
Ghassan Samara
Department of Computer Science, Faculty of Science and Information Technology, Zarqa University, Jordan
Wafaa A.H. Ali Alsalihy
School of Computer Science, Universiti Sains Malaysia, 11800 Penang, Malaysia
Information Technology Journal
Year: 2012 | Volume: 11 | Issue: 9 | Page No.: 1235-1242







ABSTRACT
Vehicular Ad hoc Networks (VANET) is one of the most challenging research areas in the field of mobile ad hoc networks. In this research, we propose a comparison between the emergency message broadcasting protocols and identifying the Pros and cons of each protocol.
PDF Abstract XML References Citation
Received: November 05, 2011;
Accepted: March 02, 2012;
Published: June 04, 2012
How to cite this article
Ghassan Samara and Wafaa A.H. Ali Alsalihy, 2012. Message Broadcasting Protocols in VANET. Information Technology Journal, 11: 1235-1242.
DOI: 10.3923/itj.2012.1235.1242
URL: https://scialert.net/abstract/?doi=itj.2012.1235.1242
DOI: 10.3923/itj.2012.1235.1242
URL: https://scialert.net/abstract/?doi=itj.2012.1235.1242
INTRODUCTION
Recent Year’s rapid development in wireless communication networks has made Car to Car (C2C) and Car to Infrastructure Communications (C2I) possible in Mobile Ad hoc Networks (MANETs). This has given birth to a new type of high mobile MANET called Vehicular Ad hoc Networks (VANET) creating a fertile area of research aiming for road safety, efficient driving experience and infotainment (Information and Entertainment).
Creating an efficient safety system on the road is a very important and critical concern for human today, each year nearly 1.3 million people die as a result of road traffic accidents more than 3000 deaths each day and more than half of these people are not travelling in a car, the injuries are about fifty times of this number (WHO, 2011), Malaysia also has its dangers with a very high per fatality rates 26 people per 100,000 are killed in traffic crashes, each year, there are about 6,300 fatal accidents as stated by the accidents’ statistics website (Accidents, 2011). The number of cars in 2004 is approximately estimated as 750 million cars around the world (Raya et al., 2006), with an annually constant increase by 50 million car around the world (Worldometers, 2011), with this constant raise, the estimated number of cars nowadays exceeding one billion, this raise the possibility to increase the number of crashes and deaths on the roads, road traffic accidents are predicted to become the fifth leading cause of death in the world, resulting in an estimated 2.4 million death each year as stated by WHO (2011), besides traffic congestion makes a huge waste of time and fuel, this makes developing an efficient safety system an urgent need on the road. The new techniques in this system should aim to make the intelligent vehicle to think, communicate with other vehicles and act to prevent hazards.
VANET safety applications depend on exchanging the safety information among vehicles (C2C communication) or between Vehicle to infrastructure (C2I Communication) using the control channel (Fig. 1).
VANET safety communication can be made by two means: Periodic Safety Message (called Beacon in this document) and Event Driven Message (called Emergency Message in this document), both sharing only one control channel. The Beacon messages are status messages containing status information about the sender vehicle like position, speed, heading …etc. Beacons provide fresh information about the sender vehicle to the surrounding vehicles in the network helping them to know the status of the current network and predict the movement of vehicles.
Emergency Messages are messages sent by a vehicle detect a potential dangerous situation on the road; this information should be disseminated to alarm other vehicles about a probable danger that could affect the incoming vehicles. VANET is a high mobile network where the nodes are moving in speeds that may exceed 120 km h-1, which means that this vehicle move 33.33 m sec-1, even if these vehicles are very far from the danger, they will reach it very soon, here milliseconds will be very important to avoid the danger. For instance, in 2008, a serial crash happened on the highway between Dubai and Abu Dhabi, involving 250 vehicles causing three deaths and 277 injured people, including, 10 serious injuries, again in the 2nd of April 2011, on the same highway, another serial vehicle crash. 127 vehicles crashed causing one death and 61 injured (Fig. 2).
