
S.B. Ayati
School of Mechanical and Automotive Engineering, Faculty of Engineering, Kingston University, London, UK
A. Ordys
School of Mechanical and Automotive Engineering, Faculty of Engineering, Kingston University, London, UK
G. Collier
School of Mechanical and Automotive Engineering, Faculty of Engineering, Kingston University, London, UK
D.S. Laila
School of Mechanical and Automotive Engineering, Faculty of Engineering, Kingston University, London, UK
International Journal of Manufacturing Systems
Year: 2011 | Volume: 1 | Issue: 1 | Page No.: 46-56







ABSTRACT
A new vehicle prior to being released has to undergo an extensive program of tests such as emission, safety and durability. Recently, some robots and electronic devices are dedicated to perform such tests instead of human drivers. In this study, control of the vehicle under durability and emission test circumstances is simulated using LabVIEW which can easily be connected to hardware for the purpose of real-time testing in the drive-by-wire-system. A longitudinal model of the vehicle is modeled with the brake and the throttle as inputs and the velocity, the position and the main components of exhaust gas as outputs. To control the vehicle a nonlinear fuzzy controller is designed and applied and the position of the vehicle is interrogated. The kinematics of the vehicle is included in the model to transform the velocity to the Cartesian position of the vehicle.
PDF Abstract XML References Citation
Received: February 25, 2011;
Accepted: April 12, 2011;
Published: June 07, 2011
How to cite this article
S.B. Ayati, A. Ordys, G. Collier and D.S. Laila, 2011. Control Algorithm for Driving Test Simulation. International Journal of Manufacturing Systems, 1: 46-56.
DOI: 10.3923/ijmsaj.2011.46.56
URL: https://scialert.net/abstract/?doi=ijmsaj.2011.46.56
DOI: 10.3923/ijmsaj.2011.46.56
URL: https://scialert.net/abstract/?doi=ijmsaj.2011.46.56
INTRODUCTION
In the automotive industry, prior to a new vehicle being released, it has to undergo an extensive program of tests. These include emission, safety and durability tests. As an example, in the emission tests, the vehicle engine can be put on a dynamometer and the tests are then performed by simulating a set of driving conditions in terms of vehicle velocity (Bauer, 1996). Recently, the use of dedicated robots to replace human drivers, in order to perform such tests, has become an important development. Moreover, the increasing use of ”drive-by-wire” systems means that such tests can be performed by means of generating appropriate input signals to the engine control system, instead of to the robot actuators.
This research investigates the automation of the durability and emission tests. In durability tests, the vehicle has to be driven on the road for a long time to check how different components withstand mechanical movements caused, for instance, by changing road surfaces. Very often automotive companies have dedicated tracks on which such tests are carried-out. The same car is driven continuously for many days while the drivers are changed from time to time. The objective of this study is to design a system which will eliminate the need for human drivers in such tests.
The simulation of the vehicle under the mentioned test circumstances is presented. As the first step, a simulation model of a vehicle has been developed. In the next step, a control algorithm will be designed, allowing for automated (autonomous) driving on a fixed test track. These will be tested on the simulation model first, before being implemented on the real vehicle. A simulation model of the vehicle with throttle, brake and angular velocity of the steering wheel as inputs is developed.
The models have been implemented in LabVIEW. They will interact with the virtual driving environment that includes information about the topology of the test-track. A suitable control algorithm will then determine inputs to the vehicle model to accurately track the pre-defined trajectories in terms of vehicle speed and the desirable path of travel. A simulation system is being built in LabVIEW which can easily be connected to hardware for the purpose of real-time testing in the drive-by-wire-system.
Development and simulation of a vehicle model under emission test circumstances, without concerning of the position has been done by Ayati et al. (2009). In this study, the vehicle position is considered and in order to control the vehicle position the kinematic of the vehicle is included in the model. This will accommodate the requirement for the durability test which is one of the main objectives of this study.
