
Chao-Chi Chan
Department of Mechanical Engineering, National Taiwan University of Science and Technology, Taipei, Taiwan
Shuen-Ren Yu
Department of Mechanical Engineering, National Taiwan University of Science and Technology, Taipei, Taiwan
Information Technology Journal
Year: 2011 | Volume: 10 | Issue: 9 | Page No.: 1740-1746







ABSTRACT
Because the volume of web resources (web pages, images, music, video, etc.) continues to increase exponentially, enabling reuse and sharing of creative knowledge in engineering domain becomes our driving force to develop the knowledge map navigation. Map navigation is a way of organizing the world's information geographically. Knowledge maps are used to visualize a set of related information. To solve problems of knowledge sharing and knowledge reusing in engineering domain, this study proposed a knowledge map navigation which is based on functional ontology and concept maps. At last, a case study on contest robot is applied to demonstrate the proposed model can promote the information searching more efficiently. In order to share the functional knowledge model anywhere on the Internet, we use CmapTools which allow users to construct, navigate, share and criticize knowledge models represented as concept to implement that. It shows some benefits from functional ontology-based applications in engineering knowledge management domain.
PDF Abstract XML References Citation
Received: February 22, 2011;
Accepted: May 17, 2011;
Published: July 27, 2011
How to cite this article
Chao-Chi Chan and Shuen-Ren Yu, 2011. Functional Ontology and Concept Maps for Knowledge Navigation: An Application Example for Contest Robot. Information Technology Journal, 10: 1740-1746.
DOI: 10.3923/itj.2011.1740.1746
URL: https://scialert.net/abstract/?doi=itj.2011.1740.1746
DOI: 10.3923/itj.2011.1740.1746
URL: https://scialert.net/abstract/?doi=itj.2011.1740.1746
INTRODUCTION
Because the volume of web resources continues to increase exponentially, there is a recognized need for advanced strategies that will enable resources to be interpreted more logically by search engines and other intelligent agents (Chen et al., 2008). The navigation through hundreds of the documents in order to find the interesting information is a tough job and waste of the time and effort (Binwahlan et al., 2009). As such, there are many individuals and organizations beginning to explore the integration of semantic web strategies into their future web development activities (Zhu et al., 2009). Enabling reuse and sharing of creative knowledge in engineering domain becomes our driving force to develop the knowledge map navigation.
Map-based navigation seems quite natural to humans because using a map is a very convenient way to describe an environment and to share it with other people (Yanqing et al., 2010). Knowledge visualization and retrieval are the key techniques to implement effective knowledge management (Chung et al., 2010).
A knowledge map is generally a visual representation of “knowledge about knowledge” rather than of knowledge itself. It basically helps to detect the sources of knowledge and structure of knowledge by representing the elements and structural links of application domains. Some kind of knowledge map structure can be found in literature are: hierarchical/radial knowledge map, networked knowledge map, knowledge source map and knowledge flow map. Li and Lu (2010) organized knowledge resources based on Intelligent Topic Map (ITM) which extends the conventional topic map in structure and enhances its reasoning functions. ITM establishes a novel multi-resource knowledge organization model which depicts the hierarchical relationship of cluster-topic-knowledge element-occurrence.
The challenge for the visual representation of the knowledge maps is to develop a visual tool for both navigating a large information space as well as for discovering possible contexts and relationships between groups of items. In our model, there are two major ways to enable the sharing of knowledge between users (Fig. 1).
As a matter of fact, some research effort has been attempted to employ ontology-based techniques in manufacturing or in the production domain for integrating engineering applications. Wei et al. (2009) developed an Ontology-based Manufacturing Design System (OMDS) to present the PKM (Product Knowledge model), realizing semantic match and enhancing the performance of organization capability and knowledge sharing.
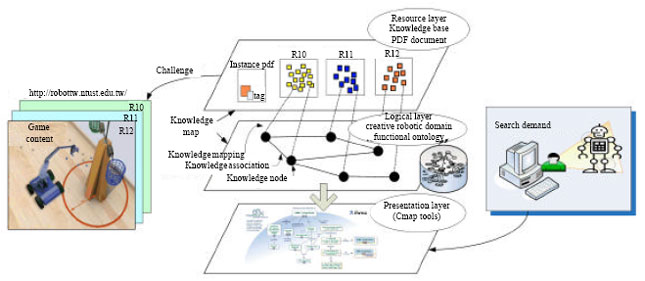 | |
| Fig. 1: | Research structure |
Sun and Ding (2010) proposed the Feature Command Ontology Model (FCOM) which includes a number of Neutral Semantic Feature Commands (NSFCs) corresponding to the basic modeling operations of CAD systems. The FCOM which has explicit ontological semantics, provides the uniform representation of heterogeneous information and helps to shield the heterogeneity of data sources.
