
E. Seidi
Department of Agricultural Engineering, Faculty of Agriculture, Payame Noor University, Tehran, Iran
H.R. Ghassemzadeh
Department of Agricultural Machinery Engineering, Faculty of Agriculture, University of Tabriz, Tabriz, Iran
A. Salimi
Department of Mechanical Engineering, Faculty of Engineering, Payame Noor University, Tehran, Iran
Asian Journal of Plant Sciences
Year: 2009 | Volume: 8 | Issue: 6 | Page No.: 451-454







ABSTRACT
The purpose of this study is to develop appropriate guiding system based on this method. In the proposed system there is a soil-engaging sensing arm to follow a furrow made in previous pass and firstly by driver. This system is a mechanical guidance system as an aid to manual steering. The driver would make the first pass and headland turnings. During subsequent passes the driver will be free to concentrate on engine speed, Ploughing depth, etc., whilst the self steering device maintains the tractor in correct pass relative to the previous furrow. A sensor attached to the tractor carried a pivoted furrow follower arm which projected between the front wheels of tractor and parallel to the furrow. Through a series of linkages the movement of furrow follower was transferred to an angle sensor. It produces an appropriate signal for controlling the steering wheels. The accuracy achieved was approximately 9 cm.
PDF Abstract XML References Citation
How to cite this article
E. Seidi, H.R. Ghassemzadeh and A. Salimi, 2009. A Cheap Automatic Tractor's Driver Assistant System. Asian Journal of Plant Sciences, 8: 451-454.
DOI: 10.3923/ajps.2009.451.454
URL: https://scialert.net/abstract/?doi=ajps.2009.451.454
DOI: 10.3923/ajps.2009.451.454
URL: https://scialert.net/abstract/?doi=ajps.2009.451.454
INTRODUCTION
Guidance of agricultural vehicles has received the attention of researchers for nearly 50 years. From a review of the literature, several motivations are apparent from the effort that has been expended towards the development of a guidance system, be it autonomous or partially autonomous. The need to relieve the operator of continuously making steering adjustments while maintaining the attached or towed implement at some level of acceptable performance is perhaps the most frequently cited reason for the need for a guidance system (Wilson, 2000). Research activities concerning automatic guidance of agricultural vehicles - or implements - have led to various solutions. Sensors, including mechanical ones, Global Navigation Satellite Systems (GNSS), machine vision, laser triangulation, ultrasonic and geomagnetic, generate position, attitude and direction-of-movement information to supply control algorithms. Actuators, like hydraulic valves, are used to transform guidance information into changes of position and direction. In the European Union, depending on who is funding the project, the systems range from a PC, with a frame grabber or a GNSS receiver used to guide an implement along a predefined path with speeds up to 3 m sec, to a multiprocessor bifocal road recognition system for autonomous cars driving on motorways with a speed of 130 km h-1 (Keicher and Seufert, 2000).
In mechanized agriculture applying most of technologies such as new varieties of seeds, new pesticides, modern equipment, etc. needs to use tractors in farm as power resource. Precision guidance of the tractor in the field is critical factor because it affects fuel consumption, time used for completing a specific operation and amount of chemical which are used. Tractors in each path cover a limited area bigger than width of tractor so doing subsequent passes accurately and maintaining in a straight line (which is necessary for using successive agricultural machinery) is a big challenge for tractor driver. Because he should control work of implement and concentrate on guidance of tractor in a straight line simultaneously (Tillett, 1990).
Due to long hours of working in agricultural operations and high level of stresses, tractor driver becomes tired soon and makes a little overlapping about 5% in each path. Eventually fuel and lubricants consumption would increase that cause more air pollution, likewise more applying of chemicals and more pollution of soil and underground waters and, of course, increase of time needed to complete an specific operation which causes not completing it in optimum time period and decreases yield. Beside these by using TDAS tractor's driver fatigue would be decreased and he can do his duties during the day more efficiently. Some common technology used for navigation such as GPS. DGPS, RTKDGPS are not applicable for Iranian farmers. High investment requirement and complexity of technology and small size of farms eliminate use of them. In past years many effort has been expended towards the development of a guidance system in two categories, full autonomous or partially autonomous. Studies by Kaminaka et al. (1981) have shown that steering accuracy decreases rather dramatically as extra demands are placed on the operator. Furthermore, such studies have tended to confirm the observed fact that increased field speeds require the operator to be more attentive to the driving function, often at the expense of reduced equipment performance.
In Hokkaido University, a crop row detector equipped with a one-dimensional image sensor was developed for use in crop husbandry machinery. The principle was that the crop row image was converted, in the hardware, to a one-dimensional gray scale level signal and the software estimated the offset and heading errors. The execution time was about 40 msec and the accuracy was sufficient for practical use when the camera offset was up to 0.10 m and the attitude angle not more than 6°. Finally, sensor performance tests were conducted on the following of the crop row (Torii, 2000).
