
E. Elbeltagi
Department of Structure Engineering, Faculty of Engineering, Mansoura University, Mansoura, 35516, Egypt
M.R. Kaloop
Department of Public Works Engineering, Faculty of Engineering, Mansoura University, Mansoura, 35516, Egypt
M.T. Elnabwy
Department of Structure Engineering, Faculty of Engineering, Mansoura University, Mansoura, 35516, Egypt
Asian Journal of Earth Sciences
Year: 2015 | Volume: 8 | Issue: 4 | Page No.: 114-126







ABSTRACT
This study presents Mansoura steel railway bridge, Egypt, movement analysis in response to passing trains. This bridge was used for two types of traffics which are trains on the middle and one vehicle lane on each side of the bridge. A monitoring system is designed based on the Real Time Kinematic Global Positioning System (RTK-GPS) to monitor and assess the bridge behaviour and movements under the effect of trains’ loads. Two methods are used to de-noise the GPS data, which are moving average filter (FM) and Wavelet Transform (WT). In addition; the wavelet decomposition is used to classify the noise effects. The time and frequency domain GPS observation analysis results are discussed and the results showed that the bridge is safe under affected train loads in time and frequency domain. Also, it can be concluded that the WT can be used to filter the GPS monitoring data but can’t be used to extract the dynamic frequencies. Otherwise, the multiple filters are more suitable method to extract dynamic frequencies for the low sampling GPS frequency instruments.
PDF Abstract XML References Citation
Received: August 28, 2015;
Accepted: October 21, 2015;
Published: November 07, 2015
How to cite this article
E. Elbeltagi, M.R. Kaloop and M.T. Elnabwy, 2015. GPS-Monitoring and Assessment of Mansoura Railway Steel-Bridge Based on Filter and Wavelet Methods. Asian Journal of Earth Sciences, 8: 114-126.
URL: https://scialert.net/abstract/?doi=ajes.2015.114.126
URL: https://scialert.net/abstract/?doi=ajes.2015.114.126
INTRODUCTION
Now a days, the Global Positioning System (GPS) is used widely to monitor and measure three-dimensional (3D) displacements of large engineering structures. The GPS is used for the determination of long-term stability and movement of bridges, dams and other similar projects. The GPS, as well as some of the classical terrestrial geodetic measuring techniques were employed with the aim of assessing the nature, directions and velocities of deformations of the monitored bridge abutment pier and the adjoining railway track structures (Otakar and Pavel, 2004; Sabova and Jakub, 2005). Im et al. (2013) and others (CECW-EE., 2002; Roberts et al., 2008; Knecht and Manetti, 2011; Yi et al., 2013) summarized and applied GPS technology for Structural Health Monitoring (SHM). For GPS surveying accuracy specifications are applied to ensure detection of a given movement under normal operating conditions. Allowable survey error thresholds are related to the maximum expected displacement that would occur between repeated measurement campaigns. For each survey, final positioning accuracies at the 95% probability level should be less than or equal to one-fourth of the predicted displacement value (CECW-EE., 2002; Knecht and Manetti, 2011). Berber et al. (2012) introduced the GPS methodology observations techniques and studied the accuracy of different techniques.
Configuring reactions of engineering structures in a time domain as functions of time are generally inadequate for certain applications and frequency domain analysis has been successfully applied to several large scale structures (Erdogan and Gulal, 2009). Moschas and Stiros (2013) concluded that the frequency range 0.4~5.0 Hz covers a wide variety of dynamic displacement component and frequency range 0~0.4 Hz corresponds to semi-static displacement component. However, For the GPS-SHM process analysis the noise remove and analysis should be done first to improve and detect the movement components of structure in time and frequency domains.
