
Ming Cong
School of Mechanical Engineering, Dalian University of Technology, Dalian, China
Yingha Wu
School of Mechanical Engineering, Dalian University of Technology, Dalian, China
Dong Liu
School of Mechanical Engineering, Dalian University of Technology, Dalian, China
Yu Du
School of Mechanical Engineering, Dalian University of Technology, Dalian, China
Haiying Wen
School of Mechanical Engineering, Dalian University of Technology, Dalian, China
Junfa Yu
NO.65053 Army, Dalian, China
Information Technology Journal
Year: 2011 | Volume: 10 | Issue: 2 | Page No.: 428-433







ABSTRACT
In order to improve control performance and eliminate steady, a coupling compensation for 6-DOF parallel robot is presented. Taking dynamic load Tank Simulator as the research object, this study analyzes the coupling of 6-DOC parallel robot considering the degree of freedom of the 6-DOF parallel robot. The coupling angle and coupling velocity are derived based on inverse kinematics model. The performance revolving stability, accuracy and robustness of the proposed coupling compensation control scheme for 6-DOF parallel robot is analysed in theory and computer simulation. These simulations show that the coupling compensation can improve the control performance and eliminate the steady state errors of tank simulator.
PDF Abstract XML References Citation
Received: June 11, 2010;
Accepted: August 19, 2010;
Published: November 12, 2010
How to cite this article
Ming Cong, Yingha Wu, Dong Liu, Yu Du, Haiying Wen and Junfa Yu, 2011. Simulation of 6-DOF Parallel Robot for Coupling Compensation Method. Information Technology Journal, 10: 428-433.
DOI: 10.3923/itj.2011.428.433
URL: https://scialert.net/abstract/?doi=itj.2011.428.433
DOI: 10.3923/itj.2011.428.433
URL: https://scialert.net/abstract/?doi=itj.2011.428.433
INTRODUCTION
Since, parallel structure is proposed by Stewart (1993), the 6-DOF parallel robot is one of the most popular cueing simulator mechanisms for its remarkable advantage over serial mechanisms (Huang et al., 2005; Yang et al., 2002), where a moving plate is connected to a base plate by six legs. The character of each leg influences the smoothness, accuracy and real-time of the moving plate. This perspective attracts a lot of research on error analysis and compensation.
Abdellatif and Heimann (2006) and Abdellatif et al. (2007) opened the discussion on the influence of Passive Joint Friction (PJF) in robot’s dynamics and its impact on control performance Meng et al. (2002) proposed a direct-error-compensation method of measuring the error of a six-freedom-degree parallel mechanism CMM. Yang et al. (2010) developed PD control with gravity compensation for hydraulic 6-DOF parallel manipulator. Cleary and Arai (1991) analyzed the influence of moving plate by the length of each of the six legs. Wang et al. (2007) studied the coupling characteristics of large hydraulic Stewart Platform. Li et al. (2009) compensates the interference of Stewart Platform based on inverse dynamic model. Besides, researchers often use software to simulate the moving of parallel robot (Ma et al., 2008; Iqbal et al., 2008; Liu et al., 2009). But there are few documents studied on the phenomenon of the coupling.
In this study, a coupling compensation is developed to improve the control performance including steady and moving precision via compensating each leg coupling errors. This study begins with a screw theory to analyze the motion characters of 6-DOF parallel robot. Then the Plücker system of leg is built, considering the degree of freedom of the 6-DOF parallel robot and the coupling angle and coupling velocity are calculated by a closed-solution inverse kinematics. The performance including stability, precision and robustness of the 6-DOF parallel robot with coupling compensation is analysed in theory and simulation. The controller with coupling compensation is used to Tank Simulator to prolong its lifetime.
COUPLING ANALYSIS
With reference to Fig. 1, which represents the 6-DOF parallel robot structure here considered, it can be observed that the moving plate and the base plate are combined with six legs which consist of upper gimbal, screw joint and lower gimbal.
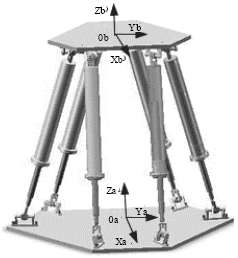 | |
| Fig. 1: | Model of 6-DOF parallel robot |
 | |
| Fig. 2: | Coordinate system of leg A1H1B1 |
One of the combined legs is taken to analyze its coupling based on screw theory.