In the problem of design and manufacturing, functional knowledge represents designer’s intention. It plays a crucial role in engineering tasks such as designing and trouble shooting by engineers as well as understanding artifacts by users. In this study, we proposed functional knowledge ontology which can enable designers to better understand the design requirements and carry out effective reasoning in the functional space. That is, our goal firstly is to establish a functional ontology. The functional ontology enables us to realize a functional understanding system which identifies functional structures of an artifact.
In addition, concept maps are collections of propositions which can be seen as simplified natural language sentences, displayed as a two-dimensional network of labeled nodes and links (Erduran-Avci et al., 2009). In this study, we propose a new approach that combines function model and concept map to establish an ontology-based model for functional knowledge.
Further, the annual Taiwan Robot Game Contest started from 1997 is to cultivate the interests among university and/or college students for creation and bring out the potential in them for innovation. Competing robots would get awards if the designs can demonstrate their outstanding mobility, agility and control ability to overcome obstacles, such as avert light beams, simulated huge stones, deep cliff and barriers, to reach out the destinations by four minutes. After the annual game, all winners are requested to submit their abstract papers to the RobotTW Portal (http://robotTW.ntust.edu.tw).
As for applied example of contest robot design knowledge, in order to share the functional knowledge model anywhere on the Internet, we use CmapTools which allow users to construct, navigate, share and criticize knowledge models represented as concept to implement that. It shows some benefits from functional ontology-based applications in engineering knowledge management domain.
FUNCTIONAL ONTOLOGY
The definition of ontology: Ontology means the subject of existence in philosophy. In the context of knowledge sharing, ontology means an explicit specification of a conceptualization (Maedche, 2001). Ontology is a basic component for employing semantic web technology in knowledge management systems. An ontology as a graph or network structure consists of a set of concepts, relationships connecting concepts and instances assigned to a particular concept. Sometimes “classes” and “concepts” are used to represent the same in ontology. Ontology can be created using RDF (Resource Description Framework) and OWL (Web Ontology Languages) recommended by W3C consortium (Hayes et al., 2005).
In recent years, the ontology research about field knowledge gradually has been paid more attention in many ways. “CIDOC National Digital Storage Program”, “Gene Ontology” and “seafood and grape wine ontology” are the famous stories. However, engineering application of ontology has not yet been provoked, especially for knowledge sharing of design and manufacturing.
The functional ontology: Understanding an artifact is a major part of engineering domain knowledge. Functionality is one of the key concepts in understanding an artifact. While there is no common understanding of what a function is, people share the idea would be tightly related to design intention. In contrast to objective data about an artifact such as dimension, shape and structure, recognition of functionality is dependent on systems, environments or situations in which they are embedded. A function of a device explains what users can get using it in an environment. A function of a component embedded in a system explains why the component exists in the system and how it contributes to achieving the system’s whole-function. In the problem of design and manufacturing, functional knowledge represents designer’s intention. It plays a crucial role in engineering tasks such as designing and trouble shooting by engineers as well as understanding artifacts by users (Kitamura et al., 2004).
Functional analysis is a means to provide the link between the systems architect concept and the engineers’ design. It helps the engineers to develop a complete design solution by providing a systematic means of identifying all of the functional elements that need to be incorporated in the system. And then, it provides an integrated view of the design to help the engineers understand and manage the system under development as an integrated whole. Besides, the purposes of the function model are to describe the functions and processes, assist with discovery of information needs, help identify opportunities and establish a basis for determining product and service costs (Kitamura et al., 2006).
The development steps specifically for our functional ontology can be summarized as follows (Noy and McGuiness, 2001):
| • | Determine the domain and scope of the ontology: The domain and scope are restricted to the creative robot contest. The submitted technical reports are used as the knowledge instances of the robot ontology. We sketched a list of competency questions as follows to verify our knowledge base capabilities. |
| • | What required parts make an integrated robot workable? What is the core value of each part? | |
| • | For a specific robot team which mechanism is used to carry out a specific action? | |
| • | What kind of different mechanisms can fulfill fully the requirements of movement and capture operations in the same time? | |
| • | If the target object changed to different shapes, a specific capture mechanism designed for the past game theme still is in effect to complete its job? | |
| • | Is there unusual concept which fulfills some well-known actions? |
| • | Enumerate important terms in the ontology: Currently a list of all contest and robot terms is defined in Chinese and its English names. There are really important to make problem-solving statements express in a consistent way. It also provides the reference base to answer the following questions: What properties do those terms have? What would we like to say about those terms? |
| • | Define the classes and the class hierarchy: The Classification of robot ontology is developed with the combination method of top-down and bottom-up approach. As stated in "Ontology Development 101", developing the class hierarchy and defining properties of concepts (slots) are closely intertwined. It is hard to do one of them first and then do the other. Therefore, we tried to present few definitions of the major concepts in the hierarchy first and then continue by describing their properties and so on. The functional ontology of contest robot contains four main classes: “Requirement”, “Function”, “Structure” and “Triz Principle” (Fig. 2). |
| • | Define the properties of classes-slots: Slots are defined by relationships of parts within and between other individual with intrinsic properties or extrinsic properties. The facets of the slots are also needed to define their slot cardinality and the slot-value types. |
| • | Create instances: Instances can be created their relationships based on slots (Fig. 3). |
REPRESENTING ONTOLOGIES AS CMAPTOOLS
Concept maps are a intuitive visual knowledge representation technique. They appear to have more "computational efficiency" than some other forms of knowledge presentation such as pure text or predicate logic. Concept maps are graphs consisting of nodes and arcs, representing relationships between nodes. The nodes are labeled with descriptive text, representing the “concept” and the arcs are labeled with the relationship type (Hayes and Eskridge, 2005).