The existing practice of noise removal in GPS monitoring data is by Fourier transformation which assumes the GPS data to be time-stationary. Hence, denoising of GPS data using Fourier transform is often deemed to be in-effective (Kaloop and Kim, 2014a; Ogundipe et al., 2014). This paved the way to Wavelet Transform (WT) that can denoise the non-stationary time series data (Yang and Nagarajaiah, 2014). Moreover, the wavelet denoised time series data as input data is expected to boost the efficiency of determining the relative acceleration behaviour of a structure. However, it has been proved that the existing wavelet denoising technique may not yield optimum results due to the poor choice of the global thresholds. The GPS data splits into two parts by passing it through a high-pass and low-pass filter at every frequency range level and it decomposes into two complementary signals: the approximations and the details (Mathworks, 2008).
In this study, lateral, longitudinal and vertical movements of the main girder of Mansoura railway steel bridge under trains’ loads are analyzed using the time series analysis. Trend and periodic of the 1 Hz GPS time history series were determined by time series analysis. The analyses of the periodic component from time domain to frequency domain are done by the spectrum analysis with the use of Fast Fourier Transform (FFT) low and high frequencies of the bridge. In addition, the wavelet transform is used to analyze the monitoring data components.
Mansoura railway steel bridge, constructed on 1913, is the oldest bridge in Mansoura, Egypt. Since that time, this research presents the first study for monitoring the behavior of this bridge. As shown in Fig. 1, the bridge comprises of four truss girders and five spans. Each truss span is 70.00 m. This bridge was used for two types of traffics which are trains on the middle (double-track) and one vehicle lane on each side of the bridge. This bridge is used to connect the Egyptian railway lines between the east and west Damietta Nile river branch. In this study, the Real Time Kinematic (RTK) GPS (1 Hz) technique is used to study the movement of Mansoura railway bridge under current train loads. For the RTK survey base station is set up over stable ground, as shown in Fig. 1 and the radio transmitter is attached. Yeh et al. (2012) concluded that the rover station must be located within ~10 km of the reference station to achieve one centimeter level accuracy and it is sunned by Berber and Arslan (2013). In this study, the distance between the base station and rover’s positions is 188.0 m.
 | |
| Fig. 1: | Mansoura railway bridge and GPS monitoring system |
The data presented in this study is collected from rover GPS receivers clamped at the top of the mid-span o the first girder (R1) to study the girder movement of the bridge (Fig. 1). The monitoring point is located on the top of the upper girder as shown in Fig. 1. The measuring conditions were favorable for the receiver, which was free of any obstruction at 15° angle view of the horizon and at least 4 satellites were tracked continuously. The selected observation point is open sky to decrease the errors due to Multipath. The time observation for the rover point is 40 min, approximately, when trains were passing over the bridge. The GPS base and rover receiver recorded at 1 Hz.
MATERIALS AND METHODS
The trend and periodic lateral, longitudinal and vertical movements of the main girder of Mansoura railway steel bridge under effective loads using time series analysis consisted of the following steps.
Coordinate transformation and apparent displacement calculation: The data collected was pre-processed using GPS-Trimble software. The output of the GPS software was the time series of the instantaneous cartesian coordinates of the rover receiver in the WGS84 coordinate system (x, y, z). A local bridge coordinate system (x, y, z) was established to be used in the analysis and evaluation of the observed data (Roberts et al., 2004). The azimuth of the bridge is 21°52’ 23.29’’, based on two monitoring point on the bridge girder. Herein, the x-data represents the displacement changes along the longitudinal direction of the bridge, the y-data represents the displacement changes along the transverse direction of the bridge and the z-data represents the relative displacement change a long the altitude direction of the bridge. The similarity transformation was used to extract the time series displacement observations of the x, y and z directions around a relative zero representing the equilibrium level of the monitored point (Moschas and Stiros, 2013). Figure 2 shows the three dimensions time series movement for point R1 during the passing of three trains on the bridge in both directions. The observed time when the trains passed on the bridge were from 839-869 sec (T1), 1309-1331 sec (T2) and 1630-1649 sec (T3), respectively.
