
A. Fereidunian
Control and Intelligent Processing Center of Excellence, School of ECE, University of Tehran, 14395-515, Iran
M.A. Zamani
Control and Intelligent Processing Center of Excellence, School of ECE, University of Tehran, 14395-515, Iran
H. Lesani
Control and Intelligent Processing Center of Excellence, School of ECE, University of Tehran, 14395-515, Iran
C. Lucas
Control and Intelligent Processing Center of Excellence, School of ECE, University of Tehran, 14395-515, Iran
M. Lehtonen
Power Systems and High Voltage Laboratory, Helsinki University of Technology, FI-02015 HUT, Finland
Journal of Applied Sciences
Year: 2009 | Volume: 9 | Issue: 8 | Page No.: 1524-1530







ABSTRACT
Earlier we introduced a novel framework for implementation of Adaptive Autonomy (AA). This study presents an expert system realization of the AA framework, referred to as Adaptive Autonomy Expert System (AAES). The proposed AAES is based on the extracted rules from the Expert’s Judgment on proper Levels of Automation (LOA) for various environmental conditions, modeled as Performance Shaping Factors (PSFs). Decision fusion method is used as expert system inference engine, where eight decision fusion methods are developed as prospective ones. The AAES is realized in the practical case of electric power Utility Management Automation (UMA) for the Greater Tehran Electricity Distribution Company (GTEDC). The practical list of PSFs and the judgments of GTEDC’s experts are used as the expert system rule base in this research. The results of implementing the proposed AAES to GTEDC’s network are evaluated according to two criteria: average error and error margin. Five out of eight decision fusion methods are proven to be suitable inference engines, due to both criteria. Evaluation of the results shows that the proposed AAES can estimate proper LOAs for GTEDC’s UMA system, which change due to the changes in PSFs; thus providing a dynamic (adaptive) LOA scheme for UMA.
PDF Abstract XML References Citation
How to cite this article
A. Fereidunian, M.A. Zamani, H. Lesani, C. Lucas and M. Lehtonen, 2009. An Expert System Realization of Adaptive Autonomy in Electric Utility
Management Automation. Journal of Applied Sciences, 9: 1524-1530.
DOI: 10.3923/jas.2009.1524.1530
URL: https://scialert.net/abstract/?doi=jas.2009.1524.1530
DOI: 10.3923/jas.2009.1524.1530
URL: https://scialert.net/abstract/?doi=jas.2009.1524.1530
INTRODUCTION
Expert systems are information systems that emulate judgments of experienced experts in a particular field. Therefore, they can be used to solve problems associated with Complex Adaptive Systems (CASs) that ordinarily require human expertise (Turban, 1992).
Electric power plays a vital role in modern civil life (Ghaderi et al., 2006). Continuity of service is the main goal of electric power utility companies; therefore, they need to be rapidly recovered in contingency situations. This is performed by Utility Management Automation (UMA) system, in which, human experts and automated systems work collaboratively. This collaboration needs to be harmonized, to achieve a best-fit allocation of functions.
Human-Automation Interaction (HAI) has been studied for more than a half century (Parasuraman and Wickens, 2008). A static list was introduced by Fitts in 1956, to allocate functions between human and automation, referred to as MABA-MABA (Men Are Better At …-Machines Are Better At …) (Parasuraman et al., 2000). To overcome the shortages of Fitts’ two-degree (manual or automate) automation policy, Sheridan and Verplank suggested a ten-degree levels of automation (LOA) in 1978 (Parasuraman et al., 2000). Parasuraman et al. (2000), Endsley et al. (2003), Itoh and Inagaki (2004), Endsley and Kaber (1999) Kaber et al. (2005) and Fereidunian et al. (2007a, 2008) developed the LOA idea, introduced more sophisticated HAI models or implemented the existing models.