When the first crash happened there should be a technique to alarm the incoming and speeding vehicles about this danger and this will save people’s lives and money. Sending the alarm to the incoming vehicles helps in conditions, especially when vehicles moving in high speeds, bad weather conditions and low road visibility.
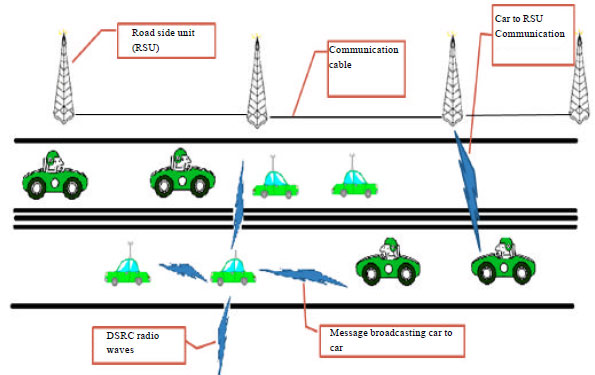 | |
| Fig. 1: | VANET structure |
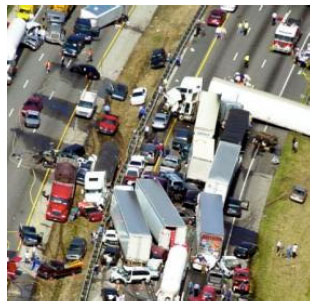 | |
| Fig. 2: | Dubai highway crashes 2011 |
Emergency messages in VANET are sent in broadcast fashion where all the vehicle inside the coverage area of the sender should receive the message. The coverage area is not enough as it is hardly reaches a 1000 m (which is the DSRC communication range) due to attenuation and fading effects. Away vehicles from the danger should receive this critical information to avoid the danger. Furthermore, the probability of message reception can reach 99% in short distances and can be as low as 20% at half of the communication range (Torrent-Moreno et al., 2004). Therefore, there should be a technique to increase the emergency message reception with high reliability and availability, furthermore, it is assumed that each vehicle equipped with a GPS device to retain the current position (Wang et al., 2008).
VANET broadcasting: Duo to the high mobility of vehicles, the distribution of nodes within the network changes rapidly and unexpectedly that wireless links initialize and break down frequently and unpredictably. Therefore, broadcasting of messages in VANETs plays a crucial rule in almost every application and requires novel solutions that are different from any other form of ad hoc networks. Broadcasting of messages in VANETs is still an open research challenge and needs some efforts to reach an optimum solution.
Broadcasting requirements are: high reliability and high dissemination speed with short latency in single-hop as well as multi-hop communications. Problems associated with regular broadcasting algorithms are: the high probability of collision in the broadcasted messages, the lack of feedback and the hidden node problem.
Using a predefined rout in MANET (Manickam and Shanmugavel, 2007; Lakshmi and Sankaranarayanan, 2006; Hussain et al., 2007; Dan-Yang et al., 2009) is not practical in VANET as vehicles always moving, thus, fixed routing techniques are useless.
In this study, we concerned with making a comparison for broadcasting the emergency message in VANET.
Emergency message broadcast: Several protocols are proposed considering dissemination of the safety information such as (Durresi et al., 2005; Costa et al., 2006; Biswas et al., 2006; Briesemeister et al., 2000) which intend to deliver the information to all vehicles within senders coverage area (up to 2000 m) with low delay. Durresi et al. (2005) authors propose building a hierarchical structure for the vehicles located in the same direction in order speed the dissemination of emergency message.
However, with the high mobility of VANET any hierarchical structure will not last long. Costa et al. (2006) authors proposed to choose the message forwarders depending on the use of a probabilistic method.
This approach is not proven to be a valid especially it depends on probability.
Furthermore, Mobility prediction method presented by (Meng et al., 2008) is not suitable in high mobile network like VANET.
