
P. R. Sharma
Department of Mathematics, University of Rajasthan, Jaipur-302055, India
Giriraj Methi
Department of Mathematics, Poornima College of Engineering, Jaipur-302055, India
Asian Journal of Mathematics & Statistics
Year: 2011 | Volume: 4 | Issue: 3 | Page No.: 140-150







ABSTRACT
The aim of the study is to solve some linear and non-linear differential equations using Homotopy Perturbation Method. The brilliance of the method in obtaining analytical or approximate solutions of some linear and non-linear partial differential equations are compared with earlier results obtained by Adomian Decomposition Method. This method is more efficient and easy to handle such partial differential equation in comparison to other methods. Numerical results show the efficiency, accuracy and validation of the Homotopy Perturbation Method (HPM).
PDF Abstract XML References Citation
Received: February 25, 2011;
Accepted: March 18, 2011;
Published: May 30, 2011
How to cite this article
P. R. Sharma and Giriraj Methi, 2011. Applications of Homotopy Perturbation Method to Partial Differential Equations. Asian Journal of Mathematics & Statistics, 4: 140-150.
DOI: 10.3923/ajms.2011.140.150
URL: https://scialert.net/abstract/?doi=ajms.2011.140.150
DOI: 10.3923/ajms.2011.140.150
URL: https://scialert.net/abstract/?doi=ajms.2011.140.150
INTRODUCTION
Many linear and nonlinear problems are of fundamental importance in Science and Technology especially in Engineering. The investigation of exact or approximate solution of such problems has been one of the challenges before Mathematicians and Engineers. Some valuable contributions have already been made to solving differential equations arising in many scientific and engineering applications using numerical techniques such as Finite Difference Method (Krishnamurthy and Sen, 2001; El-Sayed and Kaya, 2004; Kumar, 2003; Dehghan, 2002, 2003), Tanh Method (Evans and Raslan, 2005), Adomian Decomposition Method (Ngarhasta et al., 2002; Babolian and Biazar, 2002; Pamuk, 2005; Taiwo and Odetunde, 2010; Biazer et al., 2006) etc. The other methods to solve differential equations suggest that in Finite Difference Method discretization of the variables leads to computational complexities while Adomian method narrow down its application due to calculation of complicated Adomian polynomials. Integral transforms such as Laplace and Fourier transforms are commonly used to solve differential equations and usefulness of these integral transforms lies in their ability to transform differential equations into algebraic equations which allows simple and systematic solution procedures. However, using integral transform in nonlinear problems may increase its complexity. Oghre and Olajuwan (2005) applied fourier transform to obtain solution of semi linear parabolic equations.
To over come disadvantage of FDM, ADM, Integral Transforms and other methods, He (2000, 2003b, 2006) first proposed the Homotopy Perturbation Method which has been applied to solve many functional equations and made the subject of extensive research. This method is combination of homotopy in topology and classic perturbation techniques, provides us with a convenient way to obtain analytic or approximate solutions to a variety of problems arising in fields. In this method the solution is considered as the summation of an infinite series which usually converges rapidly to the exact solution.
The HPM has been employed to solve a large variety of linear and nonlinear problems. This technique was used by He (2005, 2006) to find solution of nonlinear boundary value problems. Blasius differential equation was solved by He (2003a) using Perturbation technique. Biazer and Ghazvini (2009) presented solution of systems of Volterra Integral Equations same approach was applied by Chowdhary and Hashim (2007) to find solution of time dependent Emden-Fowler type. Abbasbandy (2007) employed the He’s homotopy perturbation technique to solve functional integral equations and the results obtained by Lagrange interpolation formula and HPM were compared. Biazer (2008) reported solution of Helmholtz equation by HPM.
Fazeli et al. (2008) investigated the solution of fourth order nonlinear parabolic equations using HPM. Also Ghotbi et al. (2008) obtained the solution of burgers and coupled burgers equations by HPM.
The aim of this study is to extend the Homotopy Perturbation Method (HPM) to find numerical solution of some linear and nonlinear partial differential equations and these results are compared with the earlier existing solutions.
