
Bello.Y. Idi
Department of Geomatic Engineering, FKSG, Universiti Teknologi Malaysia, Malaysia
Md. N. Kamarudin
Institute of Geospatial Science and Technology, (INSTEG), Universiti Teknologi Malaysia, Malaysia
Asian Journal of Earth Sciences
Year: 2011 | Volume: 4 | Issue: 3 | Page No.: 193-202







ABSTRACT
A shallow subsurface survey was conducted along a 20 m long profile on a test site with the aim of mapping and assessing ground water resource of the area. The profile was scanned with ground penetrating radar using common offset geometric configuration. Velocity information obtained from the processed radar image were used to estimate and mapped the spatial distribution of the ground water within the shallow depth based on Topp’s empirical relation between the water content and the dielectric constant of the soil medium. Due to the absence of scattering objects within the deeper high water content region, borehole log data were used to correlate the radar reflection signatures with the observed stratigraphic sequences. Layer picking was used to delineate the water table which correlates well with the log data. Significant lateral variation in both the shallow water content and the level of water table were observed with the water table found to be within a depth range of 0.5 to 1.4 m. These were attributed to the nature of the soil identified as till with variable grain size distribution. The soil is therefore, considered to have great variation in hydraulic conductivity which implies significant variability in water retention capacity. Region of maximum water content within the shallow level was found to coincide with the region of higher level of the water table. The study therefore, appraised the effectiveness of GPR as a tool for precision agricultural practice and environmental studies.
PDF Abstract XML References Citation
Received: August 02, 2011;
Accepted: November 10, 2011;
Published: December 21, 2011
How to cite this article
Bello.Y. Idi and Md. N. Kamarudin, 2011. Ground Water Estimation and Water Table Detection with Ground Penetrating Radar. Asian Journal of Earth Sciences, 4: 193-202.
URL: https://scialert.net/abstract/?doi=ajes.2011.193.202
URL: https://scialert.net/abstract/?doi=ajes.2011.193.202
INTRODUCTION
Shallow subsurface hydrogeological survey is vital in various fields of studies. Near-surface underground water is an essential resource that is playing a vital role in supporting life. Studies on spatial variability of hydrogeological properties of shallow soil are therefore, very essential in fields such as agriculture, construction engineering, environmental studies etc. Soil hydrogeologic parameters such as water content and porosity are of primary importance as they determine the conditions of vital processes such as chemical infiltration, evaporation, subsurface pathways for nitrogen loss and movement of agrochemicals. Various techniques of mapping near surface hydrogeological properties of the subsurface have been on practice. These range from ground-based, aerial and satellite imagery (Devadas et al., 2011), microwave reflectometry (Ayalew et al., 2007), Time Domain Reflectometry (TDR) (Cannazza et al., 2009), electrical resistivity (Sirhan et al., 2011) etc.
The performance of Ground Penetrating Radar (GPR) in mapping hygrogeologic properties of soil is remarkably unique due to its relatively high spatial resolution, noninvasive and nondestructive nature and the rapidity of its field operation. Turesson (2006) described the advantage of GPR over other methods of soil water surveys as its vertical and lateral resolutions in high resistivity environment. GPR records continuous graphic profiles of the subsurface interfaces with high degree of accuracy. It is considered the most prepared method for shallow soil exploration in the upper few meters of the earth subsurface (Steeples, 2005). This unique feature enables it to develop extensively for variety of applications in many different fields including subsurface water content and near-surface geologic mappings. For instance GPR reflection travel time was used by Lunt et al. (2005) to estimate changes in soil water content under different range of soil saturation conditions. The technique was also used by Hamzah et al. (2009) to detect hydrocarbon contaminant in soil. High resolution 2- and 3-D GPR surveys were used by McClymont et al. (2010) to map the Alphine fault zones on the south Island of New Zealand with sufficient details.