Emergency message rebroadcast: Wu et al. (2010), authors proposed Transmission Range Adaptive Broadcast (TRAB) where the selection of the forwarders depends on choosing the vehicles that have the largest coverage area and can rebroadcast the message to a large number of vehicles.
This protocol depends on the forwarders’ coverage area. The coverage area for all vehicles depends on the transmission power and channel status. The transmission power for the emergency message is the highest and the channel status for the adjacent vehicles is the same. The coverage area for the vehicles depends on the progress from the original sender (Torrent-Moreno, 2007a), so there is no novelty in this protocol.
Another approach of study adopted by Weiner (2010) where authors proposed to broadcast the warning for none-mobile vehicles in a single hop and concentrated on how to deliver the information to the driver and how the driver will react to the warning message.
At this approach, authors didn’t give their attention on how the emergency message is broadcasted, furthermore, the vehicles are static, no mobility.
Ching-Yi and Shou-Chih (2010), proposed a street-based broadcast scheme that utilizes neighbor’s information by exchanging hello messages among vehicles, when any probable danger is detected, a warning message is broadcasted to all neighbors. The farthest vehicle is selected as a forwarder depending on the information gained from the hello message, if the preselected forwarder receives the message, it will rebroadcast it.
Depending on just one forwarder is not enough in a high mobile network like VANET. Furthermore, authors didn’t depend on beacons to gain the information. They proposed to use hello message, which creates a chance to increase the channel load.
The contention period schemes (which is a waiting time that the receiver waits before rebroadcasting the original message received from the sender) are proposed by many researchers (Qiong and Lianfeng, 2010; Biswas et al., 2006; Torrent-Moreno, 2007b; Torrent-Moreno et al., 2009; Qiong and Lianfeng, 2010; Biswas et al., 2006; Fubler et al., 2003; Briesemeister et al., 2000).
Qiong and Lianfeng (2010) authors proposed the Link-based Distributed Multi-hop Broadcast (LDMB), in which all the receivers of the emergency message are potential forwarders. Each forwarder computes and waits for contention time using Eq. 1, if the contention time ends the forwarder will start to rebroadcast the emergency message.
Torrent-Moreno (2007b) and Torrent-Moreno et al. (2009) where authors proposed position-based message forwarding strategy by sending the emergency message in a broadcast fashion and selecting the best forwarder available. All vehicles receiving that message are potential forwarders. In order to decide which node forwards the message all receivers will be assigned a contention window (waiting time); the contention window size will be the smallest for the farthest node and the biggest size for the nearest node, in other words, this protocol will give priority for the farthest node to be the next forwarder.
The problem of the last two protocols that all the message receivers will compute the waiting time and wait to make the rebroadcast even the closest vehicles to the sender will do and this will make the entire network vehicles busy for any message received.
Another protocol proposed by Torrent-Moreno (2007a) called Emergency Message Dissemination for Vehicular (EMDV) protocol, by enabling the farthest vehicle within the transmission range to make the rebroadcasting of the emergency message.
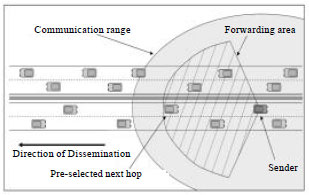 | |
| Fig. 3: | Sender utilizing EMDV |
Choosing one forwarder vehicle is not appropriate in a high mobile network like VANET as the position is always changing and the receiver vehicle may become out of range when sending the message or simply the receiver can’t receive the message because of the channel problems like jam or denial of service, Fig. 3.
Biswas et al. (2006) proposed that the receivers of the message will select random waiting times and make acknowledgment to avoid the re-transmissions from nodes closer to the original sender.
The acknowledgment scheme causes delay to the rebroadcast.
Fubler et al. (2003) proposed the Contention-Based Forwarding (CBF) protocol where a vehicle sends a packet as a broadcast message to all its neighbors. On receiving the packet, neighboring vehicle will contend for forwarding the packet. The node having the maximum progress to the destination will have the shortest contention time and will first rebroadcast the packet. If other nodes receive the rebroadcast message, they will stop their contention and delete the previously received message. This protocol mainly proposed for forwarding the periodic safety message (Beacons).
