
Mohammed S. Zahrani
King Faisal University, College of Computer Sciences and Information Technology, Saudi Arabia
Khaled Ragab
King Faisal University, College of Computer Sciences and Information Technology, Saudi Arabia
Asrar Ul Haque
King Faisal University, College of Computer Sciences and Information Technology, Saudi Arabia
Asian Journal of Applied Sciences
Year: 2011 | Volume: 4 | Issue: 4 | Page No.: 362-377







ABSTRACT
Hundreds of Camel-Vehicle accidents are reported every year causing numerous deaths and loss of property running into millions of Saudi Riyals. Ministry of Transport of the Kingdom spends billions of Saudi Riyals to deal with this problem by building fences along the highways which costly, difficult to maintain and isolate the camel habitat. To address this problem, a deployable and intelligent Camel-Vehicle Accident Avoidance System (CVAAS) was designed using global positioning system (GPS) technology. This paper conducted a survey of the developed animal detection and warning systems. It provided recent and numerous reviews of the worldwide technologies which are being used to reduce animal-vehicle collisions. Also, this paper introduced the design of the Camel-Vehicle Accident Avoidance System (CVAAS) in the Kingdom of Saudi Arabia. The CVAAS project took a first comprehensive step towards a system that will help detect camels on the highway and warn drivers as well. The innovative findings of this study is the careful and intelligent use of the GPS to detect the camel position, direction and movement. Moreover, CVAAS identified the dangerous zones that enables the warning system to adapt the alarming period. The CVAAS can be classified as an Intelligent Transportation System (ITS). The use of GPS technology in this kind of application is a novel idea. This proposal can be recognized as a world leader in using GPS for avoiding animal-vehicle collision. The research highlighted the advantages of CVAAS to save human lives as well as camels in such accidents and save billions of Saudi Riyal.
PDF Abstract XML References Citation
Received: August 13, 2010;
Accepted: November 23, 2010;
Published: February 22, 2011
How to cite this article
Mohammed S. Zahrani, Khaled Ragab and Asrar Ul Haque, 2011. Design of GPS-Based System to Avoid Camel-Vehicle Collisions: A Review. Asian Journal of Applied Sciences, 4: 362-377.
DOI: 10.3923/ajaps.2011.362.377
URL: https://scialert.net/abstract/?doi=ajaps.2011.362.377
DOI: 10.3923/ajaps.2011.362.377
URL: https://scialert.net/abstract/?doi=ajaps.2011.362.377
INTRODUCTION
Hundreds of Camel-Vehicle accidents are reported every year causing numerous deaths and loss of property running into billions of Saudi Riyals. Al-Ghamdi and Al-Gadhi (2004) summarized traffic accident data and reported that more than 600 camel-vehicle accidents occur annually. Usually camels found near the highway are domestic camels because the owners like to live close to highway for transportation facility. These camels move across highways looking for water and food and during mating season. Camels are very hard to detect by vehicle drivers especially during the night and results in severe accidents. Presently, in Saudi Arabia, there is no warning system installed for the vehicle drivers to slow down when there is a camel on or near the highway.
Currently fences are used to stop camels from coming on the highways. Fences are expensive to install and difficult to maintain. Also, these fences divide the camel habitat and isolate camel populations. Furthermore, it is known that camel owners create holes in the fences to allow camels to across them. This kind of behavior literally nullifies the effect of fences and leads to accidents. Therefore, a warning system is needed to inform the vehicle drivers when a camel is on or near the highway so that drivers can respond by slowing down and avoiding accidents (Al-Ghamdi and Al-Gadhi, 2004).
Many kinds of animal detection and warning systems are used around the world to indicate presence of animals on highways to avoid accidents. Animal detection systems are divided into three main categories namely Road-based, Vehicle-based and Animal-based. The use of such animal detection and warning systems has shown to reduce the number of accidents. However, such systems have various drawbacks including generating false detections. The main objective of this research was to design, simulate and deploy a Camel-Vehicle Accident Avoidance System (CVAAS) using global positioning system (GPS) technology. The GPS is a free service which provides exact geo-location (accuracy <3 m) of a GPS receiver by the use of a network of 24 satellites. The use of GPS receivers has increased tremendously for navigation purpose and in tracking animals (Macklean, 2009; Rutter, 2007; Turner et al., 2001), in sensors networks and many other applications. The GPS receiver can be obtained for a reasonable price of around 80-200 SAR. GPS devices can be integrated with Geographic Information System (GIS) software packages for further programming and developing applications such as CVAAS. The use of GPS is a novel as well as feasible solution to develop an animal detection and warning system.
The CVAAS system is an animal-based system which primarily makes use of a programmable GPS receiver and a warning system. The system will identify the presence of a camel on or near the highway and then the programmable GPS device will send out a signal to the Dedicated Short-Range Communication (DSRC) transmitter. Consequently, the DSRC transmitter forwards the camel position to a DSRC receiver mounted on a warning system. The signal will activate the warning system to warn the vehicle drivers to slow down in order to avoid collision with the camel. Figure 1 illustrates such a scenario.