ANALYSIS OF HOMOTOPY PERTURBATION METHOD
Let X and Y be the topological spaces. If f and g are continuous maps of the space X into Y, it is said that f is homotopic to g, if there is continuous map F: XxI (= [0,1]) → Y such that F (x, 0) = f (x) and F (x, 1) = g (x), for each x ![]() X, then the map is called homotopy between f and g.
X, then the map is called homotopy between f and g.
The homotopy perturbation method (He 1999, 2000, 2003b, 2006) is a combination of classical perturbation technique and the homotopy map used in topology. To explain the basic idea of the homotopy perturbation method for solving non-linear differential equations, integral equations or fractional differential equations, we consider the following nonlinear equation:
| (1) |
Subject to the boundary condition,
 | (2) |
where, A is a general differential operator, B is a boundary operator, f (r) is known analytical function, γ is the boundary of the domain D and ![]() denotes directional derivative in outward normal direction to D. The operator A, generally divided into two parts, a linear L and a non linear part N. Using A = L + N, Eq. 1 can be rewritten as:
denotes directional derivative in outward normal direction to D. The operator A, generally divided into two parts, a linear L and a non linear part N. Using A = L + N, Eq. 1 can be rewritten as:
| (3) |
By the homotopy technique, we construct a homotopy defined as:
| (4) |
which satisfies:
| (5) |
The above expression can be re-written as:
| (6) |
where, p![]() [0, 1] is an embedding parameter, u0 is the initial guess approximation of Eq. 1 which satisfies the boundary conditions. It follows from the Eq. 6 that:
[0, 1] is an embedding parameter, u0 is the initial guess approximation of Eq. 1 which satisfies the boundary conditions. It follows from the Eq. 6 that:
| (7) |
| (8) |
The embedding parameter p increases from 0 to 1 monotonically as a trivial problem.
H (u, 0) = L (u) L (u0) = 0 is continuously transformed to the original problem:
| (9) |
In topology, this process is known as continuous deformation. L (u)-L (u0) and A (u)-f (r) are called homotopic. The HPM method uses the embedding parameter p as a “small parameter” and write the solution of Eq. 6 as a power series of p i.e:
| (10) |
Setting p = 1 we obtain the approximate solution of Eq. 1 as:
| (11) |
| (12) |
The series of Eq. 12 is convergent for most of the cases. However, the convergent rate depends on the nonlinear operator N (u) the following suggestions have already been made by He (1999):
•The second derivative of N (u) with respect to u must be small because the parameter may be relatively large i.e p → 1 and
•The norm of:
 |
must be smaller than one so that the series is convergent
APPLICATIONS OF HPM
The flexibility and efficiency of Homotopy Perturbation Method (HPM) has been shown through following cases.
Case I: Consider the following linear second order partial differential equation:
 | (13) |
with initial condition w (x, 0) = ex-x and boundary conditions:
| (14) |
To find solution by HPM, we construct the homotopy in the following form:
 | (15) |
Substituting the Eq. 13 into Eq. 15 and equating the coefficients of like powers of p, we get:
 | (16) |
Let us select w (x, 0) = ex-X as an initial approximation, from Eq. 15 following terms are calculated successively:
| (17) |
Now, the solution of Eq. 13 when p → 1 will be reduced to:
| (18) |
which is exactly the same solution obtained by Inc et al. (2004) using the Adomian Decomposition Method.
Case II: Consider linear second order dissipative wave equation:
| (19) |
with initial conditions:
 |
and boundary conditions:
| (20) |
To find solution by HPM, we construct the homotopy in the following form:
 | (21) |
Substituting the Eq. 11 into the Eq. 21 and equating the coefficients of like powers of p, we get:
 | (22) |
Let select w (x, 0) = x2 as an initial approximation, then from Eq. 22 the following terms are calculated successively:
| (23) |
Now, the solution of Eq. 19 when p → 1 will be as follows:
| (24) |
which is an exactly the same solution obtained by Inc et al. (2004) using the Adomian Decomposition Method.
