects of the seepage force, the wave velocities depended themselves on the degree of dissipation and also on frequency which leads to complex valued wave velocities in the soil, because the wave velocities in the soil and the frequency of motion are fundamental for significance of the effects of the soil-structure interaction (Reddi, 2003).
The simple two-dimensional soil-structure interaction model is sketchily shown in Fig. 1.
In this simple two-dimensional model, the damping in the building was neglected and it was represented as a shear wall supported by a semi-cylindrical foundation imbedded in a homogeneous and isotropic poroelastic half-space. In general the center of curvature of the foundation is at some point along the z-axis, above point O. The response of the foundation is described by the horizontal and vertical displacements of point O,Δ,V and the positive clockwise rotation angle φ. The building moves as a rigid body, with translations V and Δ and rotation φ and also deflects due to elastic deformation, Fig. 1. The shear wave velocity of the dry mixture (Vs, dry) followed:
 |
at given (μs): material modulus (): the porosity of the soil and (pgr): mass density. Another variable of the model was the frequency of motion (f) measured by the primary unit of frequency measurement Hertz (Hz). The motion in the half-space has been described as described by Biot (1956) by using the linearized theory of wave propagation in fluid saturated poroelastic media. The two-phase medium has been composed of a solid skeleton, formed by the grains and fluid occupying completely all voids in the skeleton. The properties of this mixture are defined by the shear modulus and Poisson’s ratio of the skeleton (vs). Furthermore, it had been assumed that this foundation could be either completely permeable, allowing for free drainage of the pore fluid, or completely impermeable.
 | |
| Fig. 1: | Sketch of the simple two-dimensional soil-structure interaction model, 2a: foundation width; h: foundation depth; Δ: Displacement vector, O: Center point of curvature of the foundation; Vsp: Shear wave velocity in the building, φ and θ: Rotation angles; Urelb: Horizontal displacement at the top of the building due to its elastic deformation; Poisson’s ratio of the skeleton; H: Shear beam height; W: Shear beam width; mb : Shear beam mass per unit length; mfnd: Foundation mass per unit length; μs: Material modulus; pgr: Mass density |
These conditions would affect the foundation complex stiffness matrix, as well as the foundation driving forces. The half-space surface could also be either perfectly sealed or unsealed and this would affect the free-field motion (Lin et al., 2001). For finding a closed form solution for these model assumptions, the scattered waves had been expanded in a series of outgoing cylindrical waves. Then the coefficients of this expansion had been expressed in terms of the (known) coefficients of expansion of the free-field motion and the (unknown) motion of the rigid foundation through the continuity of displacements at the contact surface. Finally, in order to determine the foundation displacement vector, Δ. The motion of the foundation from the dynamic equilibrium conditions had been solved.
Wave propagation in fluid saturated poroelastic medium: In this model the motion in the soil had been assumed to be governed by Biot (1956) theory of wave propagation in a fully saturated poroelastic medium. While in elastic (one phase) medium two waves exist-one dilatational (P); ( Vp) and one rotational (S) wave Vs; Biot’s theory predicted the existence of an additional P-wave in a poroelastic (two phase) medium which is a result of the relative motion of the fluid with respect to the solid. This second P-wave, referred to as the “slow” P wave (Vps) is much slower and is much more attenuated and dispersed than the “true” P wave also referred to as the “fast” P wave (Vpf). The existence of the slow P-wave was experimentally confirmed many years later, in the 1980s (Berryman, 1980). Al Rjoub (2007) study presented a fully theoretical discussion about the soil-structure interaction problem; including the representation of the scattered waves, boundary conditions at the contact surface, integral of stresses along the contact surface, dynamic equilibrium of the foundation and the free-field motion for incident plane (P-wave), incident plane (SV-wave) and for a Rayleigh wave in a fully saturated porous half-space, considering the effects of the seepage force. The derivation presented for incident plane waves (P and SV) which is for the general dissipative case, follows (Deresiewicz and Rice 1962). For the Rayleigh waves and nondissipative case, the derivation follows (Liu et al., 2005). Thus the motion of the solid and that of the fluid is described by the following two coupled equations of motion:
 | (1) |
To find the solution for P-waves and S-waves let us start with defining the following parameters:
| • | ũ: Displacement vector for the solid-skeleton |
| • | Ũ: Displacement vector for the pore fluid |
| • | e: div (ũ) |
| • | ε: div (Ũ) |
| • | |
| • | p11, p12, ρ22: Dynamic mass coefficients |
Then the Helmholtz decomposition to the displacement vector gives:
| (2) |
| (3) |
where, φ and Φ are the P-wave potentials. And ![]() ,
, ![]() are the S-wave potentials for the solid and fluid, respectively. Substitution of Eq. 2 and 3 into 1 leads to the following two sets of equations for the P-wave and S-wave potentials:
are the S-wave potentials for the solid and fluid, respectively. Substitution of Eq. 2 and 3 into 1 leads to the following two sets of equations for the P-wave and S-wave potentials:
| (4) |
and
| (5) |
Herein, R presents the Reynold’s number which has been set up to be less than 2000 by assumption; it implies that the relative motion of the fluid in the pores is laminar flow.