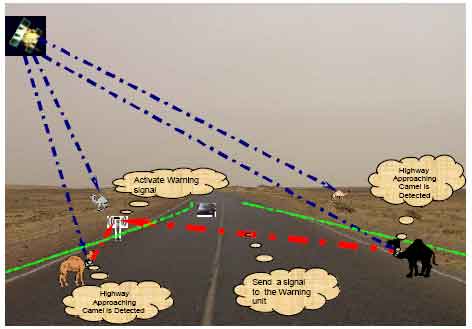 | |
| Fig. 1: | The Warning System being Activated as Camels approach the Highway |
In Saudi Arabia, motor vehicles are the most common mode of transportation with comparatively good roads passing through extensive deserts.
Arabian camels having one hump, also known as dromedaries, is the traditional animal of the desert. They can be over 2.1 m tall at the hump and weigh up to 726 kg (National Geographic, 2009). The humps storing up to 36 kg of fat give camels their ability to travel as far as 161 desert kilometers without water. Camels are capable of losing 40% of its body's weight before becoming distressed, they are able to go five to seven days before having to drink (Harris, 2005). Al-Amr et al. (1998) found that camel have very strong sense of smell which they use to locate water from a distance of 2.5 km and recognize another camel from 11 km. They can move 50 to 60 km looking for food. They can travel as long as 20 days to return to their places. A female camel has a strong emotion to go back to her birth place along with her calves. The pregnancy in female camels lasts 390 days in the one-humped camel (FAO, Animal Health Manual, 1994). They can run at up to 65 km h-1 in short bursts and sustain speeds of up to 40 km h-1. Studies conducted in Australia showed that camels have tendency to race with a car when they see one (Al-Amr et al., 1998). The camel is the traditional animal of the desert and the camel population increases continuously. For example the number of camels in UAE increased from 100,000 to 250,000 in the last 40 years (David, 2007). More than half a million camels move freely in Saudi Arabia (Al-Ghamdi and Al-Gadhi 2004). Around Riyadh and Qassim area, the density of camels concentration per square km was reported 0.4 and 0.6 camels (FAO, 2004). Al-Hazmi and Al-Bar (1999) reported that the density of camels along the highways in western areas in Saudi Arabia is 12 Camels/Kilometer. Because of their instinct behavior, camels travel long distances and cross a number of rural highways for food and water. Therefore, collisions with camels are more prominent (Al-Sebai and Al-Zahrani, 1997; Ansari and Ashraf, 1998). The rate of accidents is higher during nights as camels that stay in the desert, mostly unsupervised, move around in herds, often coming on to the roads without warning. There are no designated crossing points for the camels and the fences erected in various places is often mutilated by camel owners to enable the camels to cross over (Ansari and Ashraf, 1998). Camels usually move as a herd on the road and this will give no space or chance for the driver to avoid the collision. They reviewed 140 patients with low cervical spinal cord injuries in the Riyadh Armed Forces Hospital. Motor vehicle accidents constituted 119 (85%) of the patients while the camel collisions were a major cause of vehicle accidents 39 (33%), as reported by Ansari and Ashraf (1998).
According to the study of Al-Ghamdi and Al-Gadhi (2004), the most frequently involved animal in AVC’s is camel; it is estimated that 97% of all reported AVC’s were camel related. More than 90% of these accidents occur at night, between dusk and dawn (Al-Amr et al., 1998). These accidents cause a lot of damage to the environment, economy and social life such as significant economic loss, human injuries and/or fatalities, loss of valuable wildlife and damage to properties (Fig. 2). Al-Ghamdi and Al-Gadhi (2004) studied the incidents of camel-crossing related accidents on Saudi rural roads to develop techniques to deal with the problem. In the study, seven camel-crossing warning signs were used to find out if they were effective in reducing the number of camel-vehicle collisions. The measure of effectiveness utilized the reduction in speed of the motorists passing by the signs. Although the signs brought about reductions in speed, they were relatively ineffective with drivers slowing down by only three to seven kilometers per hour, the study showed.
The AVC is not only a traffic problem in Saudi Arabia but also considered a major safety problem in USA, Japan and Europe (Bruinderink and Hazebroek, 1996; Stout et al., 1993). In Europe, excluding Russia, an estimated 507,000 ungulate-vehicle accidents occur annually (Bruinderink and Hazebroek, 1996).
 | |
| Fig. 2: | Camel-Vehicle accident |
The number of AVC’s continually increased during the last 30 years with the increase in traffic volumes, vehicle speed and animal populations. In 1980 approximately 200,000 deer were killed on U.S. highways in deer-vehicle collisions (DVC’s) and by 1991 the total number of deer killed as a result of deer-vehicle collisions were 538,000 based on collision data from only 36 states. Currently, It is estimated that approximately 726,000 deer-vehicle accidents occur annually in the U.S. (Danielson et al., 1998). In 1998, an estimate of approximately 13,500 DVC’s occurred in Iowa alone (23% increase in 3 years) resulting in an annual total damage of more than $ 10 million in personal injury and property damage to Iowa vehicles.
