
Luobei Kuang
Computer School, National University of Defense Technology, Changsha 410073, China
Zhijun Wang
Department of Computing, The Hong Kong Polytechnic University, Hong Kong
Ming Xu
Computer School, National University of Defense Technology, Changsha 410073, China
Yingwen Chen
Computer School, National University of Defense Technology, Changsha 410073, China
Information Technology Journal
Year: 2011 | Volume: 10 | Issue: 11 | Page No.: 2060-2067







ABSTRACT
Vehicular networks are becoming an important way to provide various services. As the broadcast is highly used in vehicular networks, there is a need to study the performance of the broadcast protocols. This study aims to investigate the IEEE 802.11 broadcast protocol performance in the highly mobile vehicular network environments. In this study, we firstly propose a zone based system model to catch up the vehicle mobility and then develop performance models based on analysis of vehicle DCF broadcast behaviors. Based on the models, we figure out the impact of the mobility. The effectiveness validation of the developed models is also verified by simulations.
PDF Abstract XML References Citation
Received: June 28, 2011;
Accepted: August 10, 2011;
Published: September 23, 2011
How to cite this article
Luobei Kuang, Zhijun Wang, Ming Xu and Yingwen Chen, 2011. Performance Study of IEEE 802.11 Broadcast Protocols in Vehicular Networks. Information Technology Journal, 10: 2060-2067.
DOI: 10.3923/itj.2011.2060.2067
URL: https://scialert.net/abstract/?doi=itj.2011.2060.2067
DOI: 10.3923/itj.2011.2060.2067
URL: https://scialert.net/abstract/?doi=itj.2011.2060.2067
INTRODUCTION
As vehicles are convenient tools for people travelling everyday, vehicular networks are becoming more and more important in people’s daily life and have been widely investigated recently. With high speed Access Points (APs) are being deployed along roads, vehicles can communicate with other vehicles as well as the APs when they are moving along the road. Hence the mobile users in vehicles can conveniently report traffic information, acquire travel information, even access the Internet.
Many communication protocols have been proposed to improve the communication performance in vehicular networks (Ott and Kutscher, 2004; Hull et al., 2006; Balasubramanian et al., 2008; Eriksson et al., 2008; Hadaller et al., 2007; Zhao et al., 2008; Karamad and Ashtiani, 2008; Sikdar, 2008). Among these, the broadcast schemes (Fasolo et al., 2006; Yang and Chou, 2008; Bavithiraja, 2009) are noticeable for their key use in traffic reporting, accident warning, information enquiry, Internet access, etc. The IEEE 802.11 broadcast protocol and its variants are the most popular schemes in vehicle networks because their easy deployment through commercial 802.11 products. Several works (Wang et al., 2009; Ma and Chen, 2008) have investigated the performance of IEEE 802.11 broadcast scheme in ad hoc networks. But they cannot account for the performance in the vehicular networks because they generally have their own salient mobility and communication characteristics different from ad hoc networks. To our best knowledge, there has been no analysis study of the IEEE 802.11 broadcast in vehicular networks so far.
This study focuses on the performance study of IEEE 802.11 broadcast in vehicular communication environments. The broadcast scenario we refer to in this study is that any vehicle just broadcasts its request or enquire message to its neighboring APs. Our analytical model considers vehicle mobility, transmission rate diversity and IEEE 802.11 broadcast transmission behaviors. We firstly present a zone based system model to catch up the vehicle mobility and then discuss the transmission rate diversity of the moving vehicles. Then we propose a three-dimension Markov chain model to catch up the vehicle broadcast access behaviors at the MAC layer. Finally, we derive some related analytical expressions of performance metrics and verify them by simulations.
PRELIMINARY
In wireless networks, a channel rate over a link can be adaptively selected based on the link signal quality. This adaptive rate selection has been widely adopted by the 802.11 products. Therefore, a wireless node can dynamically adjust its transmission rate based on its received signal power to the noise ratio. Suppose the noise power is a constant, then a channel rate is determined by the received signal power. According to the wireless radio propagation characteristic, the relationship between signal strength and the distance of two communicating vehicles under realistic scenario (which can be modeled as Shadowing model) can be expressed as (Rappaport, 2002):
| (1) |
where, Pr is the receiving signal strength in a wireless node, c is a constant related to antenna characteristics and the average channel attenuation, d is the distance away from the sending node and θ is the path loss exponent. σdB is a standard deviation of a Shadowing model variation which is used to reflect the communication probability at some distance. α is a random variable takes value in (0, 1). N-1(·) is the reverse function of normal distribution function.