Filtering the monitored GPS displacements: From previous studies (Roberts et al., 2004; Yeh et al., 2012; Moschas and Stiros, 2013), it is known that the time series of GPS displacement calculations is contaminated by noise. For this reason, filters must be used to extract the semi static displacement component of the time series (Gikas, 2012; Moschas and Stiros, 2013). In first hand, the Moving Average (MA) filter with 25 sec window is used to de-noise the GPS time history observation and extract the semi static displacement of the bridge girder (Fig. 2a). The dynamic displacement is computed after subtracting the semi static displacement from the apparent displacement of the GPS observations (Fig. 2b).
In another hand, the WT is used to denoise and calculate the semi-static and dynamic displacement components based thresholding technique for the GPS data. It automatically checks the enormity of the noise present in the signal. This is done by classifying the WT into four zones and then applying the thresholding rules depending on the characteristics of the WT and the thresholds. In general, denoising procedures apply the thresholding rules over the entire domain of WT. But, the real time GPS data are a mixture of different levels of low, moderate and high frequency noise. This implies that applying the global threshold over the entire domain might cut off important parts of the true function underlying the threshold. While reconstruction, this may retain certain amount of noise.
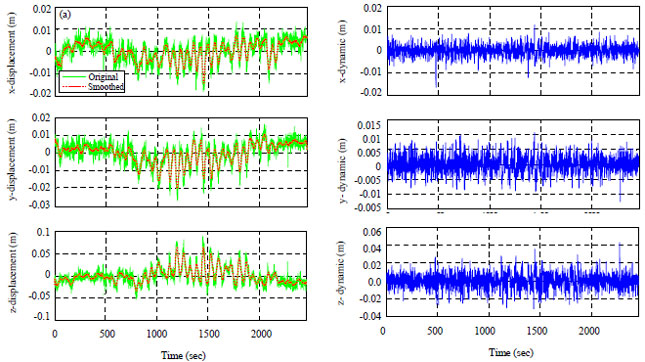 | |
| Fig. 2(a-b): | (a) Apparent displacement (original) and extracted semi static (smoothed) displacement and (b) Extracted dynamic displacement from RTK-GPS observations |
Hence, it has been proved that a localized thresholding scheme (Mathworks, 2008; Kaloop and Kim, 2014a; Ogundipe et al., 2014) with a combination of the hard, garrotte, semi-soft and soft thresholding rules is indeed required for non stationary signals (Mathworks, 2008). The key features in implementing the proposed rule based denoising procedure are (i) taking the WT on the observed GPS data and obtain the initial WT, (ii) determination of the initial global threshold, (iii) dividing the WT into four local regions, (iv) determination of the local threshold in the localized regions, (v) application of the corresponding thresholding rules in the localized regions, (vi) combining the thresholded WT of all the regions as the global modified thresholded WT and (vii) performing inverse WT on the modified thresholded WT.
GPS displacement frequency identification: The transformation of the time series observations from the time domain to the frequency domain is performed by applying the Fast Fourier Transform (FFT) (Erdogan and Gulal, 2009; Kaloop and Kim, 2014b). In addition, the power spectrums for the low and high frequencies components of the time series were calculated. Figure 3 and 4 show the first mode frequency components every five minutes of the GPS semi static and dynamic displacement calculation in the x, y and z directions to extract the bridge movement mode with time. In addition, the double differentiation procedure is used to convert the GPS measured time series displacement in the x, y and z directions to acceleration time series (Roberts et al., 2004). Also, the frequencies are computed from the calculated acceleration based on butter band pass filter, Multiple Filters (MF) and compared with previous time and frequency domain calculations, as shown in Fig. 5. Moreover, the frequency can be calculated from the detail signal component and the energy frequency power can be seen in Fig. 6 and Table 1 and 2.
