
T. Nagarajan
Department of Mechanical Engineering, Universiti Teknologi PETRONAS Bandar Seri Iskandar, 31750 Tronoh, Perak, Malaysia
S. Krishnan
Department of Mechanical Engineering, Universiti Teknologi PETRONAS Bandar Seri Iskandar, 31750 Tronoh, Perak, Malaysia
Victor Amirtham
Department of Mechanical Engineering, Universiti Teknologi PETRONAS Bandar Seri Iskandar, 31750 Tronoh, Perak, Malaysia
Ahmad Majdi Abdul-Raniand
Department of Mechanical Engineering, Universiti Teknologi PETRONAS Bandar Seri Iskandar, 31750 Tronoh, Perak, Malaysia
T.V.V.L.N. Rao
Department of Mechanical Engineering, Universiti Teknologi PETRONAS Bandar Seri Iskandar, 31750 Tronoh, Perak, Malaysia
Asian Journal of Scientific Research
Year: 2013 | Volume: 6 | Issue: 3 | Page No.: 596-602







ABSTRACT
Pneumatic Artificial Muscle (PAM) as an actuator to create pulling force and bulges mimicking a human muscle contraction. Currently, the method used to manufacture the PAMs is by braiding with artificial fibers. Natural fiber braided PAMs are rarely available for the usage in prosthesis. The novel contribution of this project is to design and develop a desirable low cost and lightweight Pneumatic Artificial Muscle (PAM) actuator using different materials. In this study, the studies are conducted to find the effect of various braided materials such as nylon and Natural Fiber (Silk). The analysis is carried out on actuators of having constant longitudinal length of 140 mm varying the diameter namely 20 and 30 mm. The experiment was set up to collect the length and force variation data of the artificial muscle with various compressed air pressures. The force generated by PAM purely depends on the rate of pressure added and removal from the actuator and is contractile in nature upon inflation. PAM actuator find wide applications in various facets of robotic equipments and industrial automation.
PDF Abstract XML References Citation
Received: October 05, 2012;
Accepted: November 02, 2012;
Published: January 15, 2013
How to cite this article
T. Nagarajan, S. Krishnan, Victor Amirtham, Ahmad Majdi Abdul-Raniand and T.V.V.L.N. Rao, 2013. Experimental Investigation-Natural Fiber Braided Sleeve for Pneumatic Artificial Muscles Actuation. Asian Journal of Scientific Research, 6: 596-602.
DOI: 10.3923/ajsr.2013.596.602
URL: https://scialert.net/abstract/?doi=ajsr.2013.596.602
DOI: 10.3923/ajsr.2013.596.602
URL: https://scialert.net/abstract/?doi=ajsr.2013.596.602
INTRODUCTION
A Pneumatic Artificial Muscle (PAM) is currently becoming very popular because of its availability to convert pneumatic power to a pulling force. Apart from low weight this actuator produces high force to weight ratio, minimal compressed air consumption and extreme safe for human use (Wickramatunge and Leephakpreeda, 2009). The PAM was first invented in 1950s by the physician, Joseph L. McKibben and the PAM was used as a artificial limb for handicapped hands (Tondu and Lopez, 2000).
In 1980s, more powerful PAM was introduced by Bridgestone Company and it was used for painting applications, some application to assist disabled individuals and service robotics (Daerden and Lefeber, 2002). PAM actuators find wide applications in various facets of robotic equipments and industrial automation. This work investigate the application of Natural Fiber (Silk) as a braided Sleeving with internal core as a silicon rubber tube. This muscle contains silicon rubber tube which will expand in radially when inflated, while surrounded by silk netting to prevent in to explode.
 | |
| Fig. 1(a-b): | Basic operation of a pneumatic artificial muscle (PAM) with (a) Relaxed (initial) and (b) Contracted (final) condition |
Basically, the PAM actuator is made of thin rubber tube (Silicon, Latex) covered by a braided mesh shell (Nylon) and the two ends were closed, one being inlet pressure and the other connected with the load. When the PAM is supplied with the supply air pressure at the inlet port, the internal bladder tends to increase its volume against the braided mesh shell causing the actuator to shorten in its length and produces pulling forces (Wickramatunge and Leephakpreeda, 2009). This basic operation is shown in Fig. 1.