In the United States, considerable interest has been generated preventing AVC’s due to the fact that over a billion dollars worth of vehicle damage annually (Hedlund et al., 2004). It has been noted that the large proportion of hospitalization crashes (44.8%) found involving drivers trying to avoid an animal, resulting in the vehicle leaving the road, hitting a tree, pole, fence, or rolling over (Conn et al., 2004). Langley et al. (2006) examined the risk factors involved with fatal AVC’s in the United States from 1995 to 2004 and found that 89.5% occurred on rural roads, 64.8% in darkness, 85.4% on straight sections of road, 91.1% occurred in dry weather conditions and 28% of the victims were motorcyclists. A large proportion of injuries from AVC’s in the United States involve deer (Sullivan et al., 2004). Similarly, in Europe and Canada moose and deer have been shown to be a considerable problem on the road (Haikonen and Summala, 2001).
However, many countermeasures to prevent animals from entering the roadway or to change driver behavior were trialed but the majority were found to have generally very limited effect, particularly for deer in the United States (Hedlund et al., 2004).
These countermeasures include driver education, warning signs, roadside reflectors, deer repellents, lower speed limits and deer whistles. However, some studies found positive results. For example, Sullivan et al. (2004) found that temporary warning signs that were well lit at night during deer migration periods reduced the number of deer road-kills at experimental sites compared to control sites. However, the study did not report human casualties during the trial.
Review of technologies: Worldwide numerous technologies have been used in attempts to reduce big AVC. This section classifies the techniques used in the past to reduce AVC into three categories roadway-based, animal-based and vehicle-based techniques. The first category (roadway-based technique) was developed for and dedicated to the highways. It includes roadway fencing, underpasses, overpasses, roadway reflectors, warning signs, infra-red, microwave RF, etc. Roadway-based detection systems, however, are designed to inform all drivers, regardless of what equipment their vehicle may or may not have. The second category (animal-based) includes those technologies which were installed in animals to reduce the AVC. The third category (vehicle-based) includes the technologies that are equipped into vehicles to reduce the AVC.
ROADWAY-BASED TECHNOLOGIES
Roadway-Based conventional techniques
Fences: Fences have been installed to keep animals away from the road (De Molenaar and Henkens, 1998; Clevenger et al., 2001). Roadway fencing is the famous conventional techniques used to reduce AVC. Ward (1982) signified that a 2 m high big-game fence is effective in reducing vehicle collisions involving deer. Fencing is extremely expensive because they have been combined with wildlife crossing structures such as underpasses and overpasses that enable animals to move freely along both sides of the highways. Fencing must be inspected frequently and repaired to original condition to be successful at reducing collisions because animals quickly exploit breaks in the fence (Foster and Humphrey, 1995). Apparently, deer continually test fencing, making a good maintenance program necessary (Ward, 1982). Reed et al. (1982) estimated that maintenance cost for fencing was approximately 1% of construction cost per year. Moreover, fencing without crossing structure isolates animals' populations.
Warning signs: Signs that warn drivers of high big animals (e.g. deer) -crossing probabilities are the most common approach to reducing AVC (Putman, 1997). Romin and Bissonette (1996) suggested that deer crossing signs may be effective if drivers’ would reduce their vehicle speed. Lighted, animated deer-crossing warning signs were evaluated in Colorado. Pojar et al. (1975) concluded that drivers’ speeds were initially slightly reduced, but after the drivers got used to the animated sign, it lost its effect in reducing the drivers’ speeds.
Highway lighting: Most of the AVC occurred from sunset to sunrise. It was expected that highway lighting enhance drivers' night vision and reduce AVC. Highway lighting did not affect drivers’ behavior or animal crossings-per-accident ratios (Reed, 1981). Thus, increased highway lighting was not effective at reducing AVC.
Roadway-based detection systems: Animal detect technologies detect large animals as they approach the road. When an animal is detected, signs are activated that warn drivers that large animals may be on or near the road at that time. Vehicle detect technologies operate on a slightly different principle as they detect vehicles, not the animals. They detect vehicles or trains, not the animals. Once a vehicle or train is detected large animals are alerted through a range of audio and visual signals from stations placed in the right-of-way (Huijser and McGrowen, 2003). Briefly, different technologies used to develop animal-detect and vehicle-detect techniques are summarized below.
First, a series of passive infrared sensors were designed and installed in seven sites in Switzerland to detect deer within 30-100 m radius on both sides of the road. Once a deer was detected LED signs with a deer symbol were activated and stayed on for 45 seconds to alert the drivers (Kistler, 1998; Clevenger et al., 2001). This technique produced false detections because of strong winds and warm engines of passing vehicles. Roadway fencing is one of the famous conventional techniques used to reduce AVC. Ward (1982) signified that a 2m high big-game fence is effective in reducing vehicle collisions involving deer. Fencing is extremely expensive because they have been combined with wildlife crossing structures such as underpasses and overpasses that enable animals to move freely along both sides of the highways. Fencing must be inspected frequently and repaired to original conditions to be successful at reducing collisions because animals quickly exploit breaks in the fence (Foster and Humphrey, 1995). Apparently, deer continually test fencing, making a good maintenance program necessary (Ward, 1982). Moreover, the broken sensors, loss of power due to snow covered solar panels and broken lamps in the warning signs caused additional problems. Similarly, the Flashing Light Animal Sensing Host (FLASH) was designed to detect mule deer in Wyoming, USA. It also used a series of infrared sensors (Gordon, 2001). More than 50% of the detections through FLASH system were false. This was due to frost on the sensors, birds feeding on carrion in the crossing area and snow thrown by passing snowplows.