The solution for P-waves: In the harmonic motion wave motion and the potentials could be illustrated as:
| (6) |
| (7) |
Substituting of Eq. 6 into 4 would lead to the following fourth order differential equation for the P-wave potential in the solid:3
| (8) |
Where:
| (9) |
| (10) |
| (11) |
Further, A, B, C of (Eq. 9, 10 and 11), respectively, could be decomposed into the following two equations:
| (12) |
Where:
| (13) |
and
| (14) |
Could be defined as wave numbers (ks, j) and wave velocities (Vα, j) of two distinct P-waves (fast and slow) in the solid.
Substituting Eq. 6 into 4, would lead to obtaining the wave potential of the fluid which gives:
| (15) |
Where:
| (16) |
The solution of the S-wave: The following differential equation for the (S-wave) potential of the motion of the skeleton that would lead to present the solution of the (S-waves):
| (17) |
Where:
| |
and
| |
are the wave number and wave velocity of the shear waves in the skeleton. The wave potential for the fluid can be obtained as:
| (18) |
Where:
| (19) |
The solution of the equation of motion for the proposed foundation system: Al Rjoub (2007) study had solved it by determining the material constants of mixtures and finding the approximate treatment of partial saturation. Thus addressed that material constants of mixtures, could be determined experimentally (Biot and Willis, 1957), or could be derived from the properties of the components. The elastic moduli of the mixture μ, λ and R had been computed using a simplification (for QR and) of the Biot and Willis (1957) proposed formulae by based on the assumption that the compressibility of the mixture might be much smaller than that of the solid skeleton and of the fluid and could be neglected which considered as a common assumption in soil mechanics (Liu et al., 2005). So that μ = μs and λ = λs+Q2/R, where:
and equals the Lame constant for the skeleton:
| (20) |
| (21) |
For computing the mass coefficients, ρ11, ρ22 and ρ12 the following relations had been proposed by Berryman (1980) were used as in Liu et al. (2005) study:
| (22) |
| (23) |
| (24) |
From Eq. 22-24, it could be seen that the dynamic mass coefficients represented physically mass densities, per unit volume of the mixture. Here τα is the dynamic tortuosity which identified as dimensionless macroscopic parameter for characterizing the resistance to flow of a fluid in porous medium. It is given by:
| (25) |
Free field motion: It is the motion of the half-space that was not affected by the presence of structures. Al Rjoub’s study had also covered this issue in details as being an important part of the interest for the problem that had been analyzed. This motion represented the excitation of the soil-structure system and helped understanding the foundation input motion in order to determine the foundation displacement vector (Δ).
Dynamic equilibrium condition: For the purpose of brevity and without loss of generality, the dynamic moments of the gravity forces were neglected in the displacement vector, Δ, derivations.
 | |
| Fig. 2: | Sketch of the of free-body diagram of the foundation at dynamic equilibrium condition. Where; Fb: Force from the building; Fs: Forces from the soil, O: center point, mfnd: Foundation mass per unit length; Ms and Mb: dimensionless matrices |
Figure 2 presented the free-body diagram of the foundation which subjected to the forces from the building F(b) = mbw2[Mb]Δ and the forces from the soil, F(s) = F(s)driv+2μ[K(s)]Δ Herein, 2μ[K(s)] is the foundation stiffness matrix and (Mb) is the dimensionless matrix that depended on the building model plus characteristics. (F(s)driv) considered as the external force required to hold the foundation in place when it is subjected to the action of the free-field waves. For small amplitudes of the response, the forces from the building were represented in terms of the displacement vector, Δ, as follows (Todorovska, 1993b) to finally drive the displacement vector:
Where, mfind and [Mfind], illustrated the mass of the foundation in addition the foundation dimensionless mass matrix, respectively. The expressions including these moments could be found (Todorovska, 1993a, b).
Running the (GUI) application: This program is an open source code, named as “WM”. It is available on online and could be freely downloaded from (http://aims-thinkenergy.org/amani/index.lua/section/10) including the setup files and user manual (Tahat et al., 2012). To simplify inserting the specified input data via WM main screen, users must be familiar with the theoretical background of the program (Al Rjoub, 2007). Furthermore, WM had been created by using the Borland C++ Builder 6. At least 25 MB of free disk space must be required for installing WM on user's computer (PC). Figure 3 presented the menu function diagram of WM program.
Installation of (WM) program designed to be done as simple as any other Windows application. It does not require changes of hard disk partitions.