A selected channel rate is uniquely determined by the maximum distance between a sender and a receiver. If the distance is larger than the maximum value, the communication pair may use a lower channel rate to transmit data. In other words, a distance can uniquely determine a maximum channel rate. Therefore, for any distance d which satisfies dk<d = dk-1, the maximum available transmission rate is Rk-1. Suppose the SNR threshold value for Rk is ThRk and the noise level is Pn, then the maximum distance corresponding to the channel rate Rk can be evaluated as:
 | (2) |
Applying Eq. 2, we can calculate the maximum distance for each channel rate.
SYSTEM MODEL
Zone-based system model: We consider the scenario that the vehicles move along the roads as shown in Fig. 1. Similar to the study by Tonguz et al. (2009), the road is presented as a line of cells, each with length l (usually longer than the vehicle length and shorter than the twice of the vehicle length). Each cell can either be empty or be occupied by a vehicle. The coordinate of cell i is denoted as xi = i·l. Suppose the average vehicle density is λ (vehicles/cell) (which is determined by the average vehicle arrival rate and velocity). The probability of a vehicle to exist in a cell is denoted by p = λ.
Suppose that every vehicle has the same maximum communication range, denoted by CRm. Initially a vehicle cannot communicate with the AP (out of the communication range of the AP) or communicate with a very low transmission rate (located at the border of the communication range to the AP) due to the long distance, then the vehicle will select a relay path to forward its requests to the AP, the path may have one or more hops. After the vehicle moves into a point which is closer to the AP, it can directly communicate with the AP to obtain high throughput. We mark this special point as the critical point (such as the points A and -A in Fig. 1) whose coordinate is obtained in zone division. Based on the different access phases (hop number) within the movement, we divide the road into spatial zones as shown in Fig. 1.When the critical point is determined, we can easily get the position B(-B) which is CRm away from A(-A). Similarly, we can determine the points which are CRm away from the previous points, The process is repeated till the requesting vehicle is in the inter-zone between two neighbor points. We define zone 0 as the requesting vehicle locates at and zone i between two consecutive points (e.g., zone 1 is determined by -B and -A in Fig. 1).
For a requesting vehicle moving close to the AP in zone i, it first selects a relay vehicle in zone i or zone i+1, then the relay vehicle selects a relay vehicle in zone i+1 or zone i+2,…, the vehicles in the zone nearest to the AP are candidates for the last relay node to forward packets to the destination AP.
 | |
| Fig. 1: | System model for moving vehicles |
If there is no relay vehicle in the next zone, the requesting vehicle selects the furthest vehicle in its own zone as a relay vehicle. The process of the vehicles moving away from the AP is similar. With vehicles traversing consecutive APs along the road, they are considered to transit iteratively among the zones in Z (the set of spatial zones). When vehicles move closer to the next AP, it enters to zone 0. The movement of vehicles is then represented by the zone transitions using a Markov chain model in which each state corresponds to a spatial zone. The time that the vehicles stay in each zone zε Z is assumed to be geometrically distributed with average duration of tz orhich is determined by the length of the partition zone, lz and the average moving velocity of vehicles, v and tz = lz / v. Within a small duration, e.g., Δ, vehicles either move to the next zone with probability Δ/tz or remain in the current zone with the probability 1-Δ/tz.