Second, in Finland, microwave radar sensors that were designed and installed to detect large animal (e.g. moose) movements up to 50 m in distance within a 60° horizontal angle. When a large animal was detected, LED message signs with a moose symbol were turned on and remained on for two-three minutes (Pynn and Pynn, 2004). To verify the presence of large animals a video camera is installed. In addition, to distinguish moose from other moving objects such as rain or rain spray, the system was programmed to only detect objects moving towards the sensors at a speed greater than 0.8 m sec-1. This technique produced false detection in spring when the snow melted and the water warmed on the pavement, spray from passing vehicles triggered the system.
Third, in 2000 an animal detection system was installed in Washington, USA. It consisted of two lasers, one placed on each side of the road, two standard deer warning signs, two smaller rectangular signs that read When Flashing and two solar-powered red flashing beacons. When the laser beam was broken the lights were switched on. The lasers operated on batteries with a one-week lifespan while the red strobes were solar powered. The sighting of the lasers proved difficult, partly because of the distance between the sensors. Sunlight heating up of the plastic boxes holding the laser equipment may have caused problems with the sighting of the laser (Shipley, 2001). False detections caused the batteries to drain quicker than anticipated. Finally, the system was taken down spring (Shipley, 2001). Similarly, in October 2002, an animal detection system was installed along US 97A, near Wenatchee, Washington (Al-Amr et al., 1998). It used laser beams to detect animals (e.g., deer). If these deer stay there longer than one minute, the warning signals were turned off and drivers are no longer warned of their presence (Romin and Bissonette, 1996).
Fourth, an animal detection system based on microwave technology was installed in 2002 along the highway in Montana (Evink et al., 2002). It consisted of series of transmitters and receivers. Each transmitter sent a uniquely coded, continuous microwave RF signal to its intended receiver (STS, 2002). The transmitters and receivers were mounted about 120 cm above the ground (designed to detect elk). If this signal was blocked, the receiver sent a UHF radio signal to the master station. The master station then sent the beacon-on command to the three nearest beacons. Each beacon was situated above a standard elk warning sign and signs that showed, when flashing next 1 mile. The flashing beacons alerted on-coming traffic that there might be a large animal on or near the road. After the designated timeout period (3 min), the master station transmitted the beacon-off command to the beacon stations. If the signal was blocked continuously, the beacons would stop flashing after 12 min. The system produced a large number of false detections for several causes such as snow spray.
A vehicle detect system was in April, 2002 in Canada. It consists of a small cabinet with electronics, sensors for vehicle detection and an animal warning device. When no vehicles are present, the system is not active. Once vehicles are detected, units in the roadside are activated that alert deer through a variety of noise and light signals (IRD, 2002). Therefore, the audio and visual signals produced by the stations in the right-of-way may not scare the animals away from the road once they have been exposed to it for a certain time. Additionally, such system is not well suited for high traffic flows since the animal warnings would be running continuously in such locations.
Animal-based technologies: The animal based technologies, to avoid animal collision, used different types of collars fasten with the animal to trigger a warning system such as blinking signals. They are classified as reflective collars and radio collars.
Reflective collars: In British Columbia, Canada, the ministry of environment conducted a method to reduce AVC. They put collars with reflective tape on a number of animals to increase their visibility to drivers (Tan and Huang, 2006).
Radio collars: Multiple projects utilized radio collars since 1999 up to now. A system was installed along a 4,827-m-long section of Hwy 101, near Sequim, on the Olympic Peninsula,Washington. In 1999 about 10% of the elk herd was radio collared (Carey, 2001). An effort was made to radio collar lead cows, but this was not always possible. Receivers placed along the road scan for the frequencies of the individual radio collars 24 h per day. When the radio-collared individuals come within about 400 m of the road, the receivers that pick up the signal activate the flashing beacons that are linked to that receiver. There are four receivers in total. Typically only one receiver picks up the signal at the same time, but if the radio-collared individual is about halfway between two receivers, the signal may be picked up by both receivers. Two receivers are linked to only one flashing beacon (at both ends of the road section). The two other receivers are each linked to two flashing beacons, one for each travel direction. To block false detections, a device that counted the pulses of the radio signal had to be added. This device filtered out signals from other, non-elk, radio transmitters. The system became operational in fall 2000. The batteries of the radios have a three-year life span, but most of them last much longer. A second capture session took place in March 2003. There were eight elk (7 cows, 1 bull) with a radio collar in September 2003. The system seems to work well, even after a change in habitat use caused the elk to cross the road more frequently than they used too.
Radio-collar systems, such as the one in Sequim, can also produce false negatives. It is unlikely that all the individuals in a certain area can be equipped with radio collars. As a consequence, the animals without a radio collar are only detected if radio-collared animals accompany them. Therefore, the system only works well for highly gregarious species. The system also works much better for a resident population than for migrants from far-away locations that may only cross the road once or twice per year. The radio-collar system requires re-collaring effort. In addition, individuals may die as a result of hunting, injuries or old age. Experts usually minimize the stress for the animals during capturing and handling, but the animals are exposed to a certain amount of stress during capturing and handling and as a result of carrying a radio collar.