Human-automation systems performance is affected by environmental conditions; therefore, the fixed determination of LOA fails to maintain full advantages of the basic idea of LOA. As a result, the LOA should be adapted to the environmental conditions. This adaptation necessity, paves the way toward more advanced HAI approaches, referred to as adaptive automation (Parasuraman et al., 2000; Kaber et al., 2005), adjustable automation (Bradshaw et al., 2003), or Adaptive Autonomy (AA) (Fereidunian et al., 2007b, 2008). Figure 1 shows a chronological illustration of the conceptual development of HAI.
Despite the considerable significance of AA in literature, most implementation reports of AA are only within few high-tech industries such as aerospace, aviation and military. While, many safety-critical civil infrastructure systems like electric power utility industry (as good instances of CASs (Samad and Weyrauch, 2000)) are fertile grounds for implementations of the AA notion. Consisting complex entities of humans and automation systems, the AA approach to HAI can be regarded as a CAS issue. Consequently, expert systems are ideal solutions for realization of AA for HAI systems.
This research group presented a general, yet practical, framework for implementation of AA in Fereidunian et al. (2008), applying experts’ judgment concept to tackle the complex issue of human reliability assessment. In the proposed framework, the LOA of UMA was determined adaptively as a function of environmental conditions, represented as Performance Shaping Factors (PSFs) (Rosqvist, 2003).
This study, as a continuum of Fereidunian et al. (2008) introduces an expert system methodology for realization of our proposed AA framework, by developing mathematical models based on decision fusion approach. This research advances the premise that the proposed AA expert system can track a human expert judgment on determination of the best-fit LOA. The proposed AAES uses the judgments of GTEDC’s experts on proper LOAs for changing environmental conditions (PSFs) as the expert system rule base.
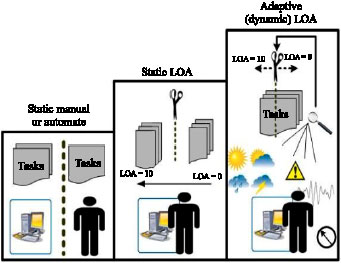 | |
| Fig. 1: | Development of the Human-Automation Interaction (HAI) in the literature from left to right: Fitts’ list (fixed manual or automatic function allocation), Fixed Level of Automation (LOA) (fixed ten-level LOA) and Adaptive LOA (AA or dynamic LOA) |
Furthermore, the AAES utilizes decision fusion method as the expert system inference engine. This study presents the first practical implementation of the LOA-TOA model of Parasuraman et al. (2000) using the AA implementation framework of Fereidunian et al. (2008) in a real power distribution automation case (UMA-FRF in GTEDC) for the first time, to the best of our knowledge, according to the Science Citation Index® and the IEEEXplore®. It can also be regarded as one of the first application reports of LOA-TOA model in the civil services, except to the aviation and cruise control.
MATERIALS AND METHODS
This research is a continuation of Fereidunian et al. (2008), which had been initiated at Helsinki University of Technology, Finland in 2005-2006 academic year. The rough ideas developed there were expanded and represented as quantitative models in University of Tehran, Iran from 2006 to 2008. The practical data (such as the practical list of PSFs and Experts’ Judgments interviews) were obtained from the GTEDC in 2006 and 2007. This paper presents an expert system realization for the general framework of Fereidunian et al. (2008) for AA implementation.
Expert systems have many applications in electric power systems. Utility Management Automation (UMA) system is a sort of Supervisory Control and Data Acquisition (SCADA) system for the electric utility system. In this study, an expert system (referred to as AAES) is used to adapt the autonomy level (LOA) of the UMA system to the changes in environmental conditions (PSFs), as shown in Fig. 2.
 | |
| Fig. 2: | Position of Adaptive Autonomy Expert System (AAES) in the utility management automation total system |
When one of the PSFs (Table 1) change, the AAES expert system recommend a new LOA for the UMA system, using its fusion-equipped inference engine, based on its rule-base provided by experts’ judgments. Briefly, the AAES acts as a controller for UMA system: it controls the LOA of the UMA system.