TEST PROCEDURES
Durability test: Durability is the ability of an object to perform its function repeatedly, over a long period. In vehicle terms, performance is the length of time that the vehicle would last to travel. For long time, durability test has been considered at the last part of the vehicle development program. Lack of success at the end of manufacture makes the whole production line failed and costs lots of money. For this reason, automobile manufacturers try to change the stage of these tests (Mira). The durability tests are executed in two groups. The first includes standard driving test (Wang et al., 2003) i.e.,
| • | Tests for steering input, steering effort, lane changes, steady-state cornering and other related vehicle dynamics, normally involving short distance on good condition roads |
| • | Vehicle durability tests on special roads and surfaces, normally involving long distance on poor-condition roads |
| • | Traction-control tests to evaluate and optimise the tyre and suspension performance over a range of conditions |
The second includes special driving tests, i.e.,
| • | An accelerated vehicle corrosion test which occurs mainly in special chamber |
| • | Low-friction tests for antilock braking systems |
The test facility comprises several lanes, as shown in Fig. 1. To mention some of these facilities are for instance (Shoval et al., 1998):
| • | Belgian black lane (Pave) which consists of several surface patterns and diagonal trenches |
| • | Truck lane which consists of three events, i.e. staggered holes 100 mm bumps and special bumps for body frame twist, to represent aggressive loads |
| • | Smooth lane which consists of asphalt surface for fast driving |
Emission test: In order to evaluate a vehicle before it is released to the market and to ensure the safety and the level of pollutants, the manufacturers execute some emission tests. During these tests the vehicle tracks a defined trajectory in terms of vehicle velocity and the exhaust emissions are measured.
 | |
| Fig. 1: | A bird’s eye view of a proving ground (Mira) |
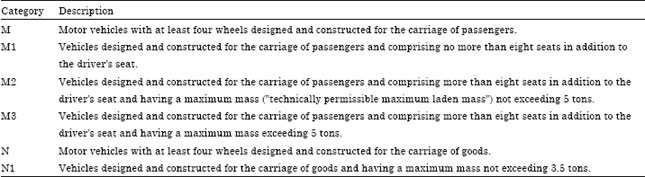
| Table 1: | Vehicle categories (Dieselnet) |
 | |
| Table 2: | The EU emission standards (Dieselnet) |
 | |
In this study we use the Extra Urban Driving Cycle (EUDC) which is used in EU countries. Then the results of the emission measurement are compared with the emission standards which are defined by legislations.
Performing emission tests requires legislations to classify vehicles into several categories; some of them are listed in Table 1. Legislations have specified the emission standard limitations for each category individually. The emission standards for passenger cars and light commercial vehicles introduced by the European Union legislation are summarised in Table 2. Exhaust pollutants include hydrocarbon (HC), Nitrogen oxides (NOx), carbon monoxide (CO) and carbon dioxide (CO2) (Bauer, 1996; US Environmental Protection Agency Office of Mobile Source (EPA), 2007).
This study considers a combination of durability and emission tests. The vehicle is simulated in a gyrate lane shown in Fig. 2 under the EUDC and its parameters are specified in Table 3.
 | |
| Fig. 2: | Steering pad (Mira) |
| Table 3: | EUDC parameters (Dieselnet) |
 | |
MODELING THE VEHICLE
In order to simulate the vehicle under mentioned test, the vehicle model contains brake, throttle and the angular velocity of the steering wheel as the inputs and the vehicle velocity, pollutants and position as outputs.
Emission tests are normally performed on a straight line and therefore the longitudinal model of the vehicle is appropriate to use. However, in this study the test is a combination of durability and emission test the vehicle model is equipped with kinematic model to obtain the vehicle position as an output using LabVIEW (Ayati et al., 2009).
Power train and dynamic: The dynamic model of the powertrain has been derived from the Newton’s second law of motion using the standard equation from (Ayati et al., 2009; Kiencke et al., 2005; Matlab, Using simulink). This powertrain models the power transmission started from the engine and passed through the torque convertor, the transmission, the driveshaft and at the final drive to the wheels.
The engine input is the throttle opening as directed by the driver. The appropriate engine torque is selected from the engine map (look up table) which depends on the throttle opening and the current engine speed (Ayati et al., 2009; Chaing et al., 2007).
The vehicle dynamics include the longitudinal forces acting on the vehicle, namely the aerodynamic drag, Fa, the rolling resistance, Fr and the gravitational forces, Fg (Ayati et al., 2009; Ori et al., 2011):
| (1) |
| (2) |
| (3) |
The engine model is represented by the following equations, consisting of the engine speed, Ne and the engine torque, Te:
| (4) |
| (5) |
The transmission model is expressed as a static gear ratio:
 | (6) |
 | (7) |
| (8) |
The final drive is represented as:
| (9) |
Exhaust emissions: The vehicle model contains an exhaust emissions part to measure the pollutants during the test. This model measures CO, CO2, O2, HC and NOx under standard test cycles. CO, CO2 and O2 are measured in volume percent and HC and NOx are measured in parts per million of carbon (Ayati et al., 2009; Saidur et al., 2008).