Case III: Consider the following second order linear partial differential equation:
 | (25) |
with initial condition w (x, 0) = x2, 0≤ x≤ 1 and boundary conditions:
| (26) |
To find solution by HPM, we construct the homotopy in the following form:
 | (27) |
Substituting the Eq. 11 into Eq. 27 and equating the like powers of p, we get:
 | (28) |
Let select w (x, 0) = x2 as an initial approximation, then from Eq. 23 following terms are calculated successively:
| (29) |
Now, the solution of Eq. 25 when p → 1 will be reduced to:
| (30) |
For some specified values of x and t, the numerical results using HPM and Finite Difference Method are derived and given below.
It is observed from the Table 1 that the numerical results obtained using HPM are fully matched with the results obtained by FDM.
Case IV: The telegraph equations appear in the propagation of electrical signals along a telegraph line, digital image processing, telecommunication, signals and systems. Consider the following telegraph equation:
 | (31) |
| Table 1: | Comparison between FDM and HPM for different values of x and t |
 | |
with initial conditions:
 |
and boundary conditions:
 | (32) |
The given telegraph equation is a second order partial differential equation. To determine its solution by HPM, we construct the homotopy in the following form:
| (33) |
Substituting the Eq. 11 into Eq. 33 and equating the coefficients of like powers of p, we get:
 | (34) |
Let us select w (x, 0) = x as an initial approximation, then from Eq 33 the following terms are calculated successively:
| (35) |
Now, the solution of Eq. 31 when p → 1 will be reduced:
| (36) |
which is an exactly the same solution obtained by Kaya (1999) using the Adomian Decomposition Method
Case V: Consider the following second order nonlinear partial differential equation:
 | (37) |
with initial conditions:
| (38) |
To find the solution by HPM, we construct the homotopy in the following form:
| (39) |
Substituting the Eq. 11 into Eq. 39 and equating the coefficients of like powers of p, we get:
 | (40) |
Let us take te-x as an initial approximation, then from Eq. 40 the following terms are calculated successively:
| (41) |
Now, the solution of Eq. 37 when p → 1 will be reduced to:
| (42) |
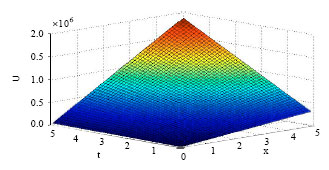
which is an exactly the same solution obtained by Wazwaz (2006) using the Adomian Decomposition Method. For different values of x and t, the solutions of cases (I to V) are shown through Fig. 1-5, respectively.
 | |
| Fig. 1: | Variation of w = ex-x-t for different values of x and t |
 | |
| Fig. 2: | Variation of w = x2 + t2 for different values of x and t |
 | |
| Fig. 3: | Variation of w = x2 et + 2te t for different values of x and t |
 | |
| Fig. 4: | Variation of w = te x for different values of x and t |
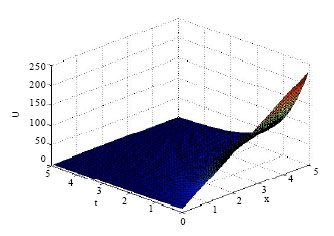 | |
| Fig. 5: | Variation of w = te-xfor different values of x and t |
CONCLUSION
Solution of linear and nonlinear partial differential equations can be obtained using Homotopy Perturbation Method (HPM) without any discretization of the variables. Therefore, it is not affected by rounding errors in computational process. The flexibility and ability of HPM is to solve partial differential equations without calculation of complicated Adomian polynomials or unrealistic nonlinear assumptions. Therefore HPM can be seen as a promising tool for solving linear and nonlinear partial differential equations.
REFERENCES
- Dehghan, M., 2002. Second order schemes for a boundary value problem with neumann's boundary conditions. J. Applied Math. Computat., 138: 173-184.
CrossRef - Dehghan, M., 2003. Numerical Solution of one dimensional parabolic inverse problem. Applied Math. Computat., 136: 333-344.