The purpose of this research was to develop a Tractor's Driver Assistant System (TDAS) as a modern technology for reducing his stresses and fatigue, save time and money and help to achieve sustainable agriculture with respect to social and economical situations of Iran as a developing country in which farmers do not have enough money to buy modern technologies from developed countries and, of course, sometimes buying them due to political conditions is impossible.
In this study first, the methods of aiding system of agricultural machines are explained and then the automatic system with its capabilities in MF285 tractors is proposed.
Debain et al. (2000) developed a guidance-assistance system for agricultural machines. It is based on analysis of the vehicle’s environment by image processing to deduce a control law in the image space. The results of this study the feasibility of such a project and the necessity to know the reliability of the image processing results to secure the viability of the complete system.
A guidance-assistance system for agricultural vehicles.
However, it is interesting to note that all approaches revert to basically two distinct modes:
| • | Guidance with respect to a directrix generated by fixed points in the field |
| • | Guidance with respect to a directrix generated by the previous pass or operation |
Typical systems that have been developed in the first mode include:
| • | Laser optical navigation system |
| • | Buried leader cables |
| • | Radio beacons |
| • | Center radial cable |
All of the mentioned systems have disadvantages that restricted their application, such as high capital investment, not mobility or complexity. For instance, the cost of buried cables as used in the second mode is difficult to justify on large fields that are not intensively farmed. Radio beacons can be portable and allow for changes in the direction of field operations. However, the cost of signal processing plus line of sight limitations appears to have limited the application of this approach to special situations where some of the characteristics, e.g., ability to operate at night or under fog conditions, can be exploited (Reid et al., 2000). In beside of these systems, there are modern technologies such as GPS, DGPS, RTK GPS, GDS machine vision and fusion sensors, which have some basic requirements for technology, investment and skill.
Typical studies reported in the second mode in some researches two wheels attached to mechanical linkages pin-connected to the tractor straddled the marker furrow, Harries and Ambler (1981) mounted optical sensors for non contact sensing of the furrow wall. Connor et al. (1996) developed a steering controller based on a set of linear motion equations. Automation requires a steering controller with stable and fast response. The design of steering controllers should compensate for non-linearity and many unknown factors involved in steering agricultural equipment.
The common feature in these approaches is that the measurement (or on-off indication) is the lateral distance (or offset) from a point on the tractor to the furrow being followed. In general, the various sensors used provided an indication of current offset.
But the most important advantages of these systems are simple construction, low cost and mobility. In this research we focused on developing late systems for most popular agricultural tractor in Iran, MF285 as appropriate technology because it has characteristics which are matched with definitions of appropriate technology such as:
| • | Being flexible and adaptable and are productive |
| • | Use locally available materials and can be produced in small workshops |
| • | Require only small amounts of capital |
| • | Do not require a high level of specialized training |
MATERIALS AND METHODS
The overall construction of system consists of three parts:
| • | Sensor |
| • | Controller |
| • | Actuator |
Sensor is made from several parts and suspensions which helps to follow the reference route and measures the deviation rate of tractor from this route. The sensor designed and fabricated in this research is consists of two main sector. The first is joined to body of tractor by means of screw and nut between front wheels (this is the upper sector of the sensor shown by A in Fig. 1). The other sector is pulled on the ground inside the reference route (this is the lower sector of sensor shown by B in Fig. 1). The lower sector follows the reference route created in previous pass. When the tractor deviates from the desired route, only the upper sector of sensor is taken by tractor away, while the lower sector is following the reference route. In this process a proportional motion occurs between the two sectors of the sensor shows amount of tractor’s deviation from desired route. The value of proportional motion of two sectors of sensor is measured by a potentiometer with a linear response (shown by C in the Fig. 1). By changing electrical resistance with respect to deviation value, the potentiometer works as a angle sensor. The outlet of potentiometer is a variable voltage signal. After discovering a lateral deviation, it is converted to appropriate voltage by the potentiometer. For reducing the response time, the sensor is put between the front wheels of the tractors. The shape of the followers is conical to reduce the friction and facilitate motion between the soil and followers. The number of followers was chosen two, because it will help the system to overcome the obstacles.
Controller collects the guiding signal from angle sensor which has been set to send reference signal (6 volts in this research) in zero deviation of tractor from desired route. By changing angle between to sector of the sensor voltage rises upper or comes lower from reference signal in regard to take place left or right deviation. Then controller conducts the steering fluid into appropriate path in definite amount. Changing the steering wheels and comparison with signal received from angle sensor is used as a feedback.
The hydraulic circuit of system is consists of a hydraulic pump, an electro-hydraulic direction control valve, sensitivity control valve and the suspensions. This system is added in parallel to steering system of the tractors but, driver can engages or disengages it from his seat. In this system, hydraulic fluid after passing from fluid flow control valve enters into a direction control valve and then conducted to appropriate side of steering hydraulic cylinder. The response time in steering process is dependent on the rate of fluid flow. The direction control valve is opened center and has 3 positions. It is stimulated by the pulses received from electronic circuit. It receives the required power from the battery of tractor. This valve works with a DC voltage of 12 volt and the current of 3.81 (Fig. 2 shows the schematic of hydraulic circuit and valves).