 | |
| Fig. 3(a-d): | (a) z-apparent frequency, (b) z-semi static frequency, (c) Time frequency semi static displacement and (d) Time frequency dynamic displacement |
RESULTS AND DISCUSSION
From Fig. 2a, it is seen that the periodic of signals is clear from the time 810-2100 sec due to passing of trains at this time period. In addition, the correlation between the recorded and filtered data is very high with no displacement information losses. Accordingly, the MA filter is suitable to extract the semi-static displacement from GPS recorded observations (Moschas and Stiros, 2013). Also, it can be seen that the x and y directions movements occur in the same direction and z-direction displacement occurs in the opposite direction at the same time interval of the passing trains. It is noticed that the maximum displacements are 14.0, 20.0 and 63.0 mm and the mean displacements are 1.85e-4, 9.9e-4 and 6.83e-3 mm. The standard deviation displacements are 4.1, 5.5 and 16.5 mm in the x, y and z directions, respectively. The correlations between the three dimensions displacements are 0.82 (x and y), -0.54 (x and z) and -0.72 (y and z).
These results indicate that the correlation between x and y directions is very high positive correlation; while the correlations between x and y directions with z-direction are low and negative correlation duo to passing of trains. Accordingly, it can be concluded that the performance of the GPS observations is very high sensitive with trains passing on the bridge and the semi-static bridge behaviour under train passes is safe. In addition, the correlation between the two directions (x and y) movements and z-direction movement are strongly influenced.
 | |
| Fig. 4(a-c): | Dynamic frequency displacement modes in directions, (a) x, (b) y and (c) z |
| Table 1: | Energy distribution for the approximate and each detail level for monitoring directions |
 | |
| Table 2: | High power frequency content comparison |
 | |
| FM: Moving average filter, WT: Wavelet transform, MF: Multiple filter | |
From Fig. 2b, it is shown that the dynamic displacement contains a remnant noise (Moschas and Stiros, 2013). The extracted dynamic displacement can be used to examine the quality of the filter used and guide to understand the behavior of structures under affecting loads. Also, the dynamic displacements ranges are 28.0, 23.3 and 74.5 mm and the standard deviations are 2.5, 3.0 and 8.8 mm in the x, y and z directions, respectively. This result indicates that the maximum dynamic displacement is occurred in the z-direction and y then x directions. In addition, as per the observed conditions, it is concluded that the dominant noise for the dynamic displacement is vibration noise.
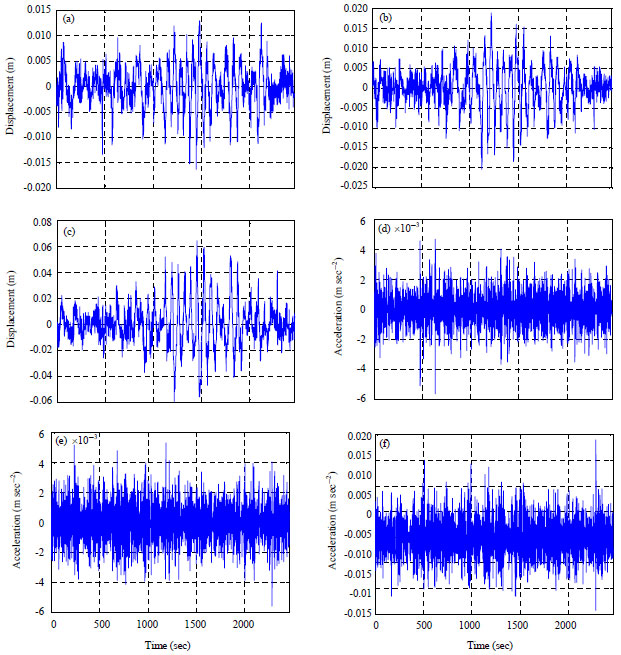 | |
| Fig. 5(a-f): | Extracted, (a-c) Dynamic displacement and (d-f) Acceleration, respectively |
As per examining Fig. 3a-b and 4c, the apparent calculated frequency based on high pass filter contains the two frequency semi-static (Fig. 3b) and dynamic (Fig. 4c). In addition, the high power spectrum is apparent; semi static and dynamic for the z-direction are equal. Thus means that the vibration noise affects the GPS dominant frequency calculations in static, semi-static and dynamic displacements. For this reason, the frequency calculations are divided into semi-static and dynamic based MA filter and dynamic signals, respectively (Fig. 3c and d).