With the zone division, a vehicle in a zone determines its transmission rate based on the distance from the furthest communication vehicle as mentioned above. To increase the system throughput, the vehicle is assumed to actually use the maximum achievable rate given the distance d. Then the transmission rate can be dynamical changed as the distance changes. Suppose a vehicle has J different transmission rates R0, R1, …, RJ-1 in ascending order. Initially, when a vehicle enters into a zone, the transmission rate should be the minimum rate R0. The rate is also set to R0 when the furthest vehicle is moving out of the communications range of the requesting vehicle. Then the rate may switch to one of the other J-1 rates according to d. As d changes, the vehicle increases/decreases the rate to the neighbor rate. Suppose the transmission rate at time t is Rk, then for the probability distribution of distance d can be regarded as uniform in (dk+1, dk), the requesting vehicle may change its transmission rate to Rk-1 at t+Δ,in case that the furthest relay vehicle’s velocity (denoted by v2) is larger than that of the requesting vehicle (denoted by v1) and the new distance after a small duration Δ, d+| v2- v1|Δ, is in (dk, dk-1). Suppose the vehicle velocity is in (VMin, VMax). Then we can get the probability that rate Rk changes to Rk-1 is:
Similarly, the probability that rate Rk changes to Rk+1 is also:
Here, we get the result by considering both vehicles are moving in the same direction. We also can obtain the probabilities when both vehicles are moving towards each other which incurs to that the transmission rate increases gradually. The state transition will be a little different from that in Fig. 2.
In a zone, a requesting vehicle usually accesses the channel to transmit their packets through broadcast using IEEE 802.11 DCF scheme in which the vehicle backoffs when channel is busy and transmits packets when channel is idle and the backoff time is out.
 | |
| Fig. 2: | Three-dimensional Markov chain for vehicle broadcast in zone Z |
In the scheme, the backoff time varies as the channel usage changes. For simplicity, we assume that at any time when the vehicle transmission rate changes, the elapsed time is very short so that the transmission status is not changed. Also, the transmission status can be inherited from the previous zone when the vehicle passes to a new zone but the backoff timer deduction is not influenced.
Zone division: The main work for the zone division is to calculate the critical point A which can be done by the requesting vehicle. Suppose there is a vehicle T between the AP and A which satisfies:
| (3) |
where, EETx-y denotes the end-to-end transmission delay from a vehicle or an AP located at x to that at y. B/2 is the average number of queuing packets in the buffer of the vehicle at T. B denotes the average buffer size of the BC on a vehicle. Each vehicle in the coverage of the AP periodically broadcasts its number of queuing packets in its buffer to the AP and then the AP broadcasts a beacon message including this information to the newly arriving vehicles.
Suppose the coordinate of A is x and the coordinate of the AP is 0, then the expected coordinate of T (denoted by CT) is:
| (4) |
The distance between A and the AP, A and T, T and the AP can be derived as (the position of A and the AP can be obtained from the GPS device on the vehicle):
 | (5) |
The maximum channel rate (RA-AP, RA-T, RT-AP) for each distance can be obtained from zone division. Then, Eq. 3 can be written as:
| (6) |
where, L is the payload of a vehicle. Then, the coordination x of the critical point A can be solved. With the coordination of A, we can subsequently obtain the coordination of each zone boundary.
MAC ACCESS MODEL
MAC access model: To evaluate the DCF broadcast performance of individual vehicle, we randomly examine a requesting vehicle and represent its status by a discrete three-dimensional Markov chain {Z (t), R (t), B (t)} at time slot t. Here Z(t) (its values in the range (0, 1, ..., n)) denotes the spatial zone that the node is currently in; R(t) (its values in the range (0,1, …, J-1), stands for (R0, R1, …, RJ-1)) denotes the transmission rate at the current time slot; and B (t) (its values in the range (0,1,…, W-1), W is the maximum number of backoff slots) denotes the backoff time of the requesting vehicle node at the current time slot using DCF broadcast. Slot times t and t+1 correspond to the beginning of two consecutive status of the node. The state transition diagram of the three-dimensional Markov chain is shown in Fig. 2. It is designed based on the model in (Ma and Chen, 2008). Note that the duration between any two time slots is a random variable because the backoff time of a node could be frozen for a random period. Therefore, a slot here may be a virtual slot which does not directly map to the real system time.
Our model is distinct from the model in (Ma and Chen, 2008) by considering the vehicle mobility and transmission rate diversity in three aspects. Firstly, after the deduction of the backoff time, the requesting vehicle node either stays in the current zone or moves to the next zone with new transmission probabilities. Secondly, a vehicle node will switch to the lowest transmission rate when it reaches the next zone. A vehicle also can change its transmission rate in each zone. Lastly, the backoff value smoothly changes independently on the transmission rate and zone switch. The transmission history will be inherited in the new zone.