 | |
| Fig. 3: | The menu function diagram of WM program |
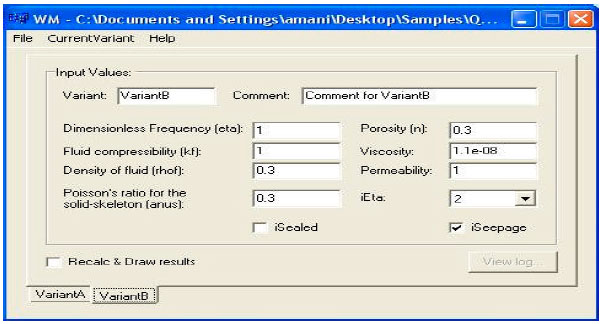 | |
| Fig. 4: | The main window widget and menus bar |
It was an "executable" that could be executed by double clicking on it to be installed, then installations process would lead to establishing program’s shortcut in the “start menu folder” or “desktop”. After installing WM on user computer (PC), the program would work in a dialog mode through all steps until closing it. Several available subprograms in the package would be opened by choosing an item from the standard menu of the program. Multi windows preserved through the execution of the program. Running the program did not need compilers or programming language to be installed in PC. WM allowed file manipulations. Figure 4 presented the main window of the program. The dimensionless input parameters are (eta, n, kf, rhof, anus) plus “iEta” are briefly described in Table 1, all detailed descriptions could be found (Al Rjoub, 2007) study. The main window of WM is presented in Fig. 4. It consisted of widget (e.g., checkbox) and menus bar (e.g., file, CurrentVariant). It consisted of three checkboxes and they are: "iSealed", "iSeepage" plus “Recalc and Draw results". In addition to the “view log” button, for viewing output file. Switching the mode of calculations could be done on click by using the two checkboxes (“iseapage” and “iseal”) easily. The “CurrentVariant” menu bar is shown in Fig. 5.
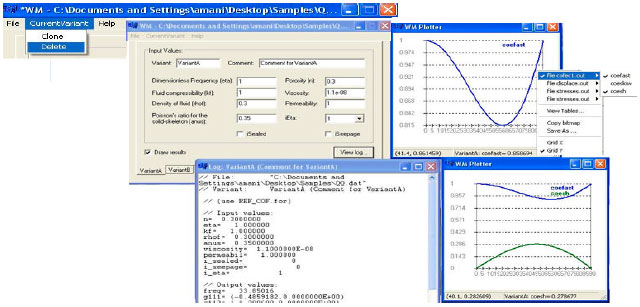 | |
| Fig. 5: | The “CurrentVariant” menu bar, adding up some example of opened WM windows (e.g., plotting, input and “right-click" popup menu) |
On the other hand, WM could generate six output files with the following extension: "*.out” (e.g., check, cofec1, freq_cof, freq_disp, stresses and place) popped up in separated window, as shown in Fig. 5. Out files stored spontaneously in the default directory (samples) to be recalled and plotted upon user request by selecting one option of "right-click" popup menu, as presented in Fig. 5.
Users of WM have to start with setting the variants (A, B, C, D, ….etc.) along with determining some specified comment next to variant, following the condition of a specified case study. These variants would be used instead of using the previous several input files, in order to allow understanding the whole matter in one work station; user could save all variants in one input file, where the default input file included two variants (A and B). The location of the (variants, comment filed) is clear in the main window, the user comment will be appeared in the output file. Sometimes the case study is due to fixing some parameters so that user could generate so many curves each one differs from the other by changing one parameter at each time. For this purpose user could “delete” or “clone” more variants depending on the preconditions of the specified case study. This could be done by pointing the option “clone” or "Delete" from the “CurrentVariant “menu bar, as presented in Fig. 5. Then user could continue deleting until deleting all variants to restart the WM program, by inserting the default input file QQ.dat for adding new variants.
Borland C++ builder 6 tool: For creating a GUI drive-program for FORTRAN programs so many tools might be available. Somehow, there are no significant differences between them but it depended on the GUI developers experience along with their interests plus the required operating system. For example GUI developers could use (DISLIN) which worked well with open source Fortran 95 compilers such as g95 or gFortran. But DISLIN; is not an open source product however its library could be downloaded and used free of charge for non-commercial purpose (Michels, 2011). The source code of this application would be a good case study for supporting the software engineers (GUI) developers; for providing a FORTRAN program with a Graphical User Interface (GUI) based on Windows NT/2000/XP Borland C++ Builder 6 tool (Spolsky, 2001) . Because they needed to use a suitable external library, since there are no GUI-construction facilities built into the language. This work had used the Borland C++ Builder 6 tool which is a C++ Integrated Development Environment (IDE) from Borland Software Corporation and is similar to Microsoft's Visual C++ but experienced GUI developers can readily distinguish the differences. Borland C++ Builder is newer and much more visual than Visual C++ and requires less training and knowledge of Windows also allows GUI developers to create GUI applications with very little effort. Furthermore, it supports rapid application development methodology; includes drag-and-drop WYSIWYG graphical user interface builder; supports the draft of C++0x standard; includes Boost and TR1 libraries; incorporates Borland Visual Component Library (VCL) and Component Library for Cross Platform (CLX); and it has built-in support for major databases and touch and gesture processing (Phillip, 2007).
RESULTS
Here, we presented the real examples of computing various seismic data by using the new developed GUI. The current GUI provided a flexible frame of work to study and analysis several important factors (e.g., environmental factors, such as temperature and heavy rainfall). In the meantime, using the WM program did not need FORTRAN knowledge or any compiler to be installed in the PC. The output data of this application could be very important in earthquake researches. The expected output files consisted of : (the wave velocities, free-field motion amplitudes, foundation input motion amplitudes, foundation complex stiffness and the system response in the frequency domain for different values of the model parameters and for incident plane P- and S- waves) in addition to several related data. The wave velocities in the soil medium can be considered as the most fundamental quantities that affected the system response. Therefore, the effects of the model parameters on the wave velocities would be annualized here as one output of the WM program.