Wildlife collisions are a worldwide problem and WSDOT is one of hundreds of agencies that have been trying for years to find effective and affordable ways to reduce them. WSDOT put radio collars on elk near Port Townsend that trigger flashing beacons telling drivers there are animals on the road ahead. It was found that when a collared elk settles down for the night near a receiver, the beacon flashes all night. Radio collars and capturing the elk to put them on, is also very expensive (Carey, 2001). This project deals with camels, domestic animals that needless of hunting efforts and the maintenance can be done easily by camel owners. A lesson was attained from the WSDOT that it is required to find a way to avoid continuous alarming when a collared camel settles down for the night near a receiver.
On the other hand, GPS collar is a valuable tool for documenting the movements of large, wide-ranging animal kinds. It provides abundant amounts of continuous movement data amid even extreme environmental conditions, while greatly reducing the number of man-hours required in the field. Recently, GPS collar has been instrumental in monitoring large mammals use of highways and wildlife underpasses in Arizona (Mckinney and Smith, 2007; Dodd et al., 2007; Gagnon et al., 2007). Using data gathered from GPS collar, Mckinney and Smith (2007) were able to identify spatial patterns in bighorn sheep movement relative to a key section of US 93. Based on GPS collar data, the authors were able to make recommendations regarding placement of wildlife-engineered crossing structures on US 93. Dodd et al. (2007) used GPS collars to assess permeability of SR 260 to elk through successive phases of reconstruction, which included widening the highway, integrating wildlife crossing structures and implementing ungulate-proof fencing. Gagnon et al. (2007, 2009) were able to determine how patterns in traffic flow affected elk crossing and distribution in the vicinity of SR 260; the authors found that although high traffic volumes greatly affected elk crossings, seasonality and proximity to quality habitat also strongly affected elk behavior.
Vehicle-based technologies: Vehicle-based technologies (typically infrared detectors) inform drivers when a large animal is detected within a certain range from the sensors attached to the vehicle (Bendix Commercial Vehicle System, 2004; Hirota et al., 2004; Honda Motor Co. Ltd., 2004). The range should be sufficient to allow for the driver to stop the vehicle before impacting the detected animal. The system could potentially detect large animals anywhere; it would not depend on the installation of any roadside equipment. However, it is uncertain whether these on-board detectors are still in production.
Communication based technologies: Numerous studies have been conducted in the field of communication using different tools for information transfer from one individual to another i.e., person-person or person to animal. Ragab et al. (2004a) reported that to meet the increasing demand for real-time content delivery, the proposed Autonomous Community Information System offers an efficient information dissemination infrastructure with a decentralized architecture. The aim of ACIS was to help end-user communicate and exchange information efficiently. In order to meet this goal, the system uses an application-level multicast technique that arbitrarily scales to large groups. The ACIS system also features a scalable community-construction and maintenance scheme that eases the burden of organizing an online community network.
Ragab et al. (2003a) and Ragab et al. (2004b) reported that Autonomous Community Information System (ACIS) is a proposition made to contend with the extreme dynamism in the large-scale information system. ACIS is a decentralized bilateral-hierarchy architecture that forms a community of individual end-users (community members) having the same interests and demands in somewhere, at specified time. It allows the community members to mutually cooperate and share information without loading up any single node excessively. In this paper, an autonomous decentralized community communication technique is proposed to assure a flexible, scalable and a multilateral communication among the community members. The main ideas behind this communication technique are: content-code communication (community service-based) for flexibility and multilateral benefits communication for scalable and productive cooperation among members. All members communicate productively for the satisfaction of all the community members. The scalability of the system's response time regardless of the number of the community members has been shown by simulation. Thus, the autonomous decentralized community communication technique reveals great results of the response time with continuous increasing in the total number of members.
In an other study, Ragab et al. (2003b) stated that the originality of the proposed communication technology dos not come only from the content-based communication but also from the reply-all that satisfies the multilateral benefits. In 1 to N community communication all members cooperate for the satisfaction of all community members contrary to the peer-peer (P2P) communication techniques. They concluded that the community is: service-based, cooperative, relationship and multilateral benefits communication.
Ragab et al. (2002) concluded that conventional communication technologies use the destination address (e.g. unicast address, multicast address) to send the data. In very changing environment likes ACIS (i.e. end-users are frequently joined and left), these conventional communication technologies are not applicable. Thus, the autonomous decentralized community communications technology has broached to assure a productive cooperation and a flexible and timely communication among members. In this communication technology, the sender does not specify the destination but only sends the content/request with its interest code (CC) to its neighbor nodes.
RESULTS AND DISCUSSION
The previous sections shows that diverse types of systems have been installed around the world to reduce AVC. Many of the systems encountered technical problems and maintenance issues. More importantly they experienced false positives and false negatives. The false positive occurs when the warning system is activated even if there is no animal. Whereas, false negative occurs when there is animal but the warning system is not activated. It is noteworthy that previous animal based detection systems, to which CVAAS fits in, have shown to produce less false positives and false negatives. False positives may cause drivers to eventually ignore activated signs (Gordon and Anderson, 2002) and false negatives present drivers with a hazardous situation. Drivers’ responses, through reducing vehicle speed or increased alertness, determines how effective animal detection systems really are. It is of immense importance that any system designed to reduce or avoid AVC should ensure minimal number of false positives and false negative. The CVAAS aims to address these false detection problems by using the novel idea of using GIS along with GPS which gives accurate positioning of an animal. Previously the GIS incorporated with GPS technologies were used to monitor and collect data for the migration and movements of the animals (Rutter, 2007; Turner et al., 2001). An integrated system of GIS and GPS is a novel idea in designing a system for avoiding domestic animal and vehicle collisions. In the following section we discuss the high level design of CVAAS.