Based on the recorded data, the trains passed on the bridge at the 15th, 25th and 30th min. From Fig. 3c and d, it can be seen that the bridge first mode signal groups are equally for the three direction movements in semi-static and dynamic movement components. But the dominant frequencies shapes are mostly not equal. It means that the dominant frequency at load cases are occurred due to the train’s passes otherwise occurred due to ambient environmental and observation noise. In addition, the frequency is higher at the 15th min than other announced frequency; this is due to the train passing time is near the observation point. Otherwise, at the 25th and 30th min is via versa with other announced frequency. Also, it can be seen that the correlation between the frequency domains in the three dimensions is high during the monitoring time, approximately. The results, also, show the significant dominant high and low frequency of the apparent displacement in x, y and z directions are close to 0.015 and 0.004 Hz, respectively. The z direction power spectrum in low and high frequencies are higher than x and y directions. It means that the high and low frequencies reflected the expected movements of the bridge (Erdogan and Gulal, 2009). The frequency modes of the structure can be extracted from dynamic displacement, as shown in Fig. 4.
The first to five frequency modes are 0.015, 0.03, 0.05, 0.10 and 0.125 Hz. Also, it can be seen that the power spectrum in z-direction is higher than other directions. Thus means that the semi-static frequencies are between 0~0.4 Hz and this result cited in Moschas and Stiros (2013). From these results, it can be concluded that the bridge movement under affecting loads in frequency domain is also safe. From Fig. 5, it can be seen that the dynamic displacement calculation reflects the effect of the trains passing on the bridge. The maximum range displacements are 3.0, 4.0 and 12.4 cm in x, y and z directions, respectively. The dynamic displacement is occurred during the time period from 810-2100 sec. From these results, it can be seen that the dynamic displacement calculated based on band pass filter is better than the dynamic displacement extracted from MA filter process (Fig. 2b). A double differentiation procedure applied to convert the dynamic GPS displacement calculations to acceleration time series (Roberts et al., 2004). The FFT is applied to calculate the frequency domain as shown in Fig. 6. From this figure, it can be seen that the high power frequencies in x, y and z directions are 0.125, 0.165 and 0.178 Hz, respectively. The frequencies modes are shown in between 0.05-0.3 Hz. From these results, it can be concluded that the Butter band pass filter can be used to extract the time and frequency domain for GPS dynamic displacement.
The wavelet transforms analysis can be used to denoise and extract movement components and analyze the displacement components as follow: the db4 mother wavelet analysis at level 4 is used to calculate the components in detail and approximate level of signals data. This selection based on trial to find a good approximate denoised level that can be used. The detail and approximate contents for the GPS displacement of z direction is shown in Fig. 7. Figure 7 represents the z direction movement wavelet components for four levels selected. From this figure, it can be seen that the wavelet level 4 is a long period component displacement of bridge with more clear from noises and errors. In addition, the accuracy of displacement approximate component of wavelet is increased with the increased the level of components (the selection of level decomposition of signals depends on the correlation between observation displacements and approximate level extracted). Comparing the results of MA and wavelet denoising show that the standard deviation of signal filter for the MA and WT methods are 1.65 and 1.87 cm, respectively and the correlation between original and denoising signals are 0.90 and 0.92, respectively. Thus means that the WT method can be used to extract the long period components of the bridge displacement but the filter method is better. In addition, for the detail level of displacement components, it can be shown that the vibration components are clearer with train passes on the bridge and the frequency components and energy can be calculated. Also, the detail coefficient level of WT can be used to classify the noise and errors for the GPS monitoring data.