The numerical results of this model based on the proposed theoretical methods of the two dimensions model (produced output data), had been tested and computed using a closed form solution obtained by using the current GUI utilities. Explanations of the results observed as well as detailed analysis of the causes of the observed changes of buildings structure (depending on type, local soil conditions, etc.) were beyond the scope of this study, however, the numerical results of (Al Rjoub, 2007) study had been recomputed by applying current produced GUI for the same input parameters, these results had been interpreted in relation to previous literature studies based on some case studies tests.
Input parameter of all tests: The following range of the input parameters was considered in the analysis. The pore fluid in this study is water which has mass density (103) kg m-3. For the mass density of the material of which the grain is made value pgr =2.7x103 was used. Stiffness of the skeleton was varied so (μ/Kf) had given the following values (0.01) corresponded to soft soil and (0.1) to stiff soil, in addition to 1 and 10 for porous rock followed Lin et al. (2001). Only one value of Poisson ratio vs was considered as 0.3, for all calculations, plus two values of porosity = 0.3 and = 0.4. In this work, results was shown for permeability (k) of range (10-12-10-6). For dry soil (pores filled with air), the following values were taken: μ/Kf = 0.001 and the dry shear wave velocity was computed as:
Another variable of the model was the frequency of motion. The upper bound of frequency was constrained by the requirements that: (1) The flow of the fluid in the pores is laminar and (2) The wavelengths are much larger than the size of the pores. These values were followed (Biot, 1956). The considered frequencies were not larger than 100 Hz. Table 3 illustrated the input parameters related to the tested case study.
Computing wave velocities for P-waves (fast (Vpf) and slow (Vps) in addition to S-waves (Vs); when the seepage force is much smaller than the inertial forces and its effects are negligible: The Wave velocities Vs, Vpf, Vps in the soil for full saturation had been tested as function of the model parameters: soil permeability (K) relative stiffness of the skeleton (/Kf) and frequency (f) along with degree of saturation.
Wave velocities (Vs, Vpf, Vps) and inverse soil permeability (1/K) test for fixed relative frequency (Test 1): This testing case had studied the variation of the normalized wave velocities of the mixture and inverse permeability (1/k) for different values of a dimension less ratio (μ/Kf) that described the stiffness of the skeleton. Here, the parameters (Kf ) and (μ) represented the absolute viscosity of the fluid and the intrinsic permeability of the skeleton, respectively . In this test wave velocities were real valued and did not depend on frequency (f) for porosity ![]() = 0.4.
= 0.4.
The computed results are shown in Fig. 6. Moreover, frequencies was presented here as reference for showing how much the wave velocities (Vs, Vpf, Vps) changed as result of the seepage force. Thus, Table 3 presented frequency independent velocities for different combinations of all other input parameters. The S and P-wave velocities Vs, Vpf, Vps of the dry solid were also presented to be used as reference in studying the effects of saturation.
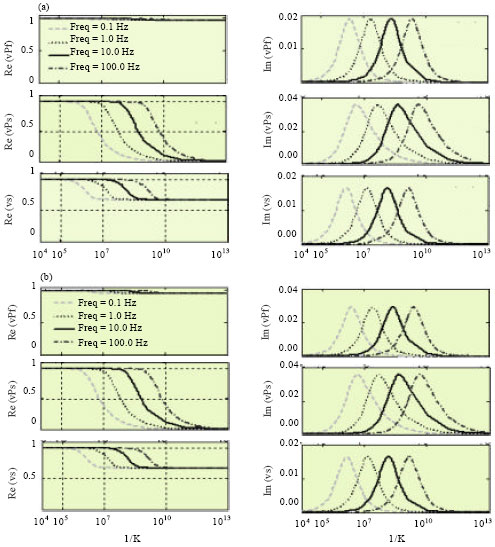
Normalized velocities (Vs, Vpf, Vps): Would be drawn with respected to the model parameters. For all figures appeared in this study, the normalized velocities had two components of variation to be drawn.
| Table 3: | Wave velocities for fully saturated soil for the case of no seepage force |
 | |
 | |
| Fig. 6(a-b): | Normalized wave velocities (Vs, Vpf, Vps) of the mixture versus inverse permeability (1/K), (a) The absolute frequency is set to f = 1 Hz and (b) The relative frequency is set to η = wa/(πvsdrv) = 1; where the reference length a = 12 m |
And they are: (1) The “real” component that would be illustrated by drawing the variation of real velocities with respect to the model parameter; three real values of velocities would be appeared on figures and they are: Re (Vs), Re (Vpf) and Re (Vps ), respectively. (2) The imaginary component which was shown because the effects of scattering and radiation depend on the dimensionless frequency rather than on the absolute frequency, that would be illustrated by drawing the variation of the imaginary velocities Im (Vs), Im (Vpf) and Im (Vps) with respect to the model parameter. The real parts results of all charts would be shown on the left hand and the imaginary parts would be shown on the right hand of each figure.
Herein, μ/Kf: is dimension less ratio describes the stiffness of the skeleton where μ is the absolute viscosity of the fluid and Kf is the intrinsic permeability of the skeleton.