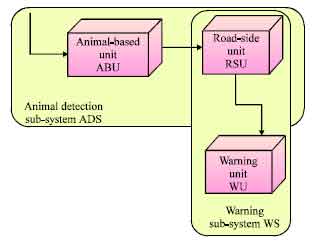
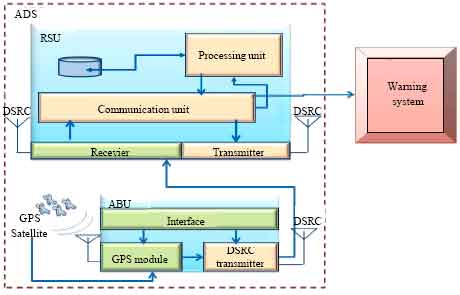
Design of Camel-Vehicle-Accident-Avoiding-System (CVAAS): The design of CVAAS consists of two sub-systems: Animal Detection sub-Systems (ADS) and Warning sub-System (WS) as shown in Fig. 3. ADS includes two units: Animal-Based Unit (ABU) and Road-Side Unit (RSU). ABU is attached to the animal and consists of GPS receiver, DSRC transmitter and interface as shown in Fig. 4. The European Telecommunications Standard Institute (ETSI) decided to allocate frequency band from 5875 to 5905 MHz for ITS (ETSI, 2008). Similarly, it was decided to utilize DSRC transmitter and receivers that operate with 10MHz band 5.885 to 5.895 GHz in CVAAS.
They operate with 33 dBm@10 MHz transmit power that enable transmitters and receivers to reach communication distance range from 500 to 1000 m.
 | |
| Fig. 3: | Block diagram of Camel-Vehicle-Accident-Avoiding-System (CVAAS) |
 | |
| Fig. 4: | Components of Camel-Vehicle-Accident-Avoiding-System (CVAAS) |
 | |
| Fig. 5: | Description of dangerous zones |
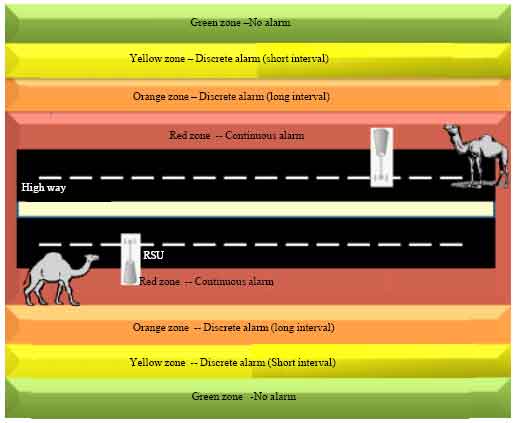
The GPS receiver operates to capture key data such as animal’s position, velocity, acceleration, heading, etc. The transmitter forwards that key data to the RSU. The ABU’s interface grants the ability to update the system parameters of both GPS receivers and DSRC transmitter such as the frequency of key data transmission, positioning times based on animal behavior (e.g. more frequent during activity, less frequent when relaxing), packet payload size and message life time. Road-Side units are organized along the highway. Each RSU consists of DSRC transmitter and receiver, communication unit, processing unit (Application processor) and storage area. It stores the highway map for a distance of 100-300m around the RSU and the description of the dangerous zones around (Fig. 5).
The RSU’s receiver gets the key data from ABU’s transmitter. The communication unit forwards the received key data to the RSU’s processing unit. The processing unit executes a thread that runs the RSU-activate procedure. As soon as, the RSU-activate procedure receives the key data that matches with the description of the dangerous zones it takes the decision to send activate message to the WS. The activate message includes the classification of dangerous zones. The WS executes a thread that runs the Warning setup procedure. When the Warning setup procedure receives the activate message, it identifies the degree of hazardous and setups the alarming period. For example, red-zone is the most dangerous zone that includes bi-direction lanes and stripes around it with range10-20 m. If the key data received from the ABU matched with the definition of the red-zone then the RSU activates the WS to produce continuous alarm until receives different data key from the ABU. Otherwise, the WS will not be activated whereas the key data matched with the definition of the green-zone.