Water content estimation with GPR is based on the relationship between the dielectric permittivity and water content of soil materials. Dielectric permittivity is a complex frequency-dependent electrical property of materials that is highly influenced by the presence of water because of the dipolar nature of the later. Ordinarily, soil is a complex mixture of sand, water, air and other dissolved cations. The dielectric permittivity of water within GPR frequency range is about 81 where as the dielectric permittivity of most rocks and soil materials within the same frequency range is between 4 and 7. The dielectric permittivity of air is 1 (Daniels, 2004). These imply that water content is a dominant factor in the effective dielectric permittivity value of soils.
Another factor that influences the hydrogeologic behavior of soil is the hydraulic conductivity. Hydraulic conductivity is partially a function of grain size. It is a major parameter that influences the fluid flow of an aquifer and determines the water retention capacity of soils which is also measured as coefficient of permeability. Fine sand, silt and clay soils for instance have higher water retention capacity owing to their high coefficient of permeability compared to coarse-grained sand and gravel. It is therefore, pertinent to take into consideration these two parameters in hydrogeological study of the subsurface.
In this study, we assessed the spatial distribution of water content of soil based on the variation in electromagnetic petrophysical properties of the subsurface medium. The spatial variation of the dielectric permittivity obtained from radar image and grain size distribution obtained from borehole core analysis were used to deduce the water content distributions across the subsurface. The unique amplitude pattern of water table reflection signature was used to detect the position of water table from the processed radargram. The work is a report of preliminary study aimed at assessing the performance of subsurface radar system in providing useful inputs that could lead to the development of spatial data bank for precision agricultural practice.
THEORETICAL FRAMEWORK
A parameter of primary importance in GPR exploration is the radar propagation velocity across the medium of investigation. A radar pulse transmitted through a homogeneous medium propagates with a unique characteristic velocity that defines the medium. Velocity information with respect to a particular subsurface structure can be used to estimate the layer thickness, dielectric constant, moisture content, porosity and to delineate discontinuities between different subsurface structures (Daniels, 2004).
Radar propagation velocity v is dependent on the relative dielectric permittivity of the material medium. Relative dielectric permittivity is the measure of the polarization or reorientation of the molecules of the medium due to the influence of the applied electric field. Within GRP frequency range, the real component of dielectric constant (dielectric permittivity) of a material εγ is given by (Grote et al., 2002):
| (1) |
where, C and v are the velocities of EM waves in free space and the material medium, respectively.
Water is one of the most polarizable materials and in most cases, water molecules on the earth materials are free except in few cases such as high clay content soils. Thus in the vicinity of an applied EM field, the dipole distribution of water molecules in soil effectively align within the applied field giving raise to higher magnitude of dielectric permittivity. Velocity information with respect to a soil medium could therefore, serve as diagnostic of water content of the medium.
Estimation of soil water content from GPR data is commonly based on empirical relationship between the dielectric constant and water content of soil. Various empirical relationships were developed mostly based on Time Domain Reflectometry (TDR) measurement. The most remarkable relationship however, is the Topp equation relating the water content θ of a soil and its apparent (measured) dielectric constant εγ (Topp et al., 1980) for soil of various textures given as:
| (2) |
The permittivity in this case is determined from the measure of the radar propagation velocity as given in Eq. 1. Topp’s equation is generally applicable to mineral soils as it is independent of soluble salt content and weakly independent of soil type and soil density. It can be used to estimate volumetric water content from zero to saturation with an error estimate of 0.013. The limitation of Topp equation is that organic and clay soils tend to deviate from it. This fact was described by Pumpanen and llvesniemi (2005) who state that the relationship between the dielectric constant and water content in organic soil is very different from that in mineral soil due to the differences in bulk density and surface area. Deviation of clay soil from Topp’s equation was attributed to some factors uniquely affecting the relationship between water content and dielectric permittivity of clay. These include among others: significantly high imaginary part of the relative permittivity of the soil and high content of bound water with lower relative permittivity than free water (Cosenza and Tabbagh, 2004). Thus application of the Topp’s empirical formula to clay-rich soil requires site specific calibration. The applicability of Topp equation is also frequency dependent as it is applicable only within a frequency range of 50-1000 MHZ (Annan, 2001). It is however, noted that the permittivity obtained from GPR data could be used to obtain reasonable information about the spatial variation of water content of the vadose zones based on the Topp’s relationship (Huisman et al., 2003).