Kinematic model: The kinematic model of the vehicle is constructed by employing the nonholonomic constraints. If in a system the velocity restrictions do not cause position restriction, this system is nonholonomically constrained. This model assumes that there is no wheel slippage. The relations have been derived from the constraints in Fig. 3 (Mellodge, 2002; Moret, 2003):
 | |
| Fig. 3: | The Cartesian position of the vehicle (Mellodge, 2002) |
| (10) |
| (11) |
| (12) |
| (13) |
where, v1 is the forward vehicle velocity and v2 is the angular velocity of the steering wheel, (x, y) is the Cartesian position of the centre of mass of the vehicle, φ is the angle of the front wheel and θ is the orientation of the vehicle.
The use of this kinematic model is in particular to transform the forward velocity to obtain the Cartesian position of the vehicle, as the position information is needed to perform the durability test of the vehicle. Note that in this model the orientation angle of the front wheel depends only on the angular velocity of the steering wheel, hence an external steering action can be used to implement v2 as will be used in the simulation in this study (Cao et al., 2006).
FUZZY CONTROL
Fuzzy control is a method based on a set of linguistic rules. It is a practical option for different control application since it makes controlling the nonlinear system more convenient by using the heuristic information (Possino and YurkoVich, 1998). Designing a fuzzy controller consists of three processes: Fuzzification, Fuzzy Rules, Defuzzification (Ayati et al., 2009; Ali, 2011).
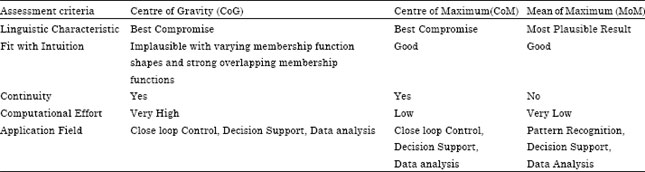
Variables and numeric inputs are converted to fuzzy sets by membership functions in the Fuzzification step. Then defining the rules between inputs and outputs generates the relations to produce output in Fuzzy Rules step. IF-THEN Rules are common relations to introduce the control strategy (Ayati et al., 2009; Zetterqvist, 2007). Finally, Defuzzification converts fuzzy sets to the numerical and output variables and sends them to the system under control. The most common method of Defuzzification applied to closed-loop control applications is the Centre of Gravity (CoG). In Table 4, the comparison of different defuzzification methods is shown. The controller inputs are the speed error and the speed error change. Two fuzzy controllers are applied individually for the brake and throttle control. The fuzzy control rules each for the brake and for the throttle are listed in Table 5 (Ayati et al., 2009).
| Table 4: | Comparison of Various Defuzzification Methods (National Instruments 2007) |
 | |
| Table 5: | The brake and throttle Fuzzy rules |
 | |
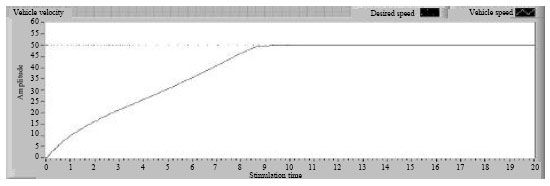 | |
| Fig. 4: | Step response of the model with Fuzzy controller |
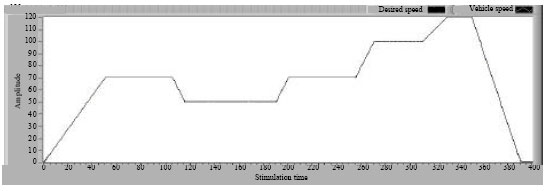 | |
| Fig. 5: | EUDC response of the vehicle |
RESULTS
The step response of the model which has been controlled with the fuzzy controller is shown in Fig. 4.
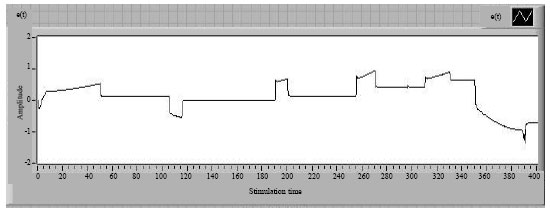 | |
| Fig. 6: | Vehicle velocity error for EUDC test cycle controlled by fuzzy controller |
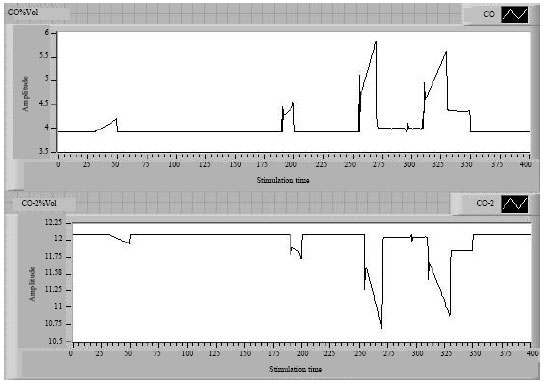 | |
| Fig. 7: | Measurements of CO and CO2 under EUDC cycle when applying Fuzzy controller |
First of all, the results of applying the EUDC cycle are illustrated in Fig. 5 in terms of vehicle velocity in 400 sec and the velocity error to track the desired velocity is shown in Fig. 6.