It supposes that the coupling does not exist in each screw joint of legs, which means the screw joint, as same as translational joint, has only one translational motion. The frame (X, Y, Z) located at the center of the lower gimbal is shown in Fig. 2. The lower gimbal A1 contains two orthogonal rotational motion which are given in Plücker coordinates by:
| (1) |
| (2) |
The angle between the line of translational motion and the base plate is denoted by a, the angle between the X-axis and the line of A1BA which is the projection of A1B1 is denoted by β. Thus, the translational motion of screw joint is given in Plücker coordinates by:
| (3) |
The upper gimbal also contains two orthogonal rotational motions. Length of the leg A1B1 is denoted by L1, γ stands for the angle between the line of the upper gimbal center joint and the opposing lower gimbal center joint. Thus, the two orthogonal rotational motion of the upper gimbal can be calculated in Plücker coordinates as follows:
| (4) |
 | (5) |
| (6) |
 | (7) |
 | (8) |
| (9) |
Therefore, the screw system of leg A1H1B1 is given as:
 | (10) |
Thus the anti-screw system of leg A1H1B1 has 1 DOF which is denoted by:
| (11) |
where, P = 0, Q = 0. L, M, N can be expressed by R.
In the same manner, each of the leg has one constraint motion, the degrees of freedom of the moving plate is no more than 6. The result does not match with actual situation. While the anti-screw system of leg A1H1B1 has a rotational motion along the line of A1B1 when R = 0. It supposes that coupling exits in legs moving, the constraint of leg is released. Thus the moving plate has three translational motions and three rotational motions. Therefore, the coupling exits in each leg indeed.
COUPLING COMPENSATION
There are two frames describing the motion of the moving plate: an inertia frame (Xa, Ya, Za) located at the center of the base plate and a body frame (Xb, Yb, Zb) located at the center of the moving plate with Zb-axis pointing outward (Fig. 1). The length vector of the ith leg is calculated as:
| (12) |
where, AAi is the position of the lower joint Ai in the inertia frame, BAi is the position of the upper joint Bi in the inertia frame.
 | |
| Fig. 3: | One Leg of the 6-DOF parallel robot |
| (13) |
where, ATB is the transformation matrix form the body frame (Xb, Yb, Zb) to the inertia frame (Xa, Ya, Za), BiB is the position of the upper joint Bi in the plate body frame.
The leg can rotate around the axis of gimbal, while the upper part of the leg is sliding inside the lower part by an actuating force. This motion is considered by two frames: a leg fixed frame (Xni, Yni, Zni) located at the joint Ai with the Zni-axis parallel to the length vector of leg and Xni-axis parallel to the rotational axis of lower gimbal in outward, the leg body frame (Xmi, Ymi, Zmi) located at the same point with Xmi-axis parallel to the rotational axis of upper gimbal as shown in Fig. 3.
| (14) |
| (15) |
where, GAmi is the installation vector of the upper gimbal in the inertia frame, GAmi = ATBGBmi, GBmi is the installation vector of the upper gimbal in the plate body frame.
| (16) |
| (17) |
where, GAni is the installation vector of the lower gimbal in the inertia frame.
There are 2 DOF between the leg fixed frame (Xni, Yni, Zni) and the leg body frame (Xmi, Ymi, Zmi): one translational motion alone Zni-axis and one rotational motion around Zni-axis. The coupling angle ψi is then calculated as:
| (18) |
where, ψi is positive number when XmixXni have the same direction with LAi, otherwise ψi is negative number.
The angular velocity ωsi of coupling is given as:
 | (19) |
where,
 |
J is the Jacobian matrix of the general velocity of the moving plate to the velocity of the upper attachment points.
The difference of the ith leg between practice and theory Δi is computed as:
| (20) |
where, Da is the screw-pitch.
Therefore, the practical length of the ith Lt is given as:
| (21) |
where, Δpi is the difference of the ith leg between practice and theory in the previous moving plate position.
RESULTS
Model simulation is a simple and effective to verify proposed method or system that many researchers used (Aqel, 2006; Eker et al., 2002). This study takes Tank Simulator which base on 6-DOF parallel robot as the simulation model. Each leg of the 6-DOF parallel robot has an upper part sliding inside a lower part to imitate the physical feeling of driving a Tank for the three translational motions (surge, sway and heave) and the three rotational motions (pitch, roll and yaw). Coupling compensation has been used in order to guarantee against numerical problems in the solution process.
 | |
| Fig. 4: | Rotational angle on Z-axis |
| Table 1: | Parameters of the tank simulator |
 | |
All parameters of the 6-DOF parallel robot configuration and the initial conditions, which are kept invariable during the simulation, refer to Table 1.
It investigates two controlling curves (the compensation controlling curves and the un-compensation controlling curves) to test the precision of the coupling compensation. Taking the actuator velocity which makes the moving plate of rotated around Za-axis to make the sinusoidal motion which amplitude is 30° as the input of 6-DOF parallel robot model, this study analyzes performance of Tank Simulator. Without the coupling compensation, 6-DOF parallel robot generates an extra moving on the direction of Z-axis. Rotated angle with coupling compensation and without coupling compensation of Z-axis is shown in Fig. 4. Besides, Fig. 5 and Fig. 6 show the translational velocity and acceleration on Z-axis.