Techniques of GPR radar velocity estimation with the Common Offset GPR configuration mode relies on the availability of the presence of point scattering objects which provide hyperbolic reflection signatures. Radar velocity relative to the medium above the reflector can be estimated by fitting the hyperbolic spread due to the reflector with a mathematical model associated with model velocity based on its characteristic parameters. Water table reflection signature could however, be detected in the radar image owing to the effect of high water content on the radar signal attenuation rate. Site specific soil characteristics must therefore, be taken into consideration in this case as the bases for the quantitative interpretation of the acquired radar image.
MATERIALS AND METHODS
Study area: The study area is a football pitch of Kolej 16, in the main campus of Universiti Teknologi Malaysia, Skudai, Johor Bahru, Malaysia (Fig. 1). The area is topographically flat low land within the low vegetation cover and is geologically within the Johor Baharu-Kulai map covered by sheet 130 map bulletin of the Geological Survey of Malaysia. According to the map, about 83% of the area’s topography is low land characterized by undulating topography with the steep land regions originated from the range of mountains within the area (Burton, 1973).
The compositions of soils in the entire Johor region are grouped according to their parent materials into different broad categories. According to the soil map of Johor the soil type covering the study area and the entire UTM is sedentary. This soil covers about 53% of the total land area in Johor. The soil can be classified under shallow (less than 50 cm), moderately deep (50-100 cm) and deep soil (more than 100 cm). The soils also occur on different terrain from the relatively flat areas (0-2%) to the hilly areas (>20%). Most of the industrial and food crops in Johor are grown on sedentary soils. The soil is developed from igneous, sedimentary or metamorphic rocks (Reed et al., 2000). Sedentary soil developed from igneous rocks are coarse-grained acidic granites with soil that is sandy in texture, weak in structure, low in nutrient level and nutrient-retaining capability. Sedentary soil developed from sedimentary and metamorphic rocks are shallow varying degree of lateritic formation and also have low level of nutrition. Low nutrient is associated with high resistivity since chemical composition of the nutrient will enhance the mobility of ions. Coarse-grain size is also associated with high resistivity except where the pores are filled with fluid.
 | |
| Fig. 1: | Study area showing the scanned profile and the borehole location |
Considering the fact that the area is almost entirely rain forest, it fears to assume that the soil is moderately conductive electrolytically.
According to the soil map, the soil type in the study area is made up of a mixture of coarse-grained acidic granites in form of gravel, sandy soil, silt and clay. Stratigraphic information drawn from a shallow borehole drilled close to the experimental site (Fig. 1) however, shows that the area consists of loam clay topsoil at a depth range of 0.2 to 0.4 m overlaying unconsolidated mixture of gravel, sand and silt with small intercalation of clay under high water content condition. Water table occurs at about 1.2 to 1.5 m depth range as observed from the borehole log. These soil types have variable water retention capacity based on their respective hydraulic conductivities. Gravel has the highest coefficient of hydraulic conductivity followed by sand (Kirsch and Yaramanci, 2009). Silk and clay on the other hand have minimal coefficient of permeability and therefore, have higher water retention capacity than gravel and sand. It is expected that in such a complex soil mixture, fluid flow will play a significant role is the soil layering and water content of the subsurface.
Data acquisition and processing: A common offset single fold reflection profiling was used to scan the subsurface over the 20 m profile and obtain the radar cross sectional image of the area. The data was acquired using an IDS DAD fast wave radar acquisition unit at a central frequency of 200 MHZ. A perpendicular polarized broadside antenna orientation was used for the field operation. Figure 2 shows the raw radar image obtained.