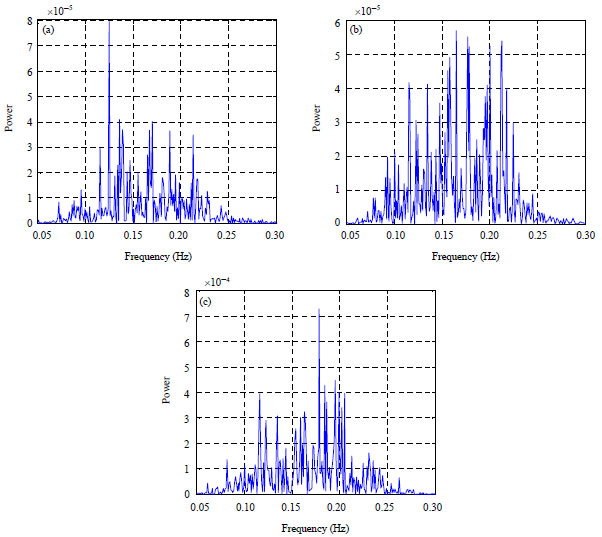 | |
| Fig. 6(a-c): | Extracted dynamic frequency calculation for, (a) x, (b) y and (c) z |
Whereas the standard deviations of details reconstruction functions are 3.6,4.1, 4.7, 3.9 mm for levels 1, 2, 3 and 4, respectively. It means that the dynamic displacement component is dominant at levels 2 and 3 for the detail reconstruction functions.
Moreover, the frequency energy calculations for the detail level components are shown in Table 1. The total energy of a discrete signal is the sum of the squares of its values; the total energy distributes the frequency components on the different decomposition levels.
From Table 1, it can be seen that the approximate level 4 contains a static and semi-static component frequency of 78.98, 82.95 and 83.99% for the x, y and z directions, respectively. It means that the GPS measurements can be used to distribute the semi-static frequency contents and other distributions are refers to the dynamic frequency contents and noise. However, the dynamic frequency contents can’t be extracted based on the sampling frequency used as a sampling frequency of more than 10 Hz should be used. In addition, the Ea for the z direction is greater than that for x and y directions which means that the semi-static frequency component is more clearly in z direction during train passes. Moreover, it can be seen that the dynamic behaviour can be extracted from the 1 Hz GPS monitoring system is 14% from the total behaviour of monitoring movement in z direction.
 | |
| Fig. 7(a-b): | GPS-z displacement contents (a) Approximate reconstruct functions level and (b) Detail reconstruct functions level |
Otherwise, the high total energy for the detail levels components indicate that the dynamic components in x and y directions can be extracted from levels 2 or 3, while for z direction can be extracted from level 3. It means that, the dynamic frequency modes for x and y directions are in between 0.125-0.5 Hz and for z direction in between 0.125-0.25 Hz.
Figure 8 shows the extracted frequency compensates from the wavelet transform analysis at level 3 for x, y and z, respectively. From Fig. 4, 5 and 8; it can be seen that the power values for FM and WT are very close. It is concluded that the details level components for the GPS monitoring signals can’t reflect the dynamic behaviour of the bridge. This may be, due to the low sampling frequency used. Accordingly, a high sampling frequency should be used to extract the full dynamic behaviour for the case study bridge.