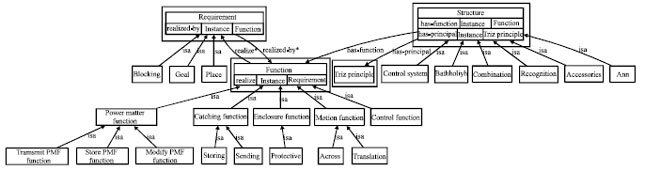 | |
| Fig. 2: | An upper ontology of function for Contest Robot (generated by Protégé software) |
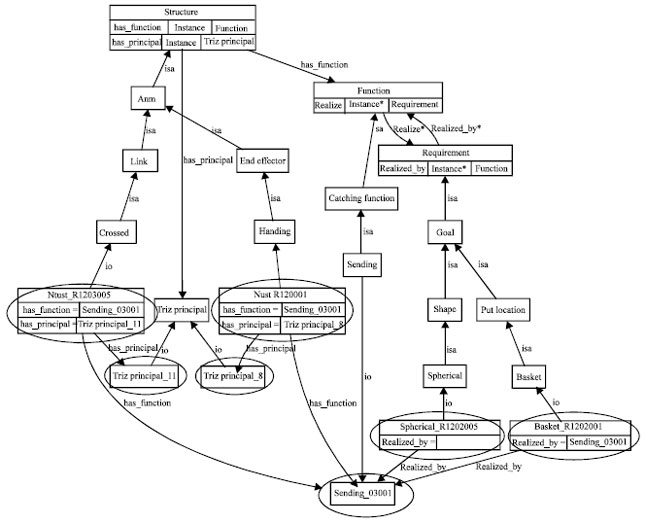 | |
| Fig. 3: | Instance implementation (generated by Protégé software) |
Concept maps are “informal” representations that facilitate knowledge capture for human examination and sharing. CmapTools allows users to build knowledge models consisting of sets of interconnected concept maps annotated with material such as text documents, diagrams and video clips. It provides rich, searchable, browsable knowledge models available for navigation and collaboration across geographically-distant sites. It supports both synchronous and asynchronous methods for collaborative map development.
COE (CMapTools Ontology Editor) is comprised of a set of Java modules that extend CmapTools with features that are particularly oriented towards the expression of formalized ontologies while retaining and extending the human-oriented advantages of the concept map interface (Novak and Canas, 2004).
 | |
| Fig. 4: | Using COE to create Concept Map |
 | |
| Fig. 5: | Portion of a knowledge model developed by cmaptools for contest robot |
The purpose is to give domain experts the ability to construct, share and examine Web ontologies. The system supports importing, editing and storing of OWL Ontologies in the form of concept maps, exporting concept maps to OWL/XML files, searching for concepts and properties in existing concept maps and Web ontologies and examining the different roles which concepts play in other ontologies which gives composers the ability to choose appropriate concepts for their ontologies (Leake et al., 2004).
To bridge the gap between the informal nature of concept maps and the formal, machine-readable Web ontology languages, COE uses a set of conventions and guidelines that enables users to construct syntactically valid Web ontologies using the concept-mapping interface. These conventions retain as far as possible an intuitive reading of the concept map while faithfully capturing the precision of the OWL syntax and are based on a few basic ideas. English words and phrases are used as far as possible and it avoids the ‘mathematical logic’ terminology that pervades the OWL documentation. These conventions retain as far as possible an intuitive reading of the concept map while faithfully capturing the precision of the OWL syntax and are based on a few basic ideas. For example, the fact that motor are driving element would be represented in OWL-XML syntax by saying that Motor is a ‘subclass’ of Driving Element; in COE, as shown in Fig. 4, it is rendered using a link labeled ‘are’ from the subject to the object of the sentence, mirroring the syntax of a simple English sentence and avoiding the use of the ‘subclass’ terminology.