A comparison of the results of Fig. 6a and b had addressed that, for fixed permeability (1/k) and absolute frequency f, the change of the wave velocities (Vs, Vpf, Vps) with permeability (1/k) did not depend on the relative stiffness of the skeleton, although their absolute values were very much dependent on the relative stiffness of the skeleton in Table 3. Moreover, for fixed relative frequency μ = 1 = wa = J/vs, drv the change of both real parts; Re (Vs, Vpf, Vps) and imaginary parts; Im (Vs, Vpf, Vps), of the wave velocities; (Vs, Vpf, Vps); was similar but occurs within a different range of values of 1/k. The change started to become significant for smaller permeability for materials with stiffer skeleton. Furthered the results in Fig. 6 showed that:
| • | The velocities differed significantly only within a band of values of permeability (1/k). Outside this band, they rapidly approached their asymptotic values which are real valued Re (Vs, Vpf, Vps), shown in Fig. 6a |
| • | The seepage force had little affected the velocity of the fast P-wave (Vpf) that was decreasing only by up to about 5%. Furthermore, the velocity of the slow P-wave (Vps) was affected most by the seepage force, decreasing to zero for very large seepage force |
| • | The velocity of the S-waves (Vs) reduced by up to about 40% of its value for zero seepage force |
Wave velocities Vs, Vpf, Vps and inverse permeability test for different values of frequency (μ/Kf) (Test 2): This test had also tested the variation of the normalized wave velocities Vs, Vpf, Vps with inverse permeability (1/k) at the porosity = 0.4. The results of this test could be seen in Fig. 7. The different curves were correspond to different values of frequency (μ/Kf), that had given two values 0.1 and 0.01. This test found that at higher permeability (i.e., at smaller values of frequencies of motion (1/k) ), the seepage force started to affect the wave velocities.
 | |
| Fig. 7(a-b): | Normalized wave velocities (Vs, Vpf, Vps) of the mixture versus inverse permeability for different values of frequency. For f = 0.1, 1, 10 and 100 Hz, (a) At (f) = 0.1 (b) At (μ/Kf) =0.01 |
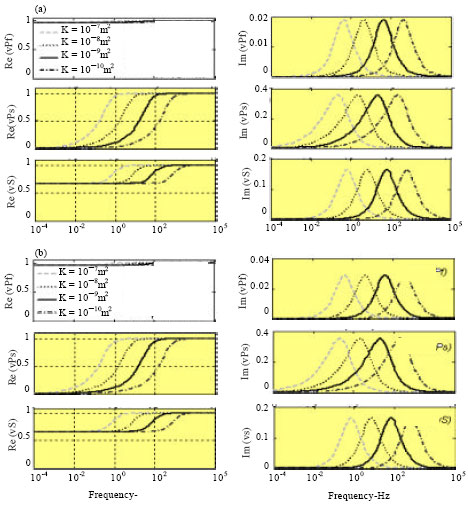 | |
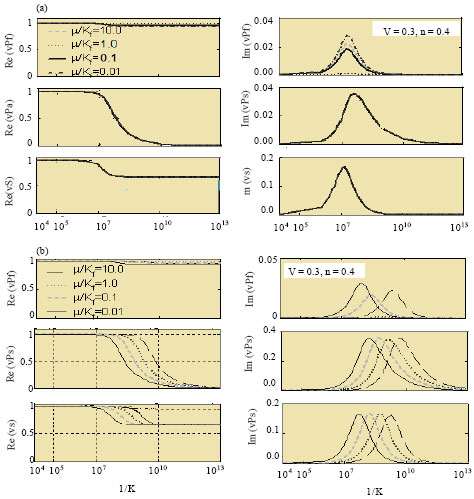
| Fig. 8(a-b): | Normalized wave velocities (Vs, Vpf, Vps) versus frequency for different values of permeability, (a) Stiff soil, μ/Kf= 0.1 and (b) Soft soil, μ/Kf = 0.01 |
Wave velocities Vs, Vpf, Vps and frequency (f) test at different values of permeability (k) (Test 3): This test had tested the variation of normalized wave velocities versus frequency (f) in (Hz). Results had computed on a logarithmic scale for different values of inverse permeability (1/k) at the porosity = 0.4. Results are illustrated in Fig. 8. It could be seen that the trend of the variation of the normalized wave velocities with increasing frequency is the same as the trend with increasing permeability (Fig. 8).
DISCUSSION
This GUI application can be recognized as integrated software that provides solutions to swap the shortcomings of the existing FORTRAN model; to allow user make a greater benefit when using it, instead of using the previous FORTRAN programs.
WM program utility and validity: Here, the validity and utility of the currently developed graphical user interface (GUI) is presented.
Validity: Numerical results were shown for variations of the wave velocities (Vs, Vpf, Vps) for different values of the model parameters including (1/k) and (f).The solution of the problem was expressed entirely in terms of dimensionless parameters which were defined using reference. The effects of the model parameters on the wave velocities were presented. Numerical results were computed based on Biot’s theory. Biot’s theory predicted the existence of two P-waves (one fast and the other one slow) and one S-wave in poroelastic soil medium (Vs, Vpf, Vps). Subroutines from Zhang and Jin (1996) were used in computing Bessel functions of complex arguments Im (Vs, Vpf, Vps). Three computed testes had been applied (Test 1, 2 and 3).