The acquired data image was processed with Reflex2D GPR/seismic processing software. Temporal filtering (dewow) was applied to remove very low frequency components from the image data associated with possible instrumentation dynamic range or inductive phenomena. Static correction was applied in order to time-shift the data record to first significant arrivals. A bandpass butterworth filter was applied in time domain recursively in order to suppress noises that differ in frequency content from the signal. Temporarily consistent noises were eliminated with background removal filter, a subtracting average filter that enhances signal’s visibility. Time gain was applied to compensate for the signal attenuation with depth. The processed radargram is shown in Fig. 3.
In this work, radar signal velocity through the soil medium was used to deduce useful information about the medium. For a common offset mode used for this work, hyperbolic fitting is the most appropriate technique of velocity estimation.
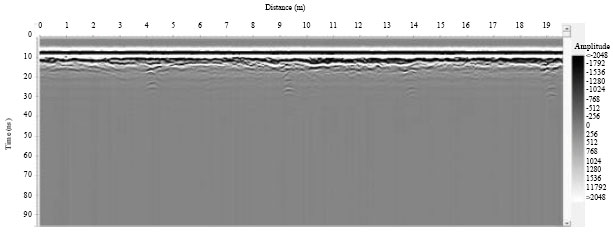 | |
| Fig. 2: | Raw radargram obtained |
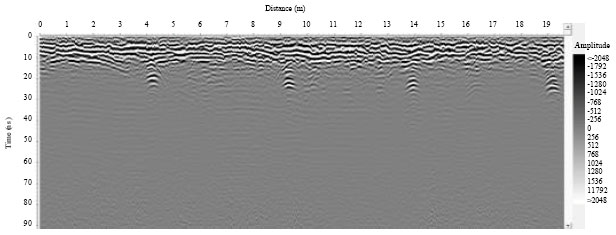 | |
| Fig. 3: | Processed unmigrated radargram |
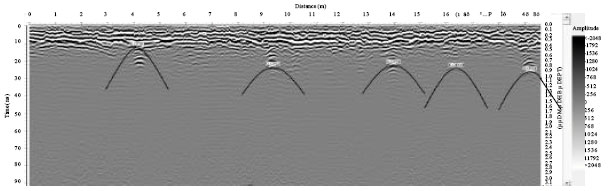 | |
| Fig. 4: | Curve fitting of hyperbolic reflection signature on an unmigrated radargram |
This involves the fitting of hyperbolic signature associated with a local target reflector. The shape of the hyperbola is determined by the magnitude of the velocity. In other word, the eccentricity of the hyperbola increases with velocity. (Shihab and Al-Nuaimy, 2005).
Reflection hyperbolas due to localized targets are discernible within few cm depths of the radargram due to the presence of few available scattering objects (Fig. 3). This enables radar velocity estimation based on the hyperbolic fitting. A model hyperbola was used to fit each identified hyperbola by adjusting the model velocity value. Figure 4 depicts the fit hyperbola used to obtain velocity estimates of the medium above the localized reflectors A mean velocity of 0.0682 m ns-1 was obtained and used to convert the time axis to depth axis. The velocities obtained were used to compute the dielectric permittivity of the medium relative to the given spatial location based on Eq. 1 and subsequently converted to volumetric water content using Eq. 2. It is however, difficult to determine the radar signal velocity with common offset method in a highly water saturated medium due to the absence of scattering objects. The limitation of the above mentioned technique in estimating the water content is clearly noticeable with the absence of diffracted hyperbolas at the deeper regions of the cross section. Hence, the hydrogeologic information obtained from the borehole is used in this case.