Given tz, zεZ, the one-step non-null transition probabilities of the Markov chain from time slot t to t+1 are:
 | (7) |
where, ps,z is the probability that a node transmits in a slot time. E (Tslot) is the average duration of one time slot. E (Ts,z) is the average time of one successful transmission of the node in zone z.
In Eq. 7 (a) calculates the probability that the node remains in the original zone after its backoff time decreases and keeps the transmission rate unchanged.
is the probability of unchanged rate; (b) is for the probability that the node passes to a new zone after its backoff time decreases; (c) calculates the probability that the node transmits successfully and starts a new round of backoff when stays in the original zone.
is the probability that the node remains in the same zone during the transmission time; (d) gives the probability that the node transmits successfully and starts a new round of backoff when it enters to a new zone; (e) and (f) calculate the probabilities that the transmission rate increase and decrease without zone switch, respectively and the rate switch probability is:
(g) is the transition probability when the rate is at the maximum rate; (h) is the probability that the node adjusts its rate by considering its relay nodes when it enters to a new zone.
is the probability by the node selecting rate Rr. Through solving its according balancing equations, we can obtain each steady state probability by ps,z, E (Tslot) and E (Ts,z). Then we compute the related parameters, E (Tslot) and E (Ts,z).
Let σ be the unit backoff slot time duration in DCF. It is assumed that a packet holds size P with an average packet length E (P) and that the packet header includes the physical layer header plus the MAC layer header: LH = PHYhdr+MAChdr. Let Δ be the propagation delay and DIFS be the time period for a distributed inter-frame space. The average transmission rate in zone z is denoted by E (Rz) and
Then, we have:
| (8) |
• | ps,z: Let pt,z denote the conditional transmission probability given that nodes are in zone z. Then: |
| (9) |
The conditional probability that the channel is busy given that nodes are in zone z can be further derived as:
| (10) |
where, λ lz denotes the number of nodes in zone z. Also, ps,z can be derived as:
| (11) |
| • | E (Tslot): The average duration of one time slot includes the unit backoff time σ and the average frozen duration of the backoff time E (Tfrozen). |
Let τz(i) (i = 1, 2, . . .) be the probability that a station transmits i number packets consecutively in a virtual slot. Evidently, we can get
Therefore, probability pb,z(i) that the channel is busy in the ith frozen stage is ![]() . Then the average frozen stages E (Nfrozen) can further be derived as:
. Then the average frozen stages E (Nfrozen) can further be derived as:
| (12) |
Then the E (Tslot) can be expressed as:
| (13) |
where, E (Tc,z) denotes the average time of one transmission collision of the node in zone z and can be derived as:
Performance derivation
Average saturation throughput: The average saturation throughput E (Sz) in zone z for a node broadcasting a packet is the number of packets per node per unit time. It can be evaluated as the amount of packet payloads sent by individual node in each transmission slot.
| (14) |
The average system saturation throughput E (S) can be expressed as:
 | (15) |
Average saturation delay: The average saturation delay E (Dz) in zone z for a node broadcasting a packet is given by the time that the packet is delayed for each successful transmission. It can be evaluated by multiplying the average number of virtual slots used for a successful transmission by the average length of a virtual slot time. That is:
| (16) |
where, X denotes the random variable representing the number of virtual slots for a successful transmission. As we know, the backoff time for each packet is selected in the range {0, 2, . . .,W-1}. Therefore, E (X) = W/2. Further, the average system saturation delay E (D) is:
| (17) |
MODEL VERIFICATION
This Section verifies the effectiveness of our model by NS-2 simulation. Some parameters are listed in Table 1. The vehicles are supposed to be in the saturation mode to transmit packets.