Change of diameter occurs when the D0 is the initial condition upon application of pressure the diameter of the PAMs increases into D1 and initial length L0 reduces to L1. With this condition a basic Pneumatic Artificial Muscle (PAMs) works.
COMPARISON OF ACTUATORS
An actuator is a mechanical device that converts different types of energy to mechanical form, generating force, torque or motion (Krishna et al., 2011). The basic commonly used actuation is pneumatics cylinder, hydraulic cylinder and electric motors (Laksanacharoen, 2004). Pneumatics cylinder is another form of actuation which is typically of low cost and has quick response times, but has control issue and is commonly noisy (Tondu and Lopez, 2000). In comparison with pneumatics cylinder, pneumatic muscle actuators have been cited as capable of producing almost three times the force of pneumatic cylinder actuator with the same volume, operating at equivalent pressures (Lynn, 2000).
Over the years the continued development of pneumatic drives has moved from the utilization of individual components to the implementation of complex automation system (Deaconescu, 2007). New system were developed adding mechanical and electronic elements, as well as sensor to the classical pneumatic construction. Figure 2 presents the evolution in time of constructive solutions for pneumatic Automation (Deaconescu, 2007). Pneumatics Muscles represent a good alternative to pneumatics cylinder used in various industrial applications.
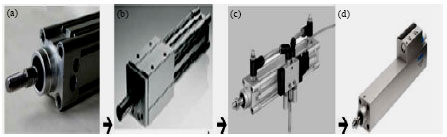 | |
| Fig. 2(a-d): | Constructive variants pneumatic drives, (a) Pneumatic, (b) Pneumatic+mechanical, (c) Pneumatic+electronic and (d) Pneumatic+sensors (Deaconescu, 2007) |
 | |
| Fig. 3: | Forces developed by a 10 mm pneumatic artificial muscle and a pneumatic cylinder (Caldwell et al., 1995) |
Figure 3 illustrates a comparison of the forces generated by a pneumatics muscle of 10 mm nominal diameter and the force developed by a pneumatics cylinder of the same diameter (Deaconescu and Deaconescu, 2008). It is observed that a pneumatic muscle develops significantly higher force than a pneumatic cylinder for the same nominal diameter.
Another important form of power actuation is provided from hydraulic cylinder. These actuators are commonly used in high power system and provide high power/weight ratio due to its ability to achieve high ratings of oil pressurization (Inoue, 1988), but there are some disadvantages using hydraulic cylinder like higher cost, more maintenance requirement and safety risks associated with leaking oil than pneumatics artificial muscle.
MATERIALS AND METHODS
Figure 4 represents the artificial muscle diagram consisting of silicon rubber tube as an internal core with outer shell consisting of the silk braided sleeve. The assembly of the artificial muscle is fabricated with one end exposed to the air inlet and the other end kept closed. The selected material of PAM is ‘Silicon Rubber’. In this study diameters of 20 and 30 mm were used for fabricating the PAM. In all three PAMs, the nominal length was kept constant as 140 mm. The PAM is tested with the input pressure namely 1, 2 and 3 bars. In this study, investigation was carried out for a PAM with silicon as inner tube being braided separately with silk and nylon fibers. The selected braided material for PAM is ‘Silk’ whose properties are displayed in Table 1. These properties are compared with those of steel and nylon.
It is observed that, the value of the stiffness parameter increases while the stretch length of the natural fiber (silk) is increased in UTM machine. According to Table 1, the stiffness of the silk is 54300 N m-1 which is higher than that of steel and nylon.
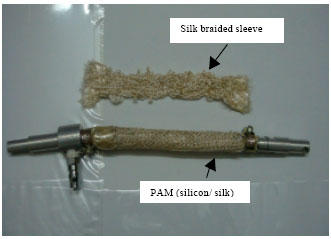 | |
| Fig. 4: | Pneumatics muscle and silk braided sleeve (Krishna et al., 2011) |
| Table 1: | The properties of silk, steel and nylon braided sleeve |
 | |
A diagram of the experimental setup depicted in Fig. 5 is capable of collecting various data like the force generated and the linear displacement of the PAM under various input pressure (Krishna et al., 2011). The top platen moves in the vertical direction along the height of the column. This enables the clear height between the top and the bottom platen to allow PAMs to be tested. Once the desires achieved, the top and bottom nuts are tightened to anchor the platen to the supporting column. The fixtures for the pinned-end fixed end condition are attached to the platen through a hole at the centre of the platen and held in position by a nut at the top of the platen. The load is applied to the specimen by means of a manual screw jack. A load cell (K09132) is fixed between the screw jack and the fixture for the end conditions to measure the pulling force of the PAMs. The output from the Load cell is indicated on the digital indicator (Rinstrum R320) coupled with the load cell.