Various alternatives to implement warning systems are summarized below.
 |
Warning systems: Different studies were conducted to determine the effectiveness of intelligent alerting systems for warning drivers of impending collisions. These include examining the effectiveness of such warning systems on different age groups (Maltz et al., 2004), as well as on comparing the effectiveness of alarm warnings presented through different modalities: visual (GMS, 2002), sound (Tijerina et al., 2000) and multi-staged alerts (Lee and Hoffman, 2004). Further research has also been conducted on drivers’ performance in distinguishing between sound alarms like auditory icons and beeps (Graham, 1999), as well as the effectiveness of visual warnings like warnings signs (GMS, 2002). These studies comprehensively studied a number of critical issues in the introduction of intelligent predictive alarms into the driving domain. The presentation of different alerts could affect drivers’ performance, as well as the interactions among the various other alerts and distractions combine to affect situational awareness of drivers. Recently, an alternative approach known as cooperative driving appeared based on vehicle-to-infrastructure (V2I) or vehicle-to-vehicle (V2V) communication (Tan and Huang, 2006; Kais et al., 2005; Luo and Hubaux, 2004). More specifically, this new approach of collaborative driving lies in the fact that the infrastructure or the vehicle can communicate its information (e.g. location) to surrounding vehicles or nearby infrastructure. In this case, the warning system is intended by incorporating the information communicated from the surrounding vehicles into the warning process.
Accordingly, one of the main objectives of the proposed system CVAAS was to provide a method and a system for warning drivers of the presence of camels and other large animals near to highways. The present invention provides a warning system to drivers to notify them of the presence of camels or other large animals along the highway, such that the drivers can slow down and drive cautiously to avoid an accident with the camels. The system includes a plurality of Road-Side-Unit (RSU) posts installed along the highway, with each post having a DSRC receiver for receiving signals that indicate the presence of camels. Each RSU is operatively connected to a warning system which is activated when a camel enters the danger zone. The Warning System (WS) and RSU can be connected to a battery which is coupled to a solar panel or to a power supply for recharging. The WS can be electrically connected in series such that all the lights are illuminated when one of the RSUs senses a camel. The warning system may also include some devices that are functional only at night (i.e. a light-sensitive photoelectric eye). The proposed warning system (CVAAS) may be innovative with significant technological contributions which involved:
An automatic detection and relevance check of traffic through a global-positioning-system (GPS);
| • | An organized vehicle-to-vehicle communication system for establishing a communication network with both the on-coming and following vehicles. Thus, a self-organized overlay network of vehicles is required to be implemented; |
| • | In-vehicle message management and warning dissemination; |
| • | A warning message management for transmission and distribution of hazard warnings, ensuring driver information in time at the right spot. |
| • | Holographic images can be used which contain visual information (warnings or signs) for installation as optical barriers in highways. As the drivers approach the danger area the holographic signs would inform them, visually, to ‘stop’ (Orazem, 1995; Blanche et al., 2010). |
CONCLUSIONS
This study conducted a survey of the developed animal detection and warning systems. It provided recent and numerous reviews of the worldwide technologies which are being used to reduce animal-vehicle collisions. Also, this paper introduced the design of the Camel-Vehicle Accident Avoidance System (CVAAS) in the Kingdom of Saudi Arabia. The CVAAS project took a first comprehensive step towards a system that will help detect camels on the highway and warn drivers as well. The innovative findings of this project is the careful and intelligent use of the GPS to detect the camel position, direction and movement. Moreover, CVAAS classified the dangerous zones that enables the warning system to adapt the alarming period.
ACKNOWLEDGMENTS
The authors would like to thank KACST (King Abdulaziz City for Science and Technology) for sponsoring this project. The authors also acknowledge the academic support from the College of Computer Science and Information Technology, King Faisal University.
REFERENCES
- Al-Ghamdi, A.S. and S.A. Al-Gadhi, 2004. Warning signs as countermeasures to camel-vehicle collisions in Saudi Arabia. Accid. Anal. Prev., 36: 749-760.
PubMed - Al-Sebai, M.W. and S. Al-Zahrani, 1997. Cervical spinal injuries caused by collisions of cars with camels. Injury, 28: 191-194.
PubMed - Ansari, S. and A.K.S. Ashraf, 1998. Camel collision as a major cause of low cervical spinal cord injury. Spinal Cord., 36: 415-417.
PubMed - Blanche, P.A., A. Bablumian, R. Voorakaranam, C. Christenson and W. Lin et al., 2010. Holographic three-dimensional telepresence using large-area photorefractive polymer. Nature, 468: 80-83.
CrossRef - Bruinderink, G.W.T.A. and E. Hazebroek, 1996. Ungulate traffic collisions in Europe. Conserv. Biol., 10: 1059-1067.
Direct Link - Clevenger, A.P., B. Chruszcz and K. Gunson, 2001. Highway mitigation fencing reduces wildlife-vehicle collisions. Wildlife Soc. Bull., 29: 646-653.
Direct Link - Foster, M.L. and S.R. Humphrey, 1995. Use of Highway underpasses by florida panthers and other wildlife. Wildlife Soc. Bull., 23: 95-100.
Direct Link - Gagnon, J.W., T.C. Theimer, N.L. Dodd, S. Boe and R.E. Schweinsburg, 2007. Traffic volume alters elk distribution and highway crossings in Arizona. J. Wildlife Manage., 71: 2318-2323.
CrossRefDirect Link - GMS, 2002. General motors corporation and delphi-delco electronic systems. Automotive Collision Avoidance Operational Field Test Warning Cue Implementations Summary Report. Publication No. DOT-HS-809-462, National Highway Transportation Safety Administration, U.S. Department of Transportation, 2002.