Simulations are conducted under the real street map of Afton Oaks area, Houston, Texas, USA, a 1900 m*1900 m area. The map data is obtained from publicly available TIGER database from the US Census Bureau. We set up APs randomly on the middle of roads in the map. For simplicity, we ignore the traffic jam effect in the movement model. We set 8 different lines for vehicles to move, most of them has a portion of common roads.
| Table 1: | Simulation parameters |
 | |
Vehicles are generated at the initial position of its own line and the simulator continuously generates vehicles during the simulation time. Once a vehicle is generated, it keeps a constant velocity to move along the line. When a vehicle reaches its destination, it moves back along the route towards its starting station. Every vehicle follows a Poisson arrival process for their data request. We also set the number of data sources as 20% of the total vehicle number to decrease the serious collisions. We firstly fix the average vehicle velocity as 30 km h-1 and the standard deviation is 10 km h-1 (i.e., vehicle velocity is in (20, 40 km h-1)) to examine the performance under different vehicle arrival rate and different maximum backoff value. Then we fix the average vehicle arrival rate to be 1 vehicle/sec to examine the performance under different velocity (denoted by the change of the average velocity) and different maximum backoff value as follows.
Performance under different vehicle arrival rate: Figure 3 shows the average saturation throughput and delay under different average vehicle arrival rate and different maximum backoff values. As we can see, the analytical model is highly accurate. As the arrival rate increases, the number of vehicles in the road segment increases. Then the collision in each zone increases orhich incurs to the decrease of the throughput and increase of the delay. Furthermore, increasing the maximum backoff value helps improve the throughput performance, matching the results in (Ma and Chen, 2008).
Performance under different vehicle velocity: Figure 4 demonstrates the performance under different vehicle velocity and different maximum backoff values. The analytical results also coincide much with the simulation results. As the average vehicle velocity decreases, the performance becomes worse dramatically. This is due to that as velocity increases, the collision probability increases in each zone as shown in Fig. 5.
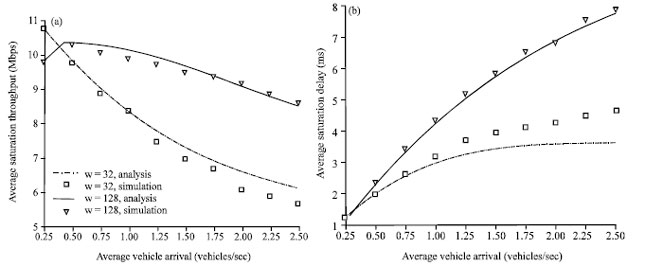 | |
| Fig. 3 (a-b): | Performance under different vehicle arrival rate. (a) Average saturation throughput and (b) Average saturation delay |
 | |
| Fig. 4 (a-b): | Performance under different vehicle velocity |
 | |
| Fig. 5: | Collision probability |
Therefore, we can conclude that the broadcast performance of vehicular network is influenced much by the enhanced mobility orhich is not referred in previous broadcast performance analysis in ad hoc networks.
CONCLUSION
Vehicular network is a widely investigated network and moving vehicles usually communicate with each other through broadcast services. The mobility makes the performance of broadcast in vehicular networks different from that in ad hoc networks. There is no analytical model on the analysis of broadcast services of IEEE 802.11 in vehicular networks so far. This study focuses on the performance analysis of IEEE 802.11 broadcast under vehicular communication environments. We consider the analysis through combining vehicle mobility and transmission rate diversity to propose a three-dimension Markov chain model. From the Markov chain, we derive the analytical expressions of average saturation throughput and delay. The effectiveness is validated through simulation results.
In the future work, we will focus on the performance analysis with the QoS consideration for different kind of broadcast services in vehicular networks.
ACKNOWLEDGMENTS
This research is partially supported by the National Science Foundation of China under Grant No. 60773017 and t No. 61003304.
REFERENCES
- Karamad, E. and F. Ashtiani, 2008. A modified 802.11-based MAC scheme to assure fair access for vehicle-to-roadside communications. Comput. Commun., 31: 2898-2906.
CrossRef - Fasolo, E., A. Zanella and M. Zorzi, 2006. An effective broadcast scheme for alert message propagation in vehicular ad hoc networks. Proceedings of IEEE International Conference on Communications, Volume 9, June 11-15, 2006, Istanbul, Turkey, pp: 3960-3965.
CrossRef - Ma, X. and X. Chen, 2008. Performance analysis of IEEE 802.11 broadcast scheme in Ad Hoc wireless LANs. Trans. Veh. Technol., 57: 3757-3768.
CrossRef