The AAES is implemented to one of the power distribution automation functions, known as feeder reconfiguration of utility management automation (UMA-FRF: Utility Management Automation, Feeder Reconfiguration Function). The UMA-FRF system (Fereidunian et al., 2002) restores the network after occurrence of faults, by reconfiguring the power distribution system. Figure 2 shows the proposed expert system role in relation with other sub-systems of UMA. The dashed arrow from the UMA conveys the environmental conditions (PSFs) to the AAES; where, the other arrow commands the LOA that is recommended by AAES to the UMA.
This study uses an extended version of the original HAI model of Parasuraman et al. (2000) introduced by Fereidunian et al. (2007a) having a 1* level added to the original model. The definitions of the LOAs, TOAs and HAI model can be found in the Table 2, as well as in (Parasuraman et al., 2000; Fereidunian et al., 2007a, b; Endsley and Kaber, 1999).
The environmental conditions are represented by the PSFs vector (Fereidunian et al., 2007a, 2008). The practical list of PSFs was obtained from the GTEDC. The vector X = {x1, x2, …, x10} is a binary vector, depicting the instantaneous PSFs for the UMA. Elements of X are defined in Table 1.
The proper values of LOA are judged by the GTEDC’s experts for specific situations (denoted here, as single-one PSFs), by filling in-person interview questionnaires. The single-one PSFs can be written as: [1, 0,…, 0], [0, 1,…, 0], …, [0, 0,…, 1]; where, their relevant LOAs can be represented as L1, L2, …, L10.
The proposed AAES fuses (i.e., combines or aggregates) the recommended LOAs for single-one PSFs (i.e., Li s), in order to determine the proper LOA for other situations. According to a comprehensive study on various sorts of fusion methods in the relevant literature ((Daniels et al., 2001; Sinha et al., 2006; Alexandre et al., 2001; Bloch, 1996), we made the following methods candidate for our expert system purpose: Linear Fusion, Product Fusion, Compromised Fusion, Minimum and Maximum. A summary of the five prospective fusion methods, which is customized and derived for our specific case, is as follows:
| Table 1: | Practical list of PSFs for UMA-FRF system |
 | |
| Table 2: | Definitions of the LOAs, according to (Parasuraman et al., 2000; Fereidunian et al., 2007a) |
 | |
| • | Linear fusion can be written in our case as: |
(1) |
where, LOA(X) is the overall LOA value of X, round operator rounds the calculations to the nearest LOA, xi is the PSF i, Li is the recommended LOA for xi, wi is the xi corresponding weight and n is the number of PSFs.
| • | Product Fusion as follows: |
(2) |
| • | The Compromised fusion as, r = 2, 3, 4, 5: |
 | (3) |
where, r is scaling factor.
| • | The Minimum method (voting/ranking method) as: |
(4) |
| • | The Maximum method (voting/ranking method) as: |
(5) |
The eight candidate fusion methods were subsequently used as the core computational instruments of the AAES, i.e., as the expert system inference engine.
RESULTS AND DISCUSSION
The results of the implementation of the eight candidate fusion methods to the AAES for UMA-FRF case, as well as evaluation and comparison of the methods are presented here. Here, the prospective fusion methods (as AAES inference engines) are evaluated using two criteria: average errors and error margin graphs.
First, the AAES inference engines (fusion methods) are evaluated using average errors. Since the main duty of an expert system is to behave like a human (Ng, 2003); hence, the proposed fusion methods should be evaluated against superior human experts, whose recommended LOAs are indicated by LOAjRef. The Superior Experts are experts, whose superiority (in higher and more reliable expertise) has been verified according to the consistency of their expert judgments interview questionnaire.