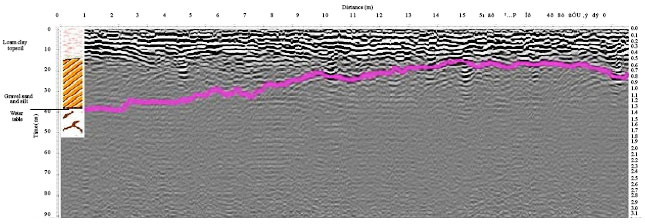 | |
| Fig. 5: | Picked layer correlated to the borehole log |
| Table 1: | Numerical values of radar velocities obtained from the hyperbolic fittings |
 | |
Because of the dominant role played by the presence of water in the effective dielectric permittivity and electrical conductivity values of soil, water table interface in the subsurface is detectable by virtue of significant contrast in the attenuation rate of the radar signal. The near homogenous nature and high signal attenuation rate of the subsurface water body lead to the development of unique continuous reflection signature at the water table interface. The strong signal horizon was therefore, detected using semi automatic layer picking mode in the reflex2D to extract the depth and topography of the water table interface. Comparison of the picked layer with the borehole data shows that the layer corresponds to the water table at the borehole location (Fig. 5).
RESULTS
Table 1 gives the numerical values of radar velocities obtained from the hyperbolic fittings of the few discernible hyperbolic signatures available in the radargram and their corresponding dielectric constants and the water content estimates.
Figure 6a is a cross sectional plot of the spatial distribution of water content obtained using the Topp equation to a maximum depth of 1 m. Higher water contents correspond to lower signal velocities were recorded at the eastern end of the profile.
In Fig. 6b, the water table topography is shown in a layer window (bottom), indication the variation in the depth to water level. Thus the water table appears as continuous undulating semi horizontal layer that varies spatially with depth across the profile. The depth variation fairly agrees with the top equation estimate with the region of higher water content in Fig. 6a correspond the region of shallower water table.
 | |
| Fig. 6(a-b): | (a), cross sectional plot of the spatial distribution of water content within 1 m depth of the study area.(b), depth of water table detected with semi automatic layer picking |
DISCUSSION
Although, the study area is located in a high rainfall region with a mean annual rainfall of about 1778 mm, the subsurface water content above the water table is relatively moderate with a mean value of 0.3402. This could be attributed to the petrophysical properties specifically the hydraulic conductivity of the soil. Hydraulic conductivity is partially a function of grain size and therefore, determines the fluid flow of aquifer. The site-specific borehole core data obtained from the surface to the water table revealed that the dominant soil composition is a mixture of coarse-grained gravel and sand of varying grain size mixed with small amount of silt and clay. The deposits generally looked unconsolidated without clearly defined layering. These imply that the subsurface can as well be described as till soil due to high degree of grain size variability. In such soil formation, the fined silt and clay contents fill the pore space thereby reducing the porosity of the mixture (Kirsch, 2009). Increase in clay content could therefore, result in decrease in porosity of the soil matrix. This could be responsible for the variation in lateral distribution of water and the undulating nature of the water table surface.
The water content distribution in this kind of soil formation is therefore, strongly dependent on the petrophysical properties of the soil specifically the porosity which is a factor of grain size. For instance in a region of higher clay content, high water content is likely to coincide with low porosity. On the other hand, relatively higher levels of porosity and water content are likely to coincide at water saturated zones since at saturation, permittivity (and therefore, water content) increase with increasing porosity (Kirsch, 2009). Regions of low water content at the centre of the profile (Fig. 5) are therefore, considered as regions with coarse-grained sands associated with low water retention capacity. Thus water content-porosity relationship depends on the site specific soil characteristics.
In other word, it is based on the relationship between soil texture and water content which is confirmed to be more significant near saturation (Grote et al., 2010).
It could be observed that the region of higher the ground water body below the water table coincides with low signal activity compared to the region above it. This explains the fact that moisture content enhances electrical conductivity thereby attenuating the signal amplitude. The finding is therefore, in line with the idea of the possibility of utilizing the distribution of maximum amplitude of radar image as indicator for expected soil water content (Schmalz and Lennartz, 2002).