CrossRef - Evans, D.J. and K.R. Raslan, 2005. The Tanh function method for solving some important non-linear partial dfferential equation. Int. J. Computat. Math., 82: 897-905.
CrossRefDirect Link - Biazar, J., M. Ilie and A. Khoshkenar, 2006. An improvement to an alternating algorithm for computing adomian polynomials in special cases. Applied Math. Computat., 173: 582-592.
CrossRef - He, J.H., 1999. Homotopy perturbation technique. Comput. Methods Applied Mech. Eng., 178: 257-262.
CrossRefDirect Link - He, J.H., 2000. A coupling method of a homotopy technique and a perturbation technique for non-linear problems. Int. J. Non-Linear Mech., 351: 37-43.
Direct Link - He, J.H., 2003. Homotopy perturbation method: A new nonlinear analytical technique. Applied Math. Comput., 135: 73-79.
CrossRefDirect Link - He, J.H., 2003. A simple perturbation approach to Blasius equation. Applied Math. Comput., 140: 217-222.
CrossRefDirect Link - He, J.H., 2005. Application of homotopy perturbation method to nonlinear wave equations. Chaos Solitons Fractals, 26: 695-700.
CrossRefDirect Link - He, J.H., 2006. Homotopy perturbation method for solving boundary value problems. Phys. Lett. A, 350: 87-88.
CrossRef - Biazar, J. and H. Ghazvini, 2009. He's homotopy perturbation method for solving systems of Volterra integral equations. Chaos, Solitons Fractals, 39: 770-777.
CrossRef - Abbasbandy, S., 2007. Application of He's homotopy perturbation method to functional integral equations. Chaos Solitons Fractals, 31: 1243-1247.
CrossRef - Biazar, J., 2008. He's homotopy perturbation method for solving helmholtz equation. Int. J. Contemp. Math. Sci., 3: 439-443.
Direct Link - Inc, M., Y. Cherrualt and K. Abbaoui, 2004. A computational approach to the wave equations: An application of the decomposition method. Kybernates, 33: 80-97.
CrossRefDirect Link - Wazwaz, A.M., 2006. The modified decomposition method for analytic treatment of differential equations. Applied Math. Computat., 173: 165-176.
CrossRef - Fazeli, M., S.A. Zahedi and N. Tolou, 2008. Explicit solution of non-linear fourth-order parabolic equations via homotopy perturbation method. J. Applied Sci., 8: 2619-2624.
CrossRefDirect Link - Ghotbi, A.R., A. Avaei, A. Barari and M.A. Mohammadzade, 2008. Assessment of He's homotopy perturbation method in burgers and coupled burger's equations. J. Applied Sci., 8: 322-327.
CrossRefDirect Link - El-Sayed, S.M. and D. Kaya, 2004. Comparing numerical methods for Helmholtz equation model problem. Applied Math. Computat., 150: 763-773.
CrossRef - Taiwo, O.A. and O.S. Odetunde, 2010. On the numerical approximation of delay differential equations by a decomposition method. Asian J. Math. Stat., 3: 237-243.
CrossRefDirect Link - Oghre, E.O. and B.I. Olajuwon, 2005. Fourier transform solution of the semi-linear parabolic equation. J. Applied Sci., 5: 492-495.
CrossRefDirect Link - Ngarhasta, N., B. Some, K. Abbaoui and Y. Cherruault, 2002. New numerical study of adomian method applied to a diffusion model. Kybernetes, 31: 61-75.
Direct Link - Babolian, E. and J. Biazar, 2002. On the order of convergence of adomian method. Applied Math. Comput., 130: 383-387.
CrossRefDirect Link - Pamuk, S., 2005. An application for linear and nonlinear heat equations by Adomain`s decomposition method. Applied Mathematics Comput., 163: 89-96.
CrossRef - Kumar, M., 2003. A difference method for two point singular boundary value problems. Applied Math. Comput., 146: 879-884.
CrossRef - Chowdhury, M.S.H. and I. Hashim, 2007. Solutions of time-dependent emden-fowler type equations by homotopy-perturbation method. Phys. Lett. A, 368: 305-313.
CrossRef