The method error can be defied as:
(6) |
where, Error is average error of a method, LOAjAAES is the calculated LOA for sample j of the PSFs by AAESs, LOAjRef is the recommended LOA by superior expert (as reference value) in sample j of PSFs and m is total number of PSF samples. Since X includes ten binary elements, it can take 210 = 1024 sample at most. However, only 324 samples are practically feasible ones for each proposed method.
Figure 3 shows average errors for all of the proposed decision fusion methods. The results show that all of the proposed fusion methods are within the acceptable range, expect to the Minimum method (Fig. 3). As depicted in Fig. 3, Linear, Product, Compromised (for r taking 2, 3, 4, 5) and Maximum fusion methods calculate the LOA with less than 0.5 average error, however, Minimum fusion method exceeds the 0.5 error value. Since the outputs of the AAES are LOAs (which take integer values from 0 to 10) the average errors less than 0.5 show reasonably tolerable error for the AAES.
Second evaluation criterion is error margin graphs in Fig. 4. This study also evaluates the proposed fusion methods (AAES inference engines) by comparing the calculated LOA with the superior expert’s recommended LOA, as shown in Fig. 4. The calculated LOAs are the best-fit LOA, in accordance with the superior expert’s judgment, if they appear on the dashed line. The two margin lines show maximum deviations from the best-fit LOA. In the worst case, Linear, Product, Compromised (for r = 2, 3, 4) calculate only one level away from the superior expert’s judgment; while, the Minimum, Maximum and Compromised (for r = 5) determine two levels away from the superior expert’s judgment.
Shortly, eight decision fusion methods proposed to realize the AAES and the AAES expert system was benchmarked by a superior expert. The benchmarking process was performed by two evaluation criteria: average error and margins error.
Since LOAs include integer values, less than 0.5 average error indicates that in average the calculated LOA (LOAAAES) are near to recommended LOA (LOARef), thus they are far from the neighbors of recommended LOA (LOARef ±1); hence, average tolerable error range is less than 0.5, as indicated in Fig. 5. The tolerable error margin is at most 1. The benchmarking results express the five methods of the eight proposed methods satisfy both criteria. The five suitable methods for this case study are Linear, Product, Compromised (for r = 2, 3, 4).
 | |
| Fig. 3: | Average error graph for the candidate decision fusion methods |
 | |
| Fig. 4: | The recommended LOA verses calculated LOA. (a) Linear, Compromised r = 2, 3, 4, (b) Product, (c) Minimum and (d) Maximum and Compromised r = 5, - - ■ - - Calculated LOA = Recommended LOA, —■— Calculated LOA ≠ Recommended LOA, the most distant |
 | |
| Fig. 5: | Average error and error margin tolerable value |
CONCLUSION
An expert system was introduced for realization of AA framework of Fereidunian et al. (2008), referred to as AAES. The presented AAES adapts the LOA of UMA-FRF (or generally, HAI system) to the environmental conditions. The judgments of the GTEDC’s experts were deployed as the expert system rule base and decision fusion method was utilized as inference engine, to generalize the experts’ judgment rule-base to new instances.
Eight decision fusion methods were considered as prospective inference engines; subsequently, they were evaluated by two criteria: average errors and error margin graphs. Consequently, five out of eight decision fusion methods were qualified as proper inference engines, according to the evaluation process.
Both evaluations show that the proposed expert system (AAES) tracks a human expert’s judgment in LOA determination, while changing the environmental conditions.
This study continues on more theoretical work on the HAI models, implementation of the implementation of proposed method in other developmental environments.