The MF application is used widely in the image and signal processing application (Jiang, 1998; Shafiq and Ejaz, 2010). In dynamic structural performance analysis, the used of multi filter is still limited. Moschas and Stiros (2011) used the MF method to extract the dynamic performance of bridge and they found this method is acceptable to extract the frequency modes from GPS and accelerometer monitoring systems. In addition, Elnabwy et al. (2013) extracted the dynamic performance of bridge using MF and they found that this method can be applied to remove the short period components and extracted the dynamic performance. Moreover, the semi-static and dynamic frequency components should be considered with analyzes the performance of structures in frequency domain (Kaloop and Hu, 2015). Therefore, the three previous methods (FM, MF and WT) are used and discussed to extract the frequency components. Previously the three methods are used to extract the dynamic frequency component (Moschas and Stiros, 2011; Elnabwy et al., 2013; Kaloop et al., 2015). Therefore, this section aims to comparison between the three methods and apply the suitable method to extract the semi-static frequency component.
 | |
| Fig. 8(a-c): | Frequency components for the detail function at level 3 for (a) x, (b) y and (c) z direction |
Table 2 shows the comparison between the frequencies calculated from previous methods used. From Table 2, it can be seen that the semi-static frequency component is constant (0.077 Hz) for the three directions by WT method, while the frequencies calculation are changes with FM method. Because the rigidity monitoring point it can be seen that the frequencies content are acceptable with WT method (Kaloop and Kim, 2014b; Kaloop and Hu, 2015). Moschas and Stiros (2011) shown that the dynamic frequency contents are almost changes for the three directions. Therefore, from the results represented in Table 2, it can be concluded that the FM and WT are not suitable to extract the dynamic behaviour of structures in frequency domain, while MF is applicable for use. In addition, it can be seen that the x frequency component is almost not different for the three methods; it means that the behaviour of this direction is not effective. These indicated that the study results cited in Moschas and Stiros (2011) and Elnabwy et al. (2013) insure this fact. Otherwise, it is seen that the WT can be used to extract a static frequency component, which is 0.077 Hz for the three directions.
CONCLUSION
Mansoura railway steel bridge is constructed on 1913 and this is the first study for monitoring the behaviour of the bridge. The system monitoring used is RTK-GPS (1 Hz) technique to study the movement of the bridge under train loads. The moving average filter is used to de-noise the apparent GPS displacement observation. The butter band pass filter and Fast Fourier Transform (FFT) are used to extract the bridge dynamic displacement and frequency modes. The conclusions and recommendations drawn from this study are as follows:
| • | The RTK-GPS one-Hz can provide valuable deformation data of the structure members in time and frequency domain. The Moving Average filter (FM) is suitable and simple to extract the static and semi-static displacement of structures based on GPS monitoring observation. Furthermore, the butter band pass filter is a best solution to extract the dynamic and frequency modes of structures. Otherwise, the WT is suitable to extract a static frequency component |
| • | The WT method can be used to extract the long period components of bridge displacement but the filter method is better. In addition, for the detail level of displacement components, it can be concluded that the vibration components are clearer with train passes on the bridge and the frequency components and energy can be calculated. Also, it is concluded that the detail coefficient level of WT can be used to classify the noise and errors for the GPS monitoring data |
| • | The approximate level 4 for the WT contains a static and semi-static component frequency contents and it can be distribute a 78.98, 82.95 and 83.99% for the x, y and z directions, while the dynamic content distribute 21.01, 17.05 and 16.01%, respectively. As such as, it can be seen that the 1 Hz GPS can be used to distribute the most of semi-static frequency contents. However, the dynamic frequency contents can’t be extracted based on the sampling frequency used, so a sampling frequency of more than 10 Hz should be used to enable extracting the full dynamic contents frequencies. Finally, it can be concluded that the Mansoura railway steel bridge is safe based on the current passing train loads in time and frequency domains analysis. In the other hand, there is a need to monitor the bridge under trains and traffic loads with high sampling GPS properties to conclude the final recommendations |
REFERENCES
- Berber, M. and N. Arslan, 2013. Network RTK: A case study in Florida. Measurement, 46: 2798-2806.
CrossRefDirect Link - Berber, M., A. Ustun and M. Yetkin, 2012. Comparison of accuracy of GPS techniques. Measurement, 45: 1742-1746.