RESULTS AND DISCUSSION
Figure 6 shows the force versus pressure of the 20 and 30 mm diameter artificial Muscle. The compressed air pressures of 1, 2 and 3 bars were used for testing actuator, where the initial pre-tension force of 10 N had been set. The experiment was performed by increasing the pressure at the inlet of the PAMs and the force produced by the muscle was recorded from force display meter shown in Fig. 5. It is observed that 30 mm diameter muscle produced maximum force of 113 N at 3 bar while 20 mm muscle could produced only 85 N . The result show that the larger diameter muscle produced higher force than smaller diameter one.
 | |
| Fig. 5: | Photograph of experimental apparatus (Krishna et al., 2011) |
 | |
| Fig. 6: | Force vs. pressure between 20 and 30 mm Silk braided sleeve with silicon as internal tube |
Figure 7 shows the force produced by various diameter PAMs with nylon braided sleeves with internal tube being silicon. It can observed that 30 mm diameter PAM produced the maximum force of 279 N at a pressure of 3 bar followed by 209 N for 20 mm diameter PAMs.
According to the Fig. 8, nylon braided sleeve actuator produces higher force 279 N with 3 bar inlet pressure while the silk braided PAM produces only 113 N at the same inlet pressure of 3 bars.
 | |
| Fig. 7: | Force vs. pressure between 20 and 30 mm nylon braided sleeve with silicon as internal tube |
 | |
| Fig. 8: | Force vs. pressure between 30 mm nylon and silk braided sleeves with silicon as internal core |
This is due to fact that the silk strand is having a higher stiffness of 54300 N m-1 when compared with the nylon with stiffness of 24900 N m-1.
CONCLUSION
The novel contribution of this paper is the application of natural fiber (Silk) as a braided sleeve for the PAM. The silk braided PAMs were fabricated with hand woven silk sleeves. A simple artificial muscle with internal core of silicon rubber netted by natural fiber (Silk) was fabricated. The low cost natural fiber (Silk) was used as a braided sleeve as opposed to expensive nylon or steel braided sleeve for the PAM. The force produced by the silk is compared with nylon braided actuator. Even through nylon gives higher force than silk braided sleeve, the latter is preferred since it is more compatible for bio-medical applications. This Silk braided actuator is a possible alternative to be implemented in bio medical application because of its soft motion, inexpensive and biodegradable. It is expected that these silk braided PAM will show significant improvement in its behavior if alternatives were made is fabricate the sleeves with automatic sleeve winding machines.
ACKNOWLEDGMENT
The authors wish to thank the Universiti Teknologi PETRONAS (UTP) for the facilities to conduct is research.
REFERENCES
- Tondu, B. and Lopez, 2000. Modeling and control of mckibben artificial muscle robot actuator. IEEE Control Syst. Mag., 20: 15-38.
Direct Link - Daerden, F. and D. Lefeber, 2002. Pneumatics artificial muscle: Actuators for robotics and automation. Eur. J. Mech. Environ Engin., 47: 90-102.
Direct Link - Krishna, S., T. Nagarajan and A.M.A. Rani, 2011. Review of current development of pneumatic artificial muscle. J. Applied Sci., 11: 1749-1755.
CrossRef - Deaconescu, A. and T. Deaconescu, 2008. Contribution to the behavior study of pneumatically actuated artificial muscles. Proceedings of the 6th International DAAAM Baltic Conference, April 24-26, Industrial Engineering, Tallinn, Estonia, pp: 1-5.
Direct Link - Caldwell, D.G., G.A. Medrano-Cerda and M. Goodwin, 1995. Control of pneumatic muscle actuator. IEEE Control Syst., 15: 40-48.
CrossRef