ACKNOWLEDGMENTS
This research has been supported in part by the Islamic Development Bank (IDB) Merit Scholarship (Grant No. 36-1-411) at the University of Tehran, the CIMO (Finland) Scholarship (Grant No. TM-04-2865) at the Helsinki University of Technology and the British Council Partial Scholarship (UK, funded by shell Development Iran) at the Imperial College London for A. Fereidunian, each one in a distinct period of time, which is thankfully acknowledged. Moreover, useful discussions and comments of Prof. U. Pulkkinen of VTT, Espoo, Finland and Professor T.C. Green of CAP Research Group, Imperial College London, UK are thankfully appreciated. The authors thank to the anonymous reviewers of Journal of Applied Sciences for their comments, which improved the quality of this research. The authors thank to the Greater Tehran Electricity Distribution Company (GTEDC), especially to Mr Habib Torabi (GTEDC’s Deputy CEO) and Mr Payam Kharazmi (Senior Engineer in GTEDC), as well as GTEDC’s SCADA experts for their cooperation, useful suggestions and their patience during AA questionnaire interviews. Authors would also like to thank to Mrs. Bahar Fattah for her help in questionnaire interviews with the GTEDC’s experts.
REFERENCES
- Alexandre, L.A., A.C. Campilho and M. Kamel, 2001. On combining classifiers using sum and product rules. Pattern Recognit. Lett., 22: 1283-1289.
CrossRefDirect Link - Bloch, I., 1996. Information combination operators for data fusion: A comparative review with classification. IEEE Trans. SMC-A, 26: 52-67.
CrossRefDirect Link - Daniels, J., P.W. Werner and A.T. Bahill, 2001. Quantitative methods for tradeoff analyses. Syst. Eng., 4: 190-212.
Direct Link - Fereidunian, A., C. Lucas, H. Lesani, M. Lehtonen and M.M. Nordman, 2007. Challenges in implementation of the human-automation interaction models. Proceedings of the Mediterranean Conference on Control and Automation, June 27-29, 2007, Athens, Greece, pp: 1-6.
CrossRefDirect Link - Fereidunian, A., M. Lehtonen, H. Lesani, C. Lucas and M.M. Nordman, 2007. Adaptive autonomy: Smart cooperative systems and cybernetics for more humane automation solutions. Proceeding of the Internatonal Conference on Systems, Man and Cybernetics, October 7-10, 2007, Montreal, Canada, pp: 202-207.
CrossRefDirect Link - Fereidunian, A., H. Lesani and C. Lucas, 2002. Distribution system reconfiguration using pattern recognizer neural networks. IJE. Trans. B: Appl., 15: 135-144.
Direct Link - Fereidunian, A., H. Lesani, C. Lucas and M. Lehtonen, 2008. A framework for implementation of adaptive autonomy for intelligent electronic devices. J. Applied Sci., 8: 3721-3726.
CrossRefDirect Link - Ghaderi, S.F., M.A. Azadeh and S. Mohammadzadeh, 2006. Relationship between value added and electricity consumption in the Iranian industries. J. Applied Sci., 6: 387-390.
CrossRefDirect Link - Kaber, D.B., M.C. Wright, L.J. Prinzel and M.P. Clamann, 2005. Adaptive automation of human-machine systems information processing functions. Human Factors, 47: 730-741.
CrossRefPubMedDirect Link - Parasuraman, R., T.B. Sheridan and C.D. Wickens, 2000. A model for types and levels of human interaction with automation. IEEE Trans. Syst. Man Cybernetics, Part A: Syst. Hum., 30: 286-297.
CrossRefPubMedDirect Link - Parasuraman, R. and C.D. Wickens, 2008. Humans: Still vital after all these years of automation. Human Factors, 50: 511-520.
CrossRefDirect Link - Sinha, A., H. Chen, D.G. Danu, T. Kirubarajan and M. Farooq, 2006. Estimation and Decision Fusion: A Survey. Proceedings of the International Conference on Engineering of Intelligent Systems, April 22-23, 2006, Islamabad, Pakistan, pp: 1-6.
Direct Link - Itoh, M. and T. Inagaki, 2004. A micro world approach to identifying issues of human-automation systems design for supporting operator`s situation awareness. Int. J. Human Comput. Interac, 17: 3-24.
CrossRef