Users can construct ontologies by direct manipulation of the CmapTools interface but for several of the OWL constructs, this requires a number of steps to make the appropriate linkages and set the box and line styles according to convention.
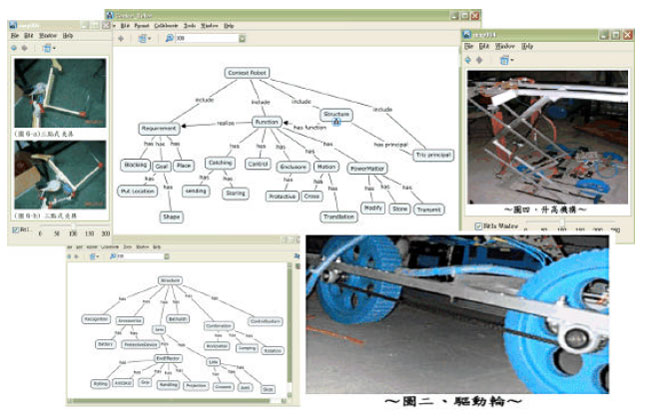
Figure 5 shows several opened windows, the result of navigating through our model based on functional perspective. By clicking the “concept map” icon underneath a concept, a list of available Cmaps is displayed which the user can select and open. It can be shared the functional knowledge model anywhere on the Internet.
CONCLUSIONS
In this study, we have developed a knowledge map navigation which is based on functional ontology and concept maps. A functional ontology model is presented to show up the relationships among diverse technical documents. Besides, present implementation of document model would be demonstrated by CmapTools which allow the users to export ontologies in OWL format.
Further, as for applied example of contest robot, it says some benefits from our proposed model in engineering knowledge management domain.
ACKNOWLEDGMENT
The authors would like to thank the National Science Council for its financial support.
REFERENCES
- Kitamura, Y., M. Kashiwase, M. Fuse and R. Mizoguchi, 2004. Deployment of an ontological framework of functional design knowledge. Adv. Eng. Infor., 18: 115-127.
CrossRefDirect Link - Kitamura, Y., N. Washio, Y. Koji, M. Sasajima, S. Takafuji and R. Mizoguchi, 2006. An ontology-based annotation framework for representing the functionality of engineering devices. Proc. ASME, 4a: 125-134.
CrossRefDirect Link - Hayes, P., T.C. Eskridge, R. Saavedra, T. Reichherzer, M. Mehrotra and D. Bobrovnikoff, 2005. Collaborative knowledge capture in ontologies. Proceedings of the 3rd International Conference on Knowledge Capture, (KC'05), USA., pp: 99-106.
CrossRefDirect Link - Chen, C.P., P.L. Liu and C.H. Tsai, 2008. A study of the influence of organizational knowledge ability and knowledge absorptive capacity on organization performance in Taiwan's hi-tech enterprises. J. Applied Sci., 8: 1138-1148.
CrossRefDirect Link - Binwahlan, M.S., N. Salim and L. Suanmali, 2009. Intelligent model for automatic text summarization. Inform. Technol. J., 8: 1249-1255.
CrossRefDirect Link - Zhu, Z., Y. Chen, R. Lan and Z. Li, 2009. Study of MDA based semantic web service composition. Inform. Technol. J., 8: 903-909.
CrossRefDirect Link - Yanqing, W., C. Deyun, S. Chaoxia and W. Peidong, 2010. Vision-based road detection by monte carlo method. Inform. Technol. J., 9: 481-487.
CrossRefDirect Link - Chung, Y.C., Y.W. Hsu, C.H. Tsai and S.C. Tsai, 2010. Relationship between organizational cultures, information technology involvement, degrees of knowledge management implementations and performance of new product developments. Inform. Technol. J., 9: 1504-1516.
CrossRefDirect Link - Li, G. and H. Lu, 2010. Visual knowledge recommendation service based on intelligent topic map. Inform. Technol. J., 9: 1158-1164.
CrossRefDirect Link - Wei, S., M. Qin-Yi and G. Tian-Yi, 2009. An ontology-based manufacturing design system. Inform. Technol. J., 8: 643-656.
CrossRefDirect Link - Sun, L. and B. Ding, 2010. Ontology-based semantic interoperability among heterogeneous CAD systems. Inform. Technol. J., 9: 1635-1640.
CrossRefDirect Link - Erduran-Avci, D., P. Unlu and R. Yagbasan, 2009. Using concept maps as a method of assessment in work-energy subject. J. Applied Sci., 9: 427-437.
CrossRefDirect Link