From the experiment results, it is obvious that the motion on command direction according to preconceived track with accurate amplitude and period, but the 6-DOF parallel robot generate an extra moving along with Z-axis which can causes vibration of Tank Simulator that can not neglect. All coordinate values, especially the Z coordinate value, decreased dramatically after the coupling compensation of 6-DOF parallel robot. The variation of moving velocity on Z-axis after the compensation was tends to zero; acceleration has decreased from 225 mm sec-2 to almost zero. In the same manner, taking the rotation of X-axis or Y-axis as the research process, the translational error on X-axis or Y-axis decreased dramatically.
 | |
| Fig. 5: | Moving speed of Z-axis |
 | |
| Fig. 6: | Moving acceleration of Z-axis |
 | |
| Fig. 7: | Movement distance on X-axis |
Movement distance on X-axis and Y-axis are shown as Fig. 7 and Fig. 8. After considering the coupling compensation of the controller, the vibration of Tank Simulator (Fig. 9) has decreased and the stability has improved.
 | |
| Fig. 8: | Movement distance on Y-axis |
 | |
| Fig. 9: | Photo of Tank Simulator test prototype |
Therefore the lifetime of the Tank Simulator can be prolonged.
CONCLUSIONS
In this study, the motion of 6-DOF parallel robot is studied base on screw theory. The following conclusions can be drawn:
| • | Due to analysis of the legs of 6-DOF parallel robot model, there exists coupling between the six degrees of freedom. In this study, it builds the coupling velocity and acceleration. Besides, the coupling compensation is proposed to optimize the moving track |
| • | Mechanism-model combined motion method which is presented in this study considers the influence of the motion controller and actuator that can improves the reliability and authenticity of 6-DOF parallel robot |
| • | Experimental results show that the precision can be increased by the coupling compensation. It eliminates jitter in the motion that can prolong life of Tank Simulator |
REFERENCES
- Huang, Q., H. Jiang, S. Zhang and J. Han, 2005. Spacecraft docking simulation using hardware-in-the-loop simulator with Stewart platform. J. Mech. Eng., 18: 415-418.
Direct Link - Abdellatif, H. and B. Heimann, 2006. On compensation of passive joint friction in robotic manipulators: Modeling, detection and identification. Proceedings of the IEEE International Conference on Control Applications Computer Aided Control System Design, Oct. 4-6, Munich, pp: 2510-2515.
CrossRef - Abdellatif, H., M. Grotjahn and B. Heimann, 2007. Independent identification of friction characteristics for parallel manipulators. J. Dyn. Syst. Meas. Control, 129: 294-302.
Direct Link - Meng, Z., R.S. Che, Q.C. Huang and Z.J. Yu, 2002. The direct-error-compensation method of measuring the error of a six-freedom-degree parallel mechanism CMM. J. Mater. Process. Technol., 129: 574-578.
CrossRef - Yang, C., Q. Huang, H. Jiang, P.O. Ogbobe and J. Han, 2010. PD control with gravity compensation for hydraulic 6-DOF parallel manipulator. Mech. Machine Theory, 45: 666-677.
CrossRef - Wang, W., H. Xie, X. Fu and H. Yang, 2007. Coupling characteristics of large hydraulic stewart platform. J. Mech. Eng., 43: 12-15.
Direct Link - Li, Q., X. Wang and J. Cheng, 2009. Interference force compensation of stewart platform based on inverse dynamic model. J. Mech. Eng., 45: 14-19.
Direct Link - Ma, J., J. He, H. Xiong and J.W. Han, 2008. Simulation of coupling characteristic of hydraulically driven stewart platform based on dynamics model. Proceedingsof the International Workshop on Modeling, Simulation and Optimization, Dec. 27-28, Hong Kong, pp: 88-92.
Direct Link - Iqbal, S., A.I. Bhatti and Q. Ahmed, 2008. Determination of realistic uncertainty bounds for the stewart platform with payload dynamics. Proceedings of the IEEE International Conference on Control Applications, Sept. 3-5, San Antonio, TX., pp: 995-1000.
CrossRef - Liu, S., W.L. Li, Y.C. Du and J. Song, 2009. Dynamic simulation of submarine Stewart platform. J. Harbin Instit. Technol., 41: 249-255.
Direct Link - Aqel, M.M., 2006. A simulation technique for engineering control systems. J. Applied Sci., 6: 157-162.
CrossRefDirect Link - Eker, I., M. Tumay, T. Kara and M.J. Grimble, 2002. Operation and simulation of a water supply system. J. Applied Sci., 2: 702-709.
CrossRefDirect Link - Stewart, D., 1993. A platform with six degrees of freedom: A new form of mechanical linkage which enables a platform to move simultaneously in all six degrees of freedom developed by Elliott-Automation. Aircraft Eng. Aerospace Technol., 38: 30-35.
CrossRefDirect Link