The problem of this protocol that there should be a management technique to manage the contention for all the neighboring vehicles and there is a chance that the nearest vehicle to the sender may not hear the rebroadcast of another vehicle, here this vehicle will rebroadcast the message and this called (hidden node problem (Khan et al., 2008) also it may lead to broadcast storm problem that makes the protocol useless.
Briesemeister et al. (2000) suggested that the emergency message will be rebroadcasted by the receivers located at farther distances from the sender by the selection of shorter waiting times, Eq. 1.
| (1) |
where, d is the distance from the original sender, MaxWT: maximum waiting time, Range: transmission range.
Emergency message rebroadcast by network segments: Another way to rebroadcast the message is to divide the network into segments proposed (Korkmaz et al. 2004; Fasolo et al., 2006; Zhou et al., 2010; Dai et al., 2009; Zorzi and Rao, 2003).
Korkmaz et al. (2004) proposed a protocol called Urban Multi-hop broadcast (UMB) aiming to maximize the message progress and avoid broadcast storm, hidden node and reliability problems. The protocol assigns the duty of forwarding and acknowledging the broadcast packets to only one vehicle by dividing the road portion inside the transmission range into segments and choosing the vehicle in the furthest non-empty segment without prior topology information. The source node transmits a broadcast control packet, called Request to Broadcast (RTB), which contains the position of the source and the segment size. On receiving the RTB packet, nodes compute the distance between the sender and the receiver. Then, nodes transmit a channel jamming signal, called black-burst, that contains several time-slots equal to their distance from the source (in number of segments): the farther the distance, the longer the black-burst. Each node transmits its black-burst and senses the channel; if there is no other black-burst in the channel it concludes that it is the farthest node from the source. Then the node returns a Clear-to-Broadcast (CTB) control packet, containing its Identifier (ID), to the source.
The Smart Broadcasting Protocol (Fasolo et al., 2006) addressed the same objective as UMB using a different methodology. Upon reception of a RTB message, each vehicle should determine its segment and set a random back-off time. Each segment has its own contention window size, i.e., if this segment has contention window size (4) TS (time-slot); vehicles in the furthest segment should randomly choose a back-off time between (0) to (3) TS. Vehicles in the next nearer segment choose a value between (4) to (7) TS and so on, as vehicles near the sender should wait for longer time.
Vehicles will decrement their backoff timers by one in each time-slot while listening to the physical channel. While waiting, if any vehicle receives a valid CTB message, it will exit the contention time phase and listen to the incoming broadcast. On the contrary, if any node finishes its backoff timer, it will send the CTB containing its identity and rebroadcast any incoming broadcast.
While, Zorzi and Rao (2003) proposed the Geographic Random Forwarding (GeRaF) protocol, which divides the network into equally adjacent sectors, the transmitter (source) elects the sectors starting from the farthest one, by sending RTB message, all the nodes in the elected sectors reply by CTB message, if one node reply the CTB message, then this node will become the next forwarder, if there are more than one node sent the CTB message the source issue a collision message and make a collision-resolution procedure to elect the next forwarder depending on a probabilistic rule.
Samara et al. (2011) proposed a novel technique aiming to enhance the performance of the emergency message by assigning the rebroadcast job to a limited number of vehicles and this to avoid the hidden node and the flood problems.
The criteria of selection depending on the vehicle’s progress and on the number of vehicles in the last none-empty segment and assure that the number is sufficient to carry the rebroadcast of the emergency message so the message will reach to a larger number of vehicles.
Other approaches: Another idea based on RTB and CTB presented by Yuanguo et al. (2010) where authors proposed a Cross Layer Broadcast Protocol (CLBP) in which the sender vehicle broadcasts an RTB packet to all neighboring vehicles and waits for the CTB packet from one of its neighbors, depending on the information received, the furthest node will be chosen as the forwarder of the emergency message and then. The emergency message will be broadcasted, when the preselected forwarder receives the emergency message, it will rebroadcast it, also it will send an acknowledgment for the original sender.