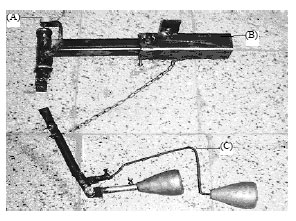 | |
| Fig. 1: | Elements of sensor; A: Upper sector, B: Furrow follower and C: Potentiometer |
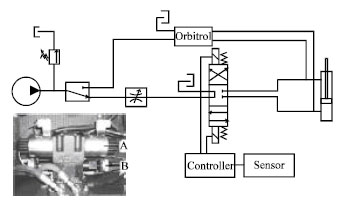 | |
| Fig. 2: | Hydraulic circuit and electro hydraulic valve; A: Pass control valve a B: Fluid volume control valve |
The experiments have been conducted in research and development workshop of Iran Tractor Manufacturing Company (ITMCO) in Tabriz city, Iran during 2006. In this research a Massy Ferguson tractor MF-285 as a most popular tractor in Iran was used. Its steering system is hydrostatic. Of course, the automatic guiding system developed in this research is applicable for all kind of tractors with hydrostatic steering system. For simulating field conditions and creating reference furrow as existing structure in the field, a route created in the floor of the workshop as its diameter was a little bigger than diameter of follower balls. For detecting the trace of the tractor in traveling a bottle of color fluid installed on the tractor which had a little vent. The color fluid was used as a marker during following the reference route. Distances of some random spots were measured from center line of the route in cm. In this experiment, the speed of tractor was 7 k h-1.
RESULTS AND DISCUSSION
For assessing the accuracy of system, the tractor deviations from central line have been considered. To obtain a correct approximation, several experiments conducted. At the experiments when the tractor crossed the reference route, system turn it back toward the route but it crossed the route again and this manner was repeated at the other side. Therefore, the tractor had a sinuosity motion and the distances of the ranges of this pass could be a good criterion for assessing that how efficient is this system. So, some distances from straight (desired) line were measured randomly. The measurements were done with an accuracy of 1 cm. In this experiment, fifty observations were recorded. Average accuracy of system was about ±9.5 cm and the standard deviation σx = 1.902 which had good agreement with the accuracy needed in agricultural tractors guidance systems. It means the tractor traveling in a route which is 20 cm wider than it’s actual width. The recorded observations in Fig. 3. shows the route traveled by the tractor in 30 m. The graph shows magnitude of deviation of the tractor in both sides of reference route. It looks like a sinuosity in traveling path, of course range of this deviation from the reference route is dependant to traveling speed, as the higher traveling speed, the wider range of deviation.
Statistical analysis showed that we had succeeded to develop new automatic guidance system with low cost (about 10% of other common systems) and simple construction (it just needs a furrow in the field as references line; of course It creates another guideline for next pass) the main reasons of this are no need to install fixed equipment in the field, eliminate adaptor equipment used on the tractor and using less sensor on it. Findings show the accuracy of 9.5 cm which has a good agreement with findings of researchers. Another goal achieved was compatibility with wide ranges of tractors, as it examined on MF399 and showed same results. But, accumulated errors in this system can affect the accuracy of creating of successive in parallel to reference route. Therefore, driver should create a new route manually frequently. But, overall it can be examined as an appropriate technology in countries like Iran. Therefore, this system can be used as a tractor driver assistant system in developing countries which consume low capital and needs low special skills which were the main objectives of this project.
 | |
| Fig. 3: | Recorded tracks of the tractor |
CONCLUSION
In this study, an automatic system was designed for tractor guiding in the farms. Using a mechanical sensor to measure the deviation values is one of its specifications. Also, it can be used for guiding the agricultural vehicles with the hydrostatic steering system using low cost. It has simple construction and need to be assessed more.
ACKNOWLEDGMENT
This work was supported by Iran Tractor Manufacturing Company (ITMCO). The support is gratefully acknowledged.
REFERENCES
- Kaminaka, M.S., G.E. Rehkugler and W.W. Guntzel, 1981. Visual monitoring in a simulated agricultural machinery operation. Hum. Factors, 23: 165-173.
Direct Link - Connor, M.O, T. Bell, G. Elkaim and B. Parkinson, 1996. Automatic steering of farm vehicles using GPS. Proceedings of the Paper Presented at the 3rd International Conference on Precision Agriculture, June 23-26, Minneapolis, MN., pp: 767-777.
Direct Link - Keicher, R. and H. Seufert, 2000. Automatic guidance for agricultural vehicles in Europe. Comput. Electron. Agric., 25: 169-194.
CrossRef - Reid, J.F., Q. Zhang, N. Noguchi and M. Dickson, 2000. Agricultural automatic guidance research in North America. Comput. Electron. Agric., 25: 155-167.
CrossRef - Torii, T., 2000. Research in autonomous agriculture vehicles in Japan. Comput. Electron. Agric., 25: 133-153.
CrossRef - Wilson, J.N., 2000. Guidance of agricultural vehicles a historical perspective. Comput. Electron. Agric., 25: 3-9.
CrossRef