Frequency-dependent performance: The issue of the current tests (Test 1, 2 and 3) is a very important issue for earthquake engineering purposes, when it comes to determine the properties of the buildings in order to fix the structural models in earthquake areas. The physical meaning of the velocity variation and frequency as well, are crucial points that must be explored in order to relate it to the properties of the buildings (Parolai et al., 2006). There was an abundant scientific literature that covered the same issue of variations of the foundation frequency in buildings. Recent studies such as Mucciarelli et al. (2004), Clinton et al. (2006), Dunand et al. (2006) and Zembaty et al. (2006), had also shown how these variations could be monitored as well. The current testing results of Test 1, 2 and 3 showed that, when the seepage force is considered, the velocities of these waves are frequency dependent. The wave velocities in the soil decrease with increasing seepage force, the effects of which are more pronounced for smaller frequency of motion, larger fluid viscosity, larger porosity and smaller skeleton permeability (i.e., for larger:
Test 1, 2 and 3 had been tested for very small:
which had dimension of mass density, the seepage force was much smaller than the inertial forces and its effects were negligible this could be derived straight forwardly from Eq. 13. In that case, the wave velocities were real valued and do not depend on frequency and were used in this study as reference in showing how much the wave velocities change as result of the seepage force. Therefore, for large enough:
the velocities of the SV and fast P-wave approached their asymptotic value which is real valued and the velocity of the slow P-wave approached zero. From (Test 1) when:
the wave velocities Vs, Vpf, Vps were normalized by their respective value for no seepage force which showed that wave velocities variation was very small for the fast P-waves (Vpf); (about 5%) and was about up to (40%) for the S-wave (Vs), besides that, it was up to (100%) for the slow P-wave velocities (Vps). Thus, the percentage change depended very little on the relative stiffness of the skeleton (i.e., μs/kf. These variations was close to Al Rjoub (2007) results and coherent with those estimated by Clinton et al. (2006), Dunand et al. (2006). The trend of Test 2 was as expected, where, for smaller frequencies of motion, the seepage force started to affect the wave velocities at smaller (1/k), because the effect of the seepage force was through the combination:
The trend of Test 3, presented the variation of the normalized wave velocities with increasing frequency, it results was the same as the trend with increasing permeability which appeared in Test 2. Test 2 and 3 results are expected and showed an excellent agreement with Biot’s theory facts (Biot, 1956), where the effect of the seepage force must be through the ratio:
Accordingly, the test results and the output data from the tabulated files of the WM program as well showed that, when considering the seepage force, the velocities of these waves would be frequency dependent. Thus; wave velocities in the soil was decreased with increasing seepage force, the effects of which was more marked for smaller frequency of motion, larger fluid viscosity, larger porosity and smaller skeleton permeability. These observations showed that small frequency variations under weak and strong motion could also be due to the elastic property variations of the soil structure system which leaded to a good agreement with the results of Clinton et al. (2006) as well as Todorovska and Al Rjoub (2006a). Comparing this with Dunand et al. (2006) study, showed another behavior for the variations and presented a transient decreases of frequency due to the opening and closing process of pre-existing cracks in the structure.
The different between the results by Todorovska and Al Rjoub (2006a, b) and this work was; that the effects of the seepage force were considered.
Herein, the performance analysis of Test 1, 2 and 3 proofed the validity of using the WM program. On the other hand, there are some good applications to be used in studying further complicated problems such as the nonlinearity of the foundation soil even for very small strains (Hudson, 1970; Luco et al., 1987). Other computer applications are recommended during strong earthquake shaking, for studying the apparent period of the soil-foundation-structure system (Udwadia and Trifunac, 1973).
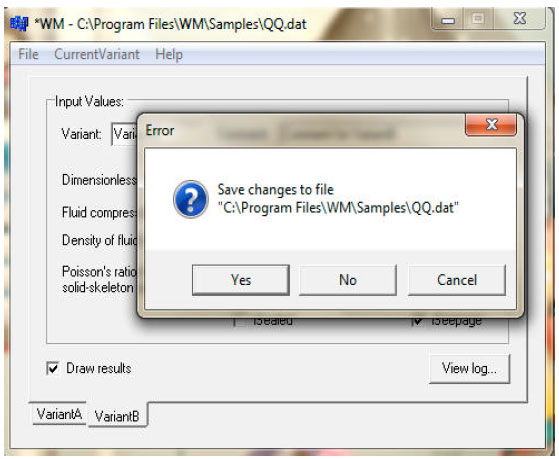 | |
| Fig. 9: | An error message example: if user tried to exit from the WM program after running the program and implying new input parameters instead of using the default input file (QQ.dat) |
Utility: The numerical results of (Al Rjoub, 2007) study had been recomputed by using WM program for the same input parameter and had given the same accurate data files of the FORTRAN model but with less effort and very short time. For example the Fortran calculations of the Vs, Vpf, Vps were manipulated manually at several stages to get the final answer of a list of variants (A, B, C,…, etc.). Furthermore, user needed to repeat running the program as soon as changing any input parameter by using separated input file which was inaccurate and might lead to several errors during compiling the FORTRAN code. Also the processes were tedious and time consuming as well. In addition there was no way to extract and plot the output data. WM program had solved all these problems automatically and provided a usable, flexible and friendly Graphical User Interface (GUI) that clarified the analysis steps and provided so many Services ( like save, save as, clone, delete, copy, plot copy bitmap, grid, paste, read only) plus supported the file manipulations required by user.