It is worth noting that, the potential forwarder vehicles wait the longest time before rebroadcasting the emergency message. The previously mentioned protocols are using the RTB and CTB handshake to select the forwarder before sending the message and this may lead to long latency, especially for saturated traffic situations.
Another approach adopted by Sommer et al. (2011), where authors proposed the Adaptive Traffic Beacon (ATB) in which vehicle utilizing the beacon message to send the emergency information, first. Vehicle detects a probable danger, then it will check the channel status, if the channel is idle, then it inserts the emergency information for the ready beacon and finally, it broadcasts the beacon.
This approach helps to reduce the channel load, bus sending the emergency information using the beacon gives lower priority to the emergency information, as the emergency message has the highest priority and should be processed first upon receive and receiving the emergency information with the beacon information may lead the receiver to mix between the information and ignore it in some times.
Korkmaz et al. (2004) proposed Based Broadcast (LBB) protocol, were the sender transmits a frame to all other vehicles and when the receiver receives the frame, it decides which action to take depending on the sender’s location and message type.
The protocol also depends on a repetition strategy to achieve a reliable delivery for the message broadcasted.
The main problem for this approach is that it is an only a single-hop broadcast; so the information will be broadcasted to a limited number of vehicles. It is unlikely that the protocol would support the multi-hop relaying of broadcast messages. If multi-hop relaying is used, as it would exhaust the network bandwidth.
Table 1 compares the previously mentioned protocols in the field of performance of the emergency message system.
| Table 1: | Comparison table for protocols in the field of performance of emergency message system |
  | |
CONCLUSION
In this study, we presented a comparison between various protocols, which aim to broadcast the safety information for other vehicles. A summary table for all the protocols also presented. We conclude that the traditional techniques in increasing the emergency message performance score good results, but there still a room for improvement and the intelligent approach should be adopted to give the vehicles better selection criteria and hence better probability in receiving and rebroadcasting the emergency message.
ACKNOWLEDGMENT
This work is part of Universiti Sains Malaysia short term grant No. 304/PKMP/6363/1090.
REFERENCES
- Biswas, S., R. Tatchikou and F. Dion, 2006. Vehicle-to-vehicle wireless communication protocols for enhancing highway traffic safety. IEEE Commun. Magazine, 44: 74-82.
CrossRef - Briesemeister, L., L. Schafers and G. Hommel, 2000. Disseminating messages among highly mobile hosts based on inter-vehicle communication. Proceedings of the IEEE Intelligent Vehicles Symposium, October 3-5, 2000, Dearborn, MI., USA., pp: 522-527.
CrossRef - Wu, X.W., W. Yan, S.M. Song and H.B. Wang, 2010. A transmission range adaptive broadcast algorithm for vehicular ad Hoc networks. Proceedings of the 2nd International Conference on Networks Security Wireless Communications and Trusted Computing (NSWCTC), April 24-25, 2010, IEEE, Wuhan, Hubei, pp: 28-32.
CrossRef - Torrent-Moreno, M., 2007. Inter-vehicle communications: Assessing information dissemination under safety constraints. Proceedings of the 4th Annual Conference on Wireless on Demand Network Systems and Services, January 24-26, 2007, IEEE, Oberguyrgl, pp: 59-64.
CrossRef - Ching-Yi, Y. and L. Shou-Chih, 2010. Street broadcast with smart relay for emergency messages in VANET. Proceedings of the 24th International Conference on Advanced Information Networking and Applications Workshops (WAINA), April 20-23, 2010, IEEE, Australia, pp: 323-328.
CrossRef - Yang, Q. and L. Shen, 2010. A multi-hop broadcast scheme for propagation of emergency messages in VANET. Proceedings of the 12th IEEE International Conference on Communication Technology, November 11-14, 2010, Nanjing, China, pp: 1072-1075.