During the test under EUDC cycle, the particular pollutants are being measured. The results of CO and CO2 measurements are shown in Fig. 7 (in volume percent) and HC and Nox measurements in Fig. 8 (in parts per million of carbon) for the vehicle with fuzzy controller.
Figure 9 shows the position of the vehicle under EUDC velocity controlled to track the gyrate path with radius of 600 m.
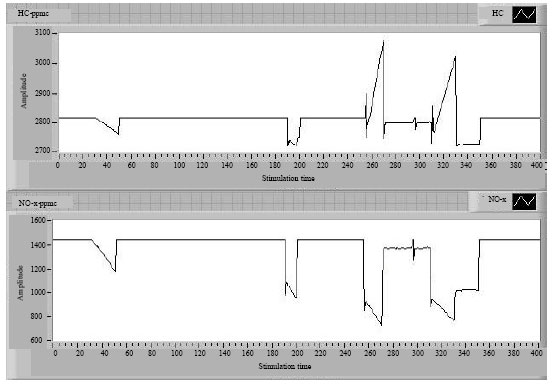 | |
| Fig. 8: | Measurements of HC and NOx under EUDC cycle when applying Fuzzy controller |
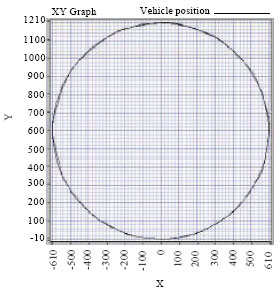 | |
| Fig. 9: | The vehicle cartesian position |
CONCLUSION
The combination of the emission and durability tests has been studied. The vehicle has been simulated under EU emission standards cycle named EUDC in terms of vehicle velocity on the gyrate path specific for durability tests. A model of a passenger car with the brake, the throttle and the angular velocity of the steering wheel as inputs and the vehicle velocity, the vehicle Cartesian position and the measured pollutants as outputs has been developed using LabVIEW, as a simulation module.
Two fuzzy controllers, for the brake and the throttle, respectively, have been developed and implemented to control the brake and throttle individually to track the desired speed. Exhaust emissions have been measured during the test. The vehicle has been passed through the gyrate path twice by having the EUDC cycle speed in 400 sec. The vehicle tracks the EU cycle very well and fast by the performance of Fuzzy controller. The error figure shows the high precision of the proposed controller. The levels of measured pollutants are nearly constant, except when the engine has been demanded for aggressive action.
The embedded kinematic makes it possible to measure the Cartesian position of the vehicle and also to steer the vehicle. A simple open loop steering, to follow a circular path has been shown. As this study is only a preliminary study for the emission and especially the durability tests, as the further study, we will use the model and design a control algorithm for automatic driving for durability tests purposes. While in this study an open loop steering is considered, a feedback steering will be required to allow the vehicle to stay on track on a proving ground which has more complicated shape than only a circular path.
REFERENCES
- Ali, H.K., 2011. Fuzzy controller design of servo system. Asian J. Applied Sci., 4: 403-413.
CrossRef - Cao, J.I., B.G. Cao and Z. Liu, 2006. Driving resistance estimation based on unknown input observer. J. Applied Sci., 6: 888-891.
CrossRefDirect Link - Chaing, W.P., L. Zhu and R. Patankar, 2007. Mean value engine modeling and validation for a 4-stroke, single cylinder gasoline engine. Trends Applied Sci. Res., 2: 124-131.
CrossRefDirect Link - Saidur, R., M.I. Jahirul, M. Hasanuzzaman and H.H. Masjuki, 2008. Analysis of exhaust emissions of natural gas engine by using response surface methodology. J. Applied Sci., 8: 3328-3339.
CrossRefDirect Link - Shoval, S., J.P. Zyburt and D.W. Grimaudo, 1998. Robot Driver for guidance of Automatic Durability Road (ADR) tests vehicles. Proceedings of the IEEE International Conference on Robotics and Automation, May 16-20, Leuven, Belguim, pp: 1767-1772.
CrossRefDirect Link - Ori, T.R., P. Gbaha, J.T. Balou Bi and O. Asseu, 2011. Simulation of a vehicle's operation controlled by active suspensions. Asian J. Scientific Res., 4: 139-148.
CrossRefDirect Link - Wang, F.Y., X. Wang, L. Li and P. Michandanl, 2003. Creating a digital-vehicle proving ground. IEEE Intell. Syst., 18: 12-15.
CrossRefDirect Link