Error messages: The previous users of the FORTTARN model would feel the major advantage of this GUI after it made computer operation more intuitive and thus easier to learn and use. For example, new user of the Fortran model could move a file from one directory to another by dragging its icon with the mouse, before that user was obliged to remember and type commands in order to accomplish the same task by coding with FORTRAN (e.g., saving output file and/or calling input file). Adding to this intuitiveness of operation is the fact that current GUI would generally provide users with immediate, visual feedback about the effect of each action besides error messages, as presented in Fig. 9.
Multitasking: For example, when a user deleted an icon representing a file, the icon immediately disappeared, confirming that the file had been deleted. This contrasted with the position for command line interfaces, in which the user typed a delete command but received no automatic feedback indicating that the file had actually been removed. In addition, the current GUI would allow users to take full advantage of the powerful multitasking capabilities of modern operating systems by allowing such multiple programs and/or instanced to be displayed simultaneously. Figure 5 also presented a good example of the ability of WM program/(GUI) for implementing a multiple tasks, where user could run the plotting window plus the input window, each window could display a different application (e.g., input/computing/output and plotting program), or each could display different files (e.g., input (text), image or spreadsheet files (output) that had been opened or created with a single application. Furthermore, user could start changing the input parameters or variant (A, B), to be calculated simultaneously in the plotting window this would lead for monitoring different output charts spontaneously using “right-click" popup menu, Fig. 5. Herein, user can draw all available output files, at the moment, with the ability of saving the different input and output files during the process of computations. The result is a large increase in the flexibility of computer use and a consequent rise in user productivity besides time consuming.
CONCLUSION
This work had successfully described a freely distributed open source presented as an easy to use graphical user interface (GUI) which had been produced to maintain and simplify the use of an existing complex to use FORTRAN programs adopted from a literature study. The GUI provides a control platform for linking in addition to managing the use of these complex programs as well as their input and output. Brief theoretical backgrounds were involved. Several utilities were allowable (e.g., viewing and plotting capabilities, file manipulation, editing as well as cloning the input parameters). Finally the source code could be used as a good example for software engineers GUI developers who are interested in creating GUI for FORTRAN by using Borland C++ Builder 6.
ACKNOWLEDGMENTS
We would like to thank Dr. Yousef Al Rjoub from Jordan University of Science and Technology, Amman, Jordan for offering us the FORTRAN code in order to design a suitable GUI; besides helping us in testing and evaluating the produced numerical results.
REFERENCES
- Goel, R.K. and A.K. Chopra, 1998. Period formulas for concrete shear wall buildings. J. Struct. Eng., 124: 426-433.
CrossRef - Berryman, J.G., 1980. Confirmation of biot's theory. Applied Phys. Lett., 37: 382-384.
CrossRefDirect Link - Bo, J. and L. Hua, 1999. Vertical dynamic response of a disk on a saturated poroelastic half-space. Soil Dyn. Earthquake Eng., 18: 437-443.
Direct Link - Biot, M.A. and D.G. Willis, 1957. The elastic coefficients of a theory of consolidation. J. Applied Mech., 29: 594-601.
Direct Link - Degrande, G., G. de Roeck, P. van den Broeck and D. Smeulders, 1998. Wave propagation in layered dry saturatedand unsaturated poroelastic media. Int. J. Solids Struct., 35: 4753-4778.
Direct Link - Halpern, M.R. and P. Christiano, 1986. Steady-state harmonic response of a rigid plate bearing on a liquidsaturated poroelastic half space. Earthquake Eng. Struct. Dyn., 14: 439-454.
CrossRefDirect Link - Jinting, W., Z. Chuhan and J. Feng, 2004. Analytical solutions for dynamic pressures of coupling fluid-solid-porous medium due to P wave incidence. Earthquake Eng. Eng. Vibr., 3: 263-271.
Direct Link - Lin, C.H., V.W. Lee and M.D. Trifunac, 2001. On the reflection of elastic waves in a poroelastic half-space saturated with non-viscous fluid. Report No. CE 01-04, University of Southern California, Department of Civil Engineering, California, USA., pp: 1-124. http://www.usc.edu/dept/civil_eng/Earthquake_eng/CE_Reports/PDF/CE_01_04.PDF.
- Liu, Y., K. Liu, L. Gao and T.X. Yu, 2005. Characteristic analysis of wave propagation in anisotropic fluid-saturated porous media. J. Sound Vibr., 282: 863-880.
Direct Link - Liu, Y., K. Liu and S. Tanimura, 2002. Wave propagation in tansversley isotropic fluid saturated poroelastic media. JSME Int. J. Ser. A, 45: 348-355.
Direct Link - Sari, M. and I. Demir, 2006. Wave modelling through layered media using the BEM. J. Applied Sci., 6: 1703-1711.