CrossRef - Torrent-Moreno, M., J. Mittag, P. Santi and H. Hartenstein, 2009. Vehicle-to-vehicle communication: Fair transmit power control for safety critical information. IEEE Trans. Vehicular Technol., 58: 3684-3703.
CrossRef - Fubler, H., J. Widmer, M. Kasemann, M. Mauve and H. Hartenstein, 2003. Contention-based forwarding for mobile ad hoc networks. Ad Hoc Networks, 1: 351-369.
Direct Link - Korkmaz, G., E. Ekici, F. Ozguner and U. Ozguner, 2004. Urban multi-hop broadcast protocol for inter-vehicle communication systems. Proceedings of 1st ACM International Workshop on Vehicular ad Hoc Networks, October 1, 2004, Philadelphia, PA., USA., pp: 76-85.
CrossRef - Fasolo, E., A. Zanella and M. Zorzi, 2006. An effective broadcast scheme for alert message propagation in vehicular ad hoc networks. Proceedings of IEEE International Conference on Communications, Volume 9, June 11-15, 2006, Istanbul, Turkey, pp: 3960-3965.
CrossRef - Zorzi, M. and R.R. Rao, 2003. Geographic random forwarding (GeRaF) for ad hoc and sensor networks: Energy and latency performance. IEEE Trans. Mobile Comput., 2: 349-365.
CrossRef - Samara, G., W.A.H.A. Alsalihy and S. Ramadass, 2011. Increase emergency message reception in vanet. J. Applied Sci., 11: 2606-2612.
CrossRefDirect Link - Yuanguo, B., L.X. Cai, X. Shen and H. Zhao, 2010. A cross layer broadcast protocol for multihop emergency message dissemination in inter-vehicle communication. IEEE International Conference on Communications (ICC), May 23-27, 2010, IEEE, Cape Town, pp: 1-5.
CrossRef - Sommer, C., O.K. Tonguz and F. Dressler, 2011. Traffic information systems: Efficient message dissemination via adaptive beaconing. IEEE Commun. Mag., 49: 173-179.
CrossRef - Dai, Z., Z. Li, B. Wang and Q. Tang, 2009. An energy-aware cluster-based routing protocol for wireless sensor and actor network. Inform. Technol. J., 8: 1044-1048.
CrossRefDirect Link - Khan, I.A., E.Y. Peng, N. Javaid and H.L. Qian, 2008. Angle-aware broadcasting techniques for wireless mobile Ad hoc networks. Inform. Technol. J., 7: 972-982.
CrossRefDirect Link - Meng, L., W. Fu, Z. Xu, J. Zhang and J. Hua, 2008. A novel Ad hoc routing protocol based on mobility prediction. Inform. Technol. J., 7: 537-540.
CrossRefDirect Link - Wang, Y., T. Liang, X. Yang and D. Zhang, 2008. Scalable and effective cluster based routing algorithm using nodes location for mobile Ad Hoc networks. Inform. Technol. J., 7: 958-971.
CrossRefDirect Link - Zhou, L., G. Cui, H. Liu, D. Luo and Z. Wu, 2010. NPPB: A broadcast scheme in dense VANETs. Inform. Technol. J., 9: 247-256.
CrossRefDirect Link - Hussain, S.A., K. Mahmood and E. Garcia, 2007. Factors affecting performance of AODV. Inform. Technol. J., 6: 237-241.
CrossRefDirect Link - Lakshmi, M. and P.E. Sankaranarayanan, 2006. Performance analysis of three routing protocols in wireless mobile Ad hoc networks. Inform. Technol. J., 5: 114-120.
CrossRefDirect Link - Manickam, J.M.L. and S. Shanmugavel, 2007. Providing routing security using ros protocol in MANET and performance comparison with AODV. Inform. Technol. J., 6: 656-663.
CrossRefDirect Link - Dan-Yang, Q., M. Lin, S. Xue-Jun and X. Yu-Bin, 2009. SRRG: An effective self recovery routing game for mobile ad hoc network. Inform. Technol. J., 8: 1006-1012.
CrossRefDirect Link