- Gordon, K.M. and S.H. Anderson, 2001. Motorist response to a deer-sensing warning system in western Wyoming. Proceedings of the 2001 International Conference on Ecology and Transportation, September 24-28, 2001, Raleigh, NC., pp: 549-558.
Direct Link - Graham, R., 1999. Use of auditory icons as emergency warnings: Evaluation within a vehicle collision avoidance application. Ergonomics, 42: 1233-1248.
PubMed - Haikonen, H. and H. Summala, 2001. Deer-vehicle crashes: Extensive peak at 1 hour after sunset. Am. J. Prev. Med., 21: 209-213.
PubMed - Hedlund, J.H., P.D. Curtis, G. Curtis and A.F. Williams, 2004. Methods to reduce traffic crashes involving deer: What works and what does not. Traffic Inj. Prev., 5: 122-131.
PubMed - Hirota, M., Y. Nakajima, M. Saito and M. Uchiyama, 2004. Low-cost infrared imaging sensors for automotive applications. Adv. Microsyst. Automotive Appl., 2004: 63-84.
CrossRef - Huijser, M.P. and P.T. McGowen, 2003. Overview of animal detection and animal warning systems in North America and Europe. Proceedings of the 2003 International Conference on Ecology and Transportation, (ET'03), Raleigh, NC, USA., pp: 368-382.
Direct Link - Langley, R.L., S.A. Higgins and K.B. Herrin, 2006. Risk factors associated with fatal animal-vehicle collisions in the United States, 1995-2004. Wilderness Environ. Med., 17: 229-239.
PubMed - Al-Hazmi, M. and H. Al-Bar, 1999. Mitigation of unguarded wild animal road accidents through consideration of their biological and behavioral nature. J. King Abdulaziz Univ., 11: 3-21.
Direct Link - Maltz, M., H. Sun, Q. Wu and R. Mourant, 2004. Use of in-vehicle alerting system for older and younger drivers: Does experience count. J. Transport. Res. Board, 1899: 64-70.
CrossRef - Pojar, T.M., R.A. Prosence, D.F. Reed and R.H. Woodward, 1975. Effectiveness of alighted, animated deer crossing sign. J. Wildlife Manage., 39: 87-91.
Direct Link - Putman, R.J., 1997. Deer and road traffic accidents: Options for management. J. Environ. Manage., 51: 43-57.
CrossRefDirect Link - Pynn, T.P. and B.R. Pynn, 2004. Moose and other large animal wildlife vehicle collisions: Implications for prevention and emergency care. J. Emerg. Nurs., 30: 542-547.
PubMed - Ragab, K., N. Kaji, H. Kuriyama and K. Mori, 2004. Autonomous decentralized community communication for information dissemination. J. IEEE Internet Comput., 8: 29-36.
CrossRef - Ragab, K., N. Kaji, H. Kuriyama and K. Mori, 2003. Scalable multilateral communication technique for large-scale information systems. Proceedings of the 27th Annual International Conference on Computer Software and Applications, (PSC`03), USA., pp: 222-222.
Direct Link - Reed, D.F., 1981. Effectiveness of highway lighting in reducing deer-vehicle collisions. J. Wildlife Manage., 45: 721-726.
Direct Link - Reed, D.F., T.D.I. Beck and T.N. Woodard, 1982. Methods of reducing deer-vehicle accidents: Benefit-cost analysis. Wildlife Soc. Bull., 10: 349-354.
Direct Link - Romin, L.A. and J.A. Bissonette, 1996. Deer-vehicle collisions: Status of state monitoring activities and mitigation efforts. Wildlife Soc. Bull., 24: 276-283.
Direct Link - Shipley, L.A., 2001. Evaluating Wolfi n as a repellent to wildlife on roads in Washington and the feasibility of using deer-activated warning signs to reduce deer- automobile collisions on highways in Washington. Research Report Research Project No. T9902. Department of Natural Resource Sciences, Washington State University, Pullman, WA, USA.
- Rutter, S.M., 2007. The integration of GPS, vegetation mapping and GIS in ecological and behavioural studies. R. Bras. Zootec., 36: 63-70.
CrossRef - Stout, R.J., R.C. Stedman, D.J. Decker and B.A. Knuth, 1993. Perceptions of risk from deer-related vehicle accidents: Implications for public preferences for deer herd size. Wildlife Soc. Bull., 21: 237-249.
Direct Link - Sullivan, T.L., A.F. Williams, T.A. Messmer, L.A. Hellinga and S.Y. Kyrychenko, 2004. Effectiveness of temporary warning signs in reducing deer-vehicle collisions during mule deer migrations. Wildlife Soc. Bull., 32: 907-915.
Direct Link - Tan, H.S. and J. Huang, 2006. DGPS-based vehicle-to-vehicle cooperative collision warning: Engineering feasibility viewpoints. IEEE Transportation Intell. Syst., 7: 415-428.
Direct Link - Turner, L.W., M. Anderson, B.T. Larson and M.C. Udal, 2001. Global Positioning Systems (GPS) and grazing behavior in cattle. Proceedings of the 6th International Symposium on Livestock Environment, May 21-23, 2001, Louisville, KY. USA., pp: 640-650.
Direct Link - Orazem, V., 1995. Holography as an element of the media architecture. Proc. Int. Symp. Display Holography, 2333: 168-177.
CrossRef