CONCLUSION
In this study, GPR radargram acquired using common offset scanning geometry was used to estimate near-surface water content of soil. The radar signal velocity obtained from the few discernible hyperbolic signatures due to point scatterers were used to compute the dielectric permittivity of the subsurface which are then converted to water content. Due to the obviously known limitation of common offset configuration in radar velocity estimation, site specific data was obtained from a drilled shallow borehole along the scanned profile to a water table depth. The borehole log was correlated to the processed radargram a picked horizontal reflection layer coincide with the water level on the log data. The results show that the water table is continuous and slightly undulated. Comparison of the water content estimated with the obtained radar velocity using Topp equation with the picked water table interface shows that region of higher water content obtained coincides fairly with the shallow region of water table. Variability in the level of water table was attributed to the great variability in the grain size distribution as observed in the log data.
ACKNOWLEDGMENT
The authors acknowledged with thanks the contribution of Jurukur Abadi of No. 06-01, Jalan Padi Emas 4/5, Pusat Bandar Tampoi, 81200, Johor Bahru for the test data acquisition.
REFERENCES
- Ayalew, G., N.M. Holden and S.M. Ward, 2007. Microwave dielectric properties of horticultural peat products. Mires Peat, 2: 1-10.
Direct Link - Cannazza, G., A. Cataldo, E. De Benedetto and E. Piuzzi, 2009. An innovative method for TDR measurement of static electrical conductivity in granular materials. Proceedings of the IEEE Instrumentation and Measurement Technology Conference, May 5-7, 2009, Singapore, pp: 197-200.
CrossRef - Cosenza P. and A. Tabbagh, 2004. Electromagnetic determination of clay water content: Role of the microporosity. Applied Clay Sci., 26: 21-36.
CrossRef - Grote, K., S. Hubbard and Y. Rubin, 2002. GPR monitoring of volumetric water content in soils applied to highway construction and maintenance. Lead. Edge, 21: 482-485.
CrossRef - Grote, K., C. Anger, B. Kelly, S. Hubbard and Y. Rubin, 2010. Characterization of soil water content variability and soil texture using GPR ground wave techniques. J. Environ. Eng. Geophys., 15: 93-110.
Direct Link - Hamzah, U., M.A. Ismail and A.R. Samsudin, 2009. Geoelectrical resistivity and ground penetrating radar techniques in the study of hydrocarbon-contaminated soil. Sains Malaysiana, 38: 305-311.
Direct Link - Lunt, I.A., S.S. Hubbard and Y. Rubin, 2005. Soil moisture content estimation using ground-penetrating radar reflection data. J. Hydrol., 307: 254-269.
Direct Link - McClymont, A.F., A.G. Green, A. Kaiser, H. Horstmeyer and R. Langridge, 2010. Shallow fault segmentation of the Alpine fault zone, New Zealand revealed from 2- and 3-D GPR surveying. J. Applied Geophys., 70: 343-354.
CrossRef - Pumpanen, J. and H. Ilvesniemi, 2005. Calibration of time domain reflectometry for forest soil humus layers. Boreal Environ. Res., 10: 589-595.
Direct Link - Schmalz, B. and B. Lennartz, 2002. Analyses of soil water content variations and GPR attribute distributions. J. Hydrol., 267: 217-226.
CrossRef - Shihab, S. and W. Al-Nuaimy, 2005. Radius estimation for cylindrical objects detected by ground penetrating radar. Sens. Imag. Int. J., 6: 151-166.
CrossRef - Sirhan, A., M. Hamidi and P. Andrieux, 2011. Electrical resistivity tomography, an assessment tool for water resource: Case study of Al-Aroub Basin, West Bank, Palestine. Asian J. Earth Sci., 4: 38-45.
CrossRefDirect Link - Topp, G.C., J.L. Davis and A.P. Annan, 1980. Electromagnetic determination of soil water content: Measurements in coaxial transmission lines. Water Resour. Res., 16: 574-582.
CrossRefDirect Link - Turesson, A., 2006. Water content and porosity estimated from ground-penetrating radar and resistivity. J. Applied Geophys., 58: 99-111.
CrossRef