CrossRefDirect Link - Elnabwy, M.T., M.R. Kaloop and E. Elbeltagi, 2013. Talkha steel highway bridge monitoring and movement identification using RTK-GPS technique. Measurement, 46: 4282-4292.
CrossRefDirect Link - Erdogan, H. and E. Gulal, 2009. The application of time series analysis to describe the dynamic movements of suspension bridges. Nonlinear Anal.: Real World Applic., 10: 910-927.
CrossRefDirect Link - Gikas, V., 2012. Ambient vibration monitoring of slender structures by microwave interferometer remote sensing. J. Applied Geodesy, 6: 167-176.
CrossRefDirect Link - Im, S.B., S. Hurlebaus and Y.J. Kang, 2013. Summary review of GPS technology for structural health monitoring. J. Struct. Eng., 139: 1653-1664.
CrossRefDirect Link - Jiang, Q., 1998. On the design of multifilter banks and orthonormal multiwavelet bases. IEEE Trans. Signal Process., 46: 3292-3303.
CrossRefDirect Link - Kaloop, M.R. and D. Kim, 2014. De-noising of GPS structural monitoring observation error using wavelet analysis. Geomatics Nat. Hazards Risk, (In Press).
CrossRefDirect Link - Kaloop, M.R. and D. Kim, 2014. GPS-structural health monitoring of a long span bridge using neural network adaptive filter. Surv. Rev., 46: 7-14.
CrossRefDirect Link - Kaloop, M.R. and J.W. Hu, 2015. Optimizing the De-Noise neural network model for GPS time-series monitoring of structures. Sensors, 15: 24428-24444.
CrossRefPubMedDirect Link - Kaloop, M.R., E. Elbeltagi and M. Elnabwy, 2015. Bridge monitoring with wavelet principal component and spectrum analysis based on GPS measurements: Case study of the Mansoura Bridge in Egypt. J. Perform. Constr. Facil., Vol. 29.
CrossRefDirect Link - Moschas, F. and S. Stiros, 2011. Measurement of the dynamic displacements and of the modal frequencies of a short-span pedestrian bridge using GPS and an accelerometer. Eng. Struct., 33: 10-17.
CrossRefDirect Link - Moschas, F. and S. Stiros, 2013. Noise characteristics of high-frequency, short-duration GPS records from analysis of identical, collocated instruments. Measurement, 46: 1488-1506.
CrossRefDirect Link - Ogundipe, O., J.K. Lee and G.W. Roberts, 2014. Wavelet de-noising of GNSS based bridge health monitoring data. J. Applied Geodesy, 8: 273-282.
CrossRefDirect Link - Roberts, G.W., X. Meng and A.H. Dodson, 2004. Integrating a global positioning system and accelerometers to monitor the deflection of bridges. J. Surv. Eng., 130: 65-72.
CrossRefDirect Link - Shafiq, M.A. and S. Ejaz, 2010. Real time implementation of multi-level perfect signal reconstruction filter bank. Int. J. Eng. Technol., 10: 40-47.
Direct Link - Yi, T.H., H.N. Li and M. Gu, 2013. Experimental assessment of high-rate GPS receivers for deformation monitoring of bridge. Measurement, 46: 420-432.
CrossRefDirect Link - Yang, Y. and S. Nagarajaiah, 2014. Blind denoising of structural vibration responses with outliers via principal component pursuit. Struct. Control Health Monit., 21: 962-978.
CrossRefDirect Link - Yeh, T.K., B.F. Chao, C.S. Chen, C.H. Chen and Z.Y. Lee, 2012. Performance improvement of network based RTK GPS positioning in Taiwan. Surv. Rev., 44: 3-8.
CrossRefDirect Link
ahmed mousa Reply
Hello,
My name is ahme samir studing civil enginnerinI'min egypt and I'm doing a research about structure health monitoring and this article will help me alot.
Thanks.