CrossRefDirect Link - Luco, J.E., M.D. Trifunac and H.L. Wong, 1987. On the apparent change in dynamic behavior of a nine story reinforced concrete building. Bull. Seismol. Soc. Am., 77: 1961-1983.
Direct Link - Clinton, J.F., S.C. Bradford, T.H. Heaton and J. Favela, 2006. The observed wander of the natural frequencies in a structure. Bull. Seismol. Soc. Am., 96: 237-257.
CrossRef - Udwadia, F.E. and M.D. Trifunac, 1973. Time and amplitude dependent response of structures. Earthquake Eng. Struct. Dyn., 2: 359-378.
CrossRef - Yahaya, N., N.M. Noor, S.R. Othman, L.K. Sing and M.M. Din, 2011. New technique for studying soil-corrosion of underground pipeline. J. Applied Sci., 11: 1510-1518.
CrossRefDirect Link - Sharma, M.D., 2004. 3-D wave propagation in a general anisotropic poroelastic medium: Reflection and refraction at an interface with fluid. Geophys. J. Int., 157: 947-958.
CrossRef - Stewart, J.P., R.B. Seed and G.L. Fenves, 1999. Seismic soil-structure interaction in buildings II: Empirical findings. J. Geotech. Geoenviron. Eng., 125: 38-48.
CrossRefDirect Link - Rajapakse, R.K.N.D. and T. Senjuntichai, 1995. Dynamic response of a multi-layered poroelastic medium. Earthquake Eng. Struc. Dyn., 24: 703-722.
CrossRefDirect Link - Roudsari, M.T. and M. Hosseini, 2011. Using neural network for reliability assessment of buried steel pipeline networks subjected to earthquake wave propagation. J. Applied Sci., 11: 3233-3246.
CrossRef - Senjuntichai, T., S. Mani and R.K.N.D. Rajapakse, 2006. Vertical vibration of an embedded rigid foundationin a poroelastic soil. Soil Dyn. Earthquake Eng., 26: 626-636.
Direct Link - Sharma, M.D. and M.L. Gogna, 1991. Seismic wave propagation in a viscoelastic porous solid saturated by viscous liquid. Pure Applied Geophys., 35: 383-400.
Direct Link - Todorovska, M.I. and Y. Al Rjoub, 2006. Plain strain soil-structure interaction model for a building supported by a circular foundation embedded in a poroelastic half-space. Soil Dyn. Earthquake Eng., 26: 694-707.
Direct Link - Todorovska, M.I. and Y. Al Rjoub, 2006. Effects of rainfall on soil-structure system frequency: Examples based on poroelasticity and a comparison with full-scale measurements. Soil Dyn. Earthquake Eng., 26: 708-717.
Direct Link - Todorovska, M.I., 1993. Effects of the wave passage and the embedment depth during building-soil interaction. Soil Dyn. Earthquake Eng., 12: 343-355.
Direct Link - Todorovska, M.I., 1993. In-plane foundation-soil interaction for embedded circular foundations. Soil Dyn. Earthquake Eng., 12: 283-297.
Direct Link - Vashishth, A.K. and P. Khurana, 2004. Waves in stratified anisotropic poroelastic media: A transfer matrix approach. J. Sound Vibr., 277: 239-275.
Direct Link - Mufti, L. and G. Jaeger, 1982. FORTRAN-should this be the engineer's computer language? Can. J. Civil Eng., 9: 477-482.
CrossRef - Greene, M., P. Grossi, S.K. Tubbesing, N. Basoz and R.J. Love, 2004. Learning from earthquakes: New directions and initiatives. Proceedings of the 13th World Conference on Earthquake Engineering, August 1-6, 2004, Vancouver, B.C., Canada.
Direct Link - Chikofsky, E.J. and J.H. Cross, 1990. Reverse engineering and design recovery: A taxonomy. IEEE Software, 9: 13-17.
CrossRefDirect Link - Parolai, S., S.M. Richwalski, C. Milkereit and D. Fah, 2006. S-wave velocity profiles for earthquake engineering purposes for the cologne area (Germany). Bull. Earthquake Eng., 4: 65-94.
CrossRef - Mucciarelli, M., A. Masi, M.R. Gallipoli, M.R.P. Harabaglia, M. Vona, F. Ponzo and M. Dolce, 2004. Analysis of RC building dynamic response and soil-building resonance based on data recorded during a damaging earthquake (Molise, Italy, 2002). Bull. Seismol. Soc. Am., 94: 1943-1953.
CrossRefDirect Link - Dunand, F., P. Gueguen, P.Y. Bard, J. Rodgers and M. Celebi, 2006. Comparison of the dynamic parameters extracted from weak, moderate and strong motion recorded in buildings. Proceedings of the 1st European Conference on Earthquake Engineering and Seismology, September 3-8, 2006, Geneva, Switzerland.
- Zembaty, Z., M. Kowalski and S. Pospisil, 2006. Dynamic identification of a reinforced concrete frame in progressive states of damage. Eng. Struct., 28: 668-681.
CrossRef - Deresiewicz, H. and J.T. Rice, 1962. The effect of boundaries on wave propagation in a liquid-filled porous msolid: III. Reflection of plane waves at a free plane boundary (general case), Bull. Seismol. Soc. Am., 52